
一种多光谱遥感影像变化检测方法.pdf

一条****丹淑


1/10

2/10
3/10
4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多光谱遥感影像变化检测方法.pdf
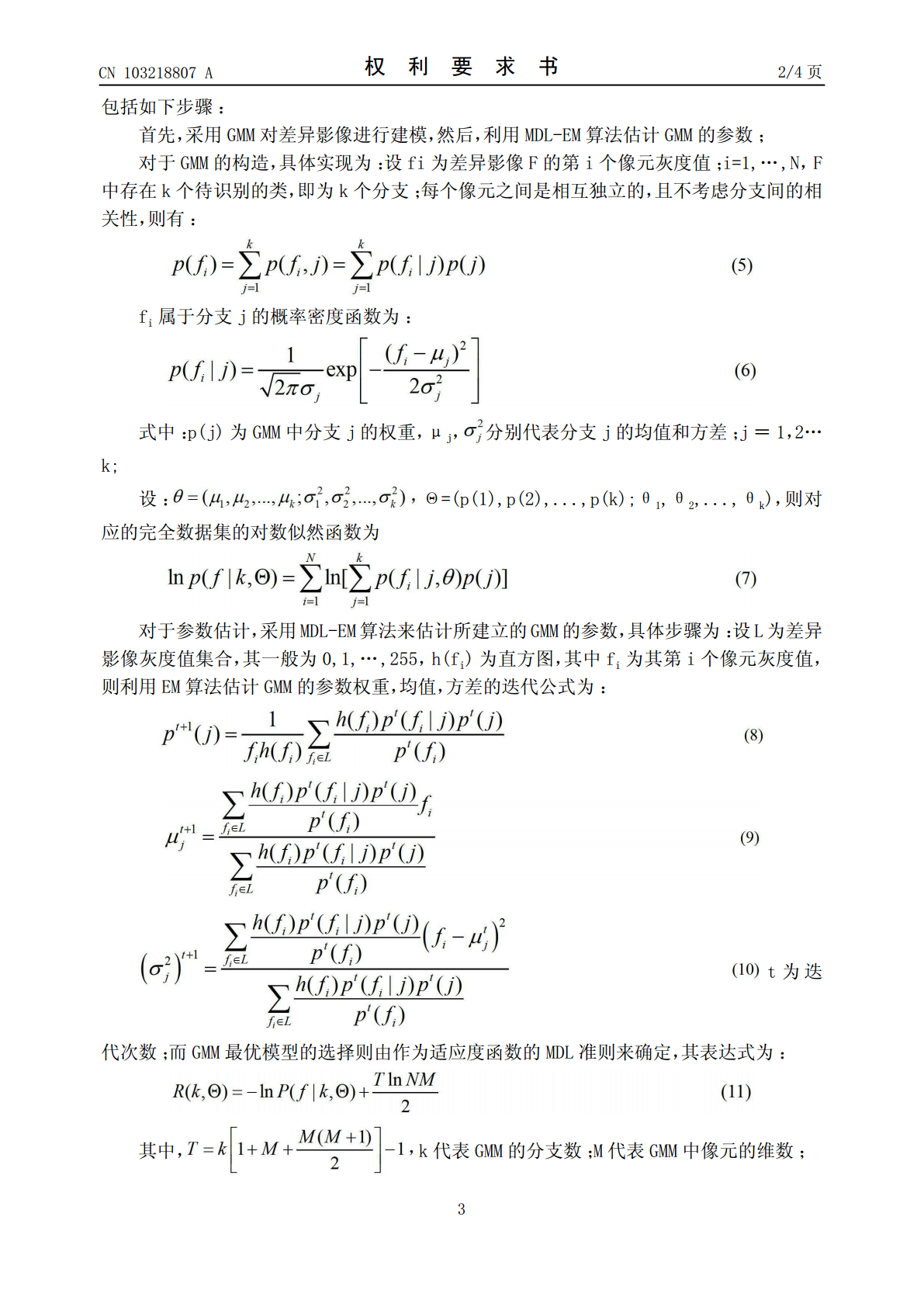
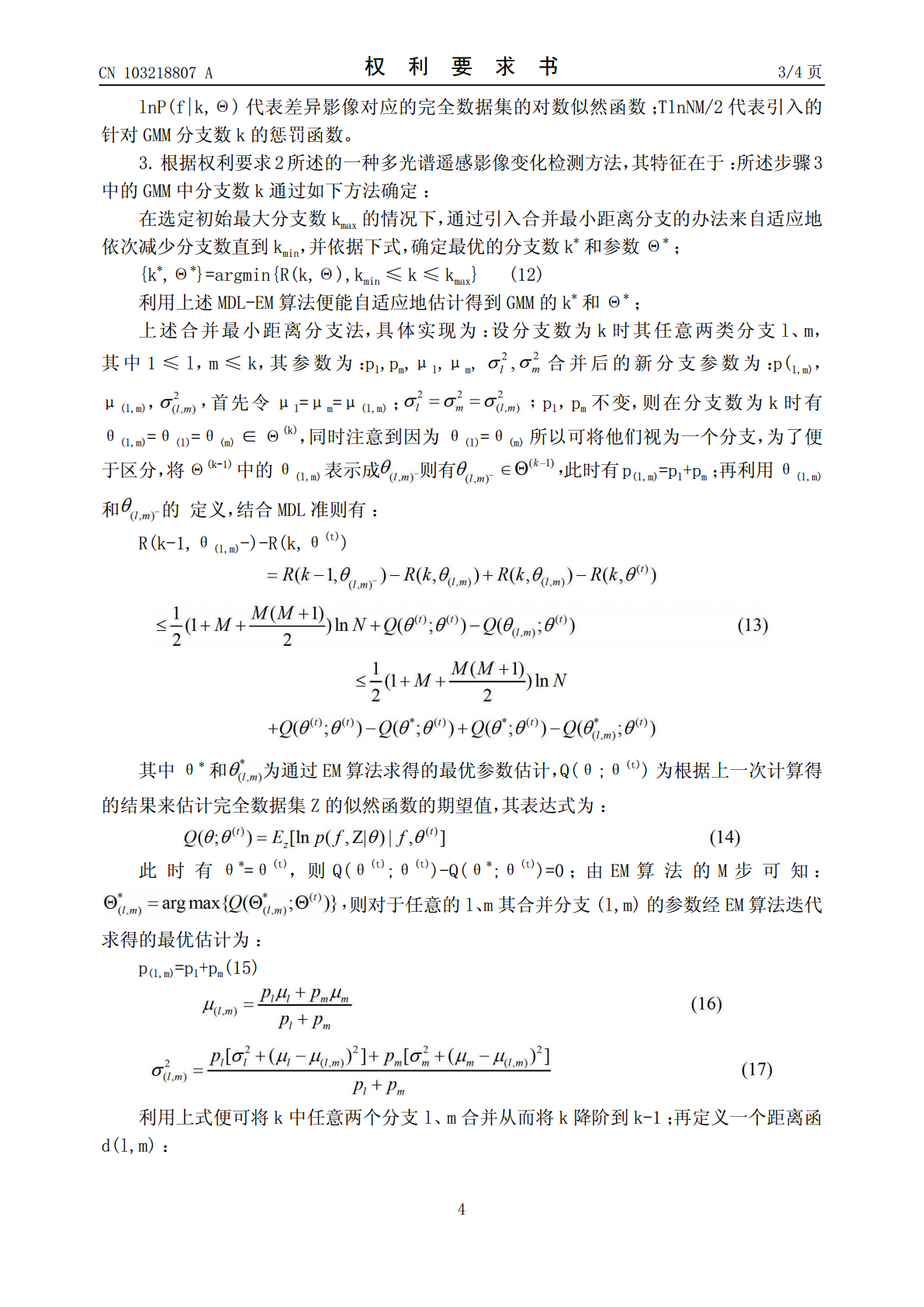
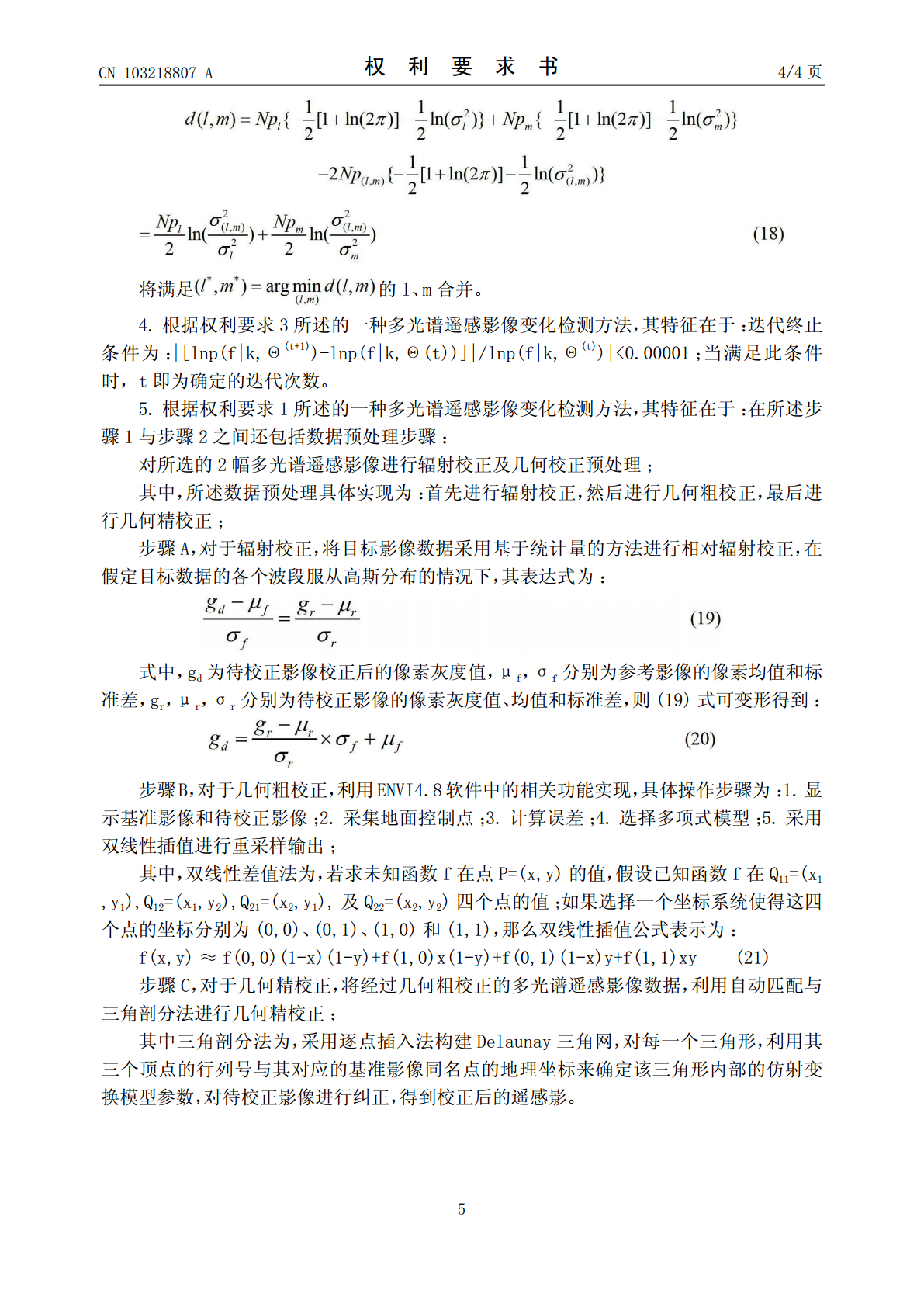
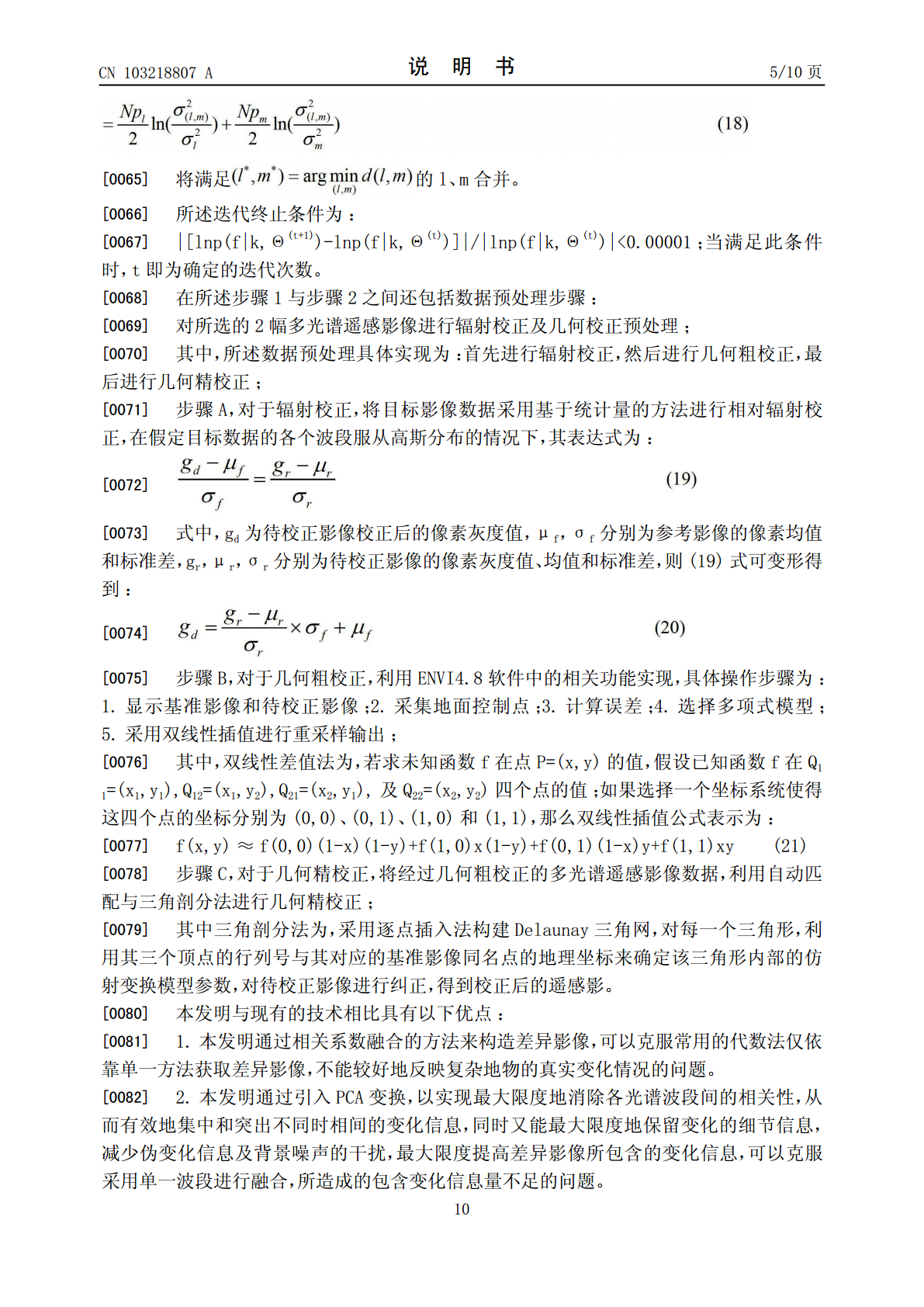
