
一种自动装配系统及装配方法.pdf

是你****馨呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动装配系统及装配方法.pdf
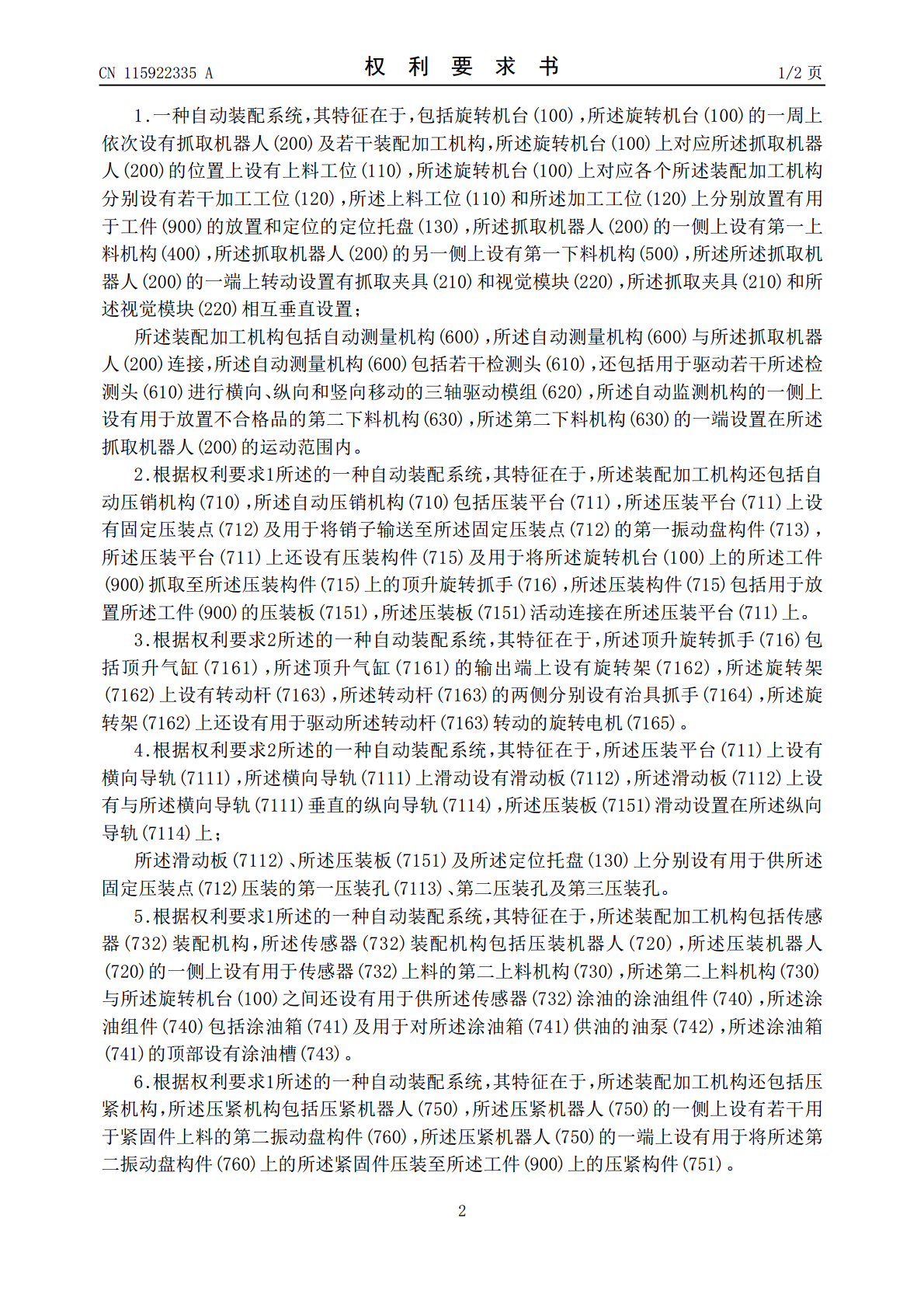