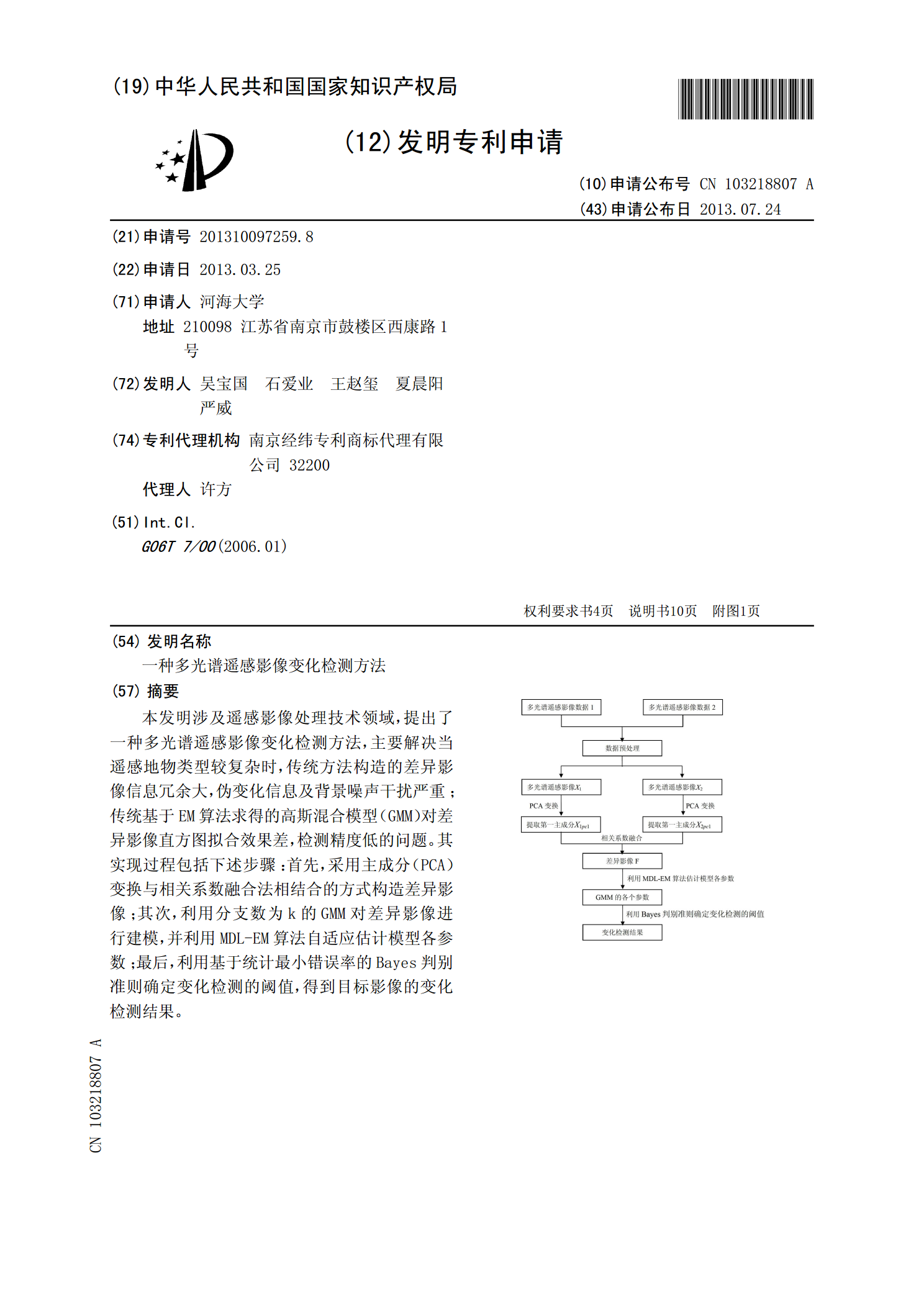
本发明涉及遥感影像处理技术领域,提出了一种多光谱遥感影像变化检测方法,主要解决当遥感地物类型较复杂时,传统方法构造的差异影像信息冗余大,伪变化信息及背景噪声干扰严重;传统基于EM算法求得的高斯混合模型(GMM)对差异影像直方图拟合效果差,检测精度低的问题。其实现过程包括下述步骤:首先,采用主成分(PCA)变换与相关系数融合法相结合的方式构造差异影像;其次,利用分支数为k的GMM对差异影像进行建模,并利用MDL-EM算法自适应估计模型各参数;最后,利用基于统计最小错误率的Bayes判别准则确定变化检测的阈值

面向对象的多光谱遥感影像变化检测方法研究.docx
面向对象的多光谱遥感影像变化检测方法研究面向对象的多光谱遥感影像变化检测方法研究摘要:随着遥感技术的不断发展,多光谱遥感影像的变化检测成为遥感应用领域中的研究热点之一。本论文以面向对象的方法为基础,研究了多光谱遥感影像的变化检测方法。首先对多光谱遥感影像进行预处理,包括辐射校正、大气校正和几何校正。然后,利用面向对象分割方法将图像分割成不同的目标物体,获取目标物体的特征信息。最后,通过对比不同时间的多光谱遥感影像,利用特征信息进行变化检测。实验结果表明,面向对象的多光谱遥感影像变化检测方法能够有效地提取变

面向对象的多光谱遥感影像变化检测方法研究的开题报告.docx
面向对象的多光谱遥感影像变化检测方法研究的开题报告一、选题背景及意义多光谱遥感影像变化检测是遥感应用的一个重要方向,主要用于检测不同时间段内地表的变化情况,例如城市扩展、林地变化、湖泊水位变化等。随着遥感技术的不断发展,获取的遥感影像数据量越来越大,观测时间频率也越来越高,因此,发展高效、准确的多光谱遥感影像变化检测方法对于提高遥感应用的效率和精度具有重要的意义。多光谱遥感影像变化检测方法主要分为两种,一种是基于像元级的变化检测方法,另一种是基于目标级的变化检测方法。目标级变化检测方法主要是通过目标分类来

面向对象的多光谱遥感影像变化检测方法研究的任务书.docx
面向对象的多光谱遥感影像变化检测方法研究的任务书任务书任务名称:面向对象的多光谱遥感影像变化检测方法研究任务目的:本任务旨在探讨基于面向对象的多光谱遥感影像变化检测方法,并研究变化检测中的关键技术,以提高遥感影像变化检测的准确性和可靠性。具体地,本任务包括以下目标:1.分析面向对象的多光谱遥感影像变化检测的基本原理;2.探究遥感影像变化检测中的区域分割、特征提取、分类识别等关键技术,并对其进行改进和优化;3.基于现有数据集和实际遥感影像数据,进行实验验证,并评估算法的性能和准确性;4.撰写本任务的研究报告

融合多特征的遥感影像变化检测方法.docx
融合多特征的遥感影像变化检测方法摘要:遥感影像变化检测是遥感图像处理和应用中的重要问题之一。随着遥感技术的不断发展,获取的遥感数据也越来越丰富,多源、多特征遥感影像的融合应用已成为遥感影像检测领域的研究热点。本文针对这一问题,提出了一种融合多特征的遥感影像变化检测方法,该方法通过融合空间信息、时序信息、谱信息和纹理信息等多个特征,提高了变化检测的准确性和稳定性。实验结果表明,该方法在真实数据集上均取得了较好的变化检测效果。关键词:遥感影像,变化检测,特征融合,空间信息,时序信息,谱信息,纹理信息一、引言遥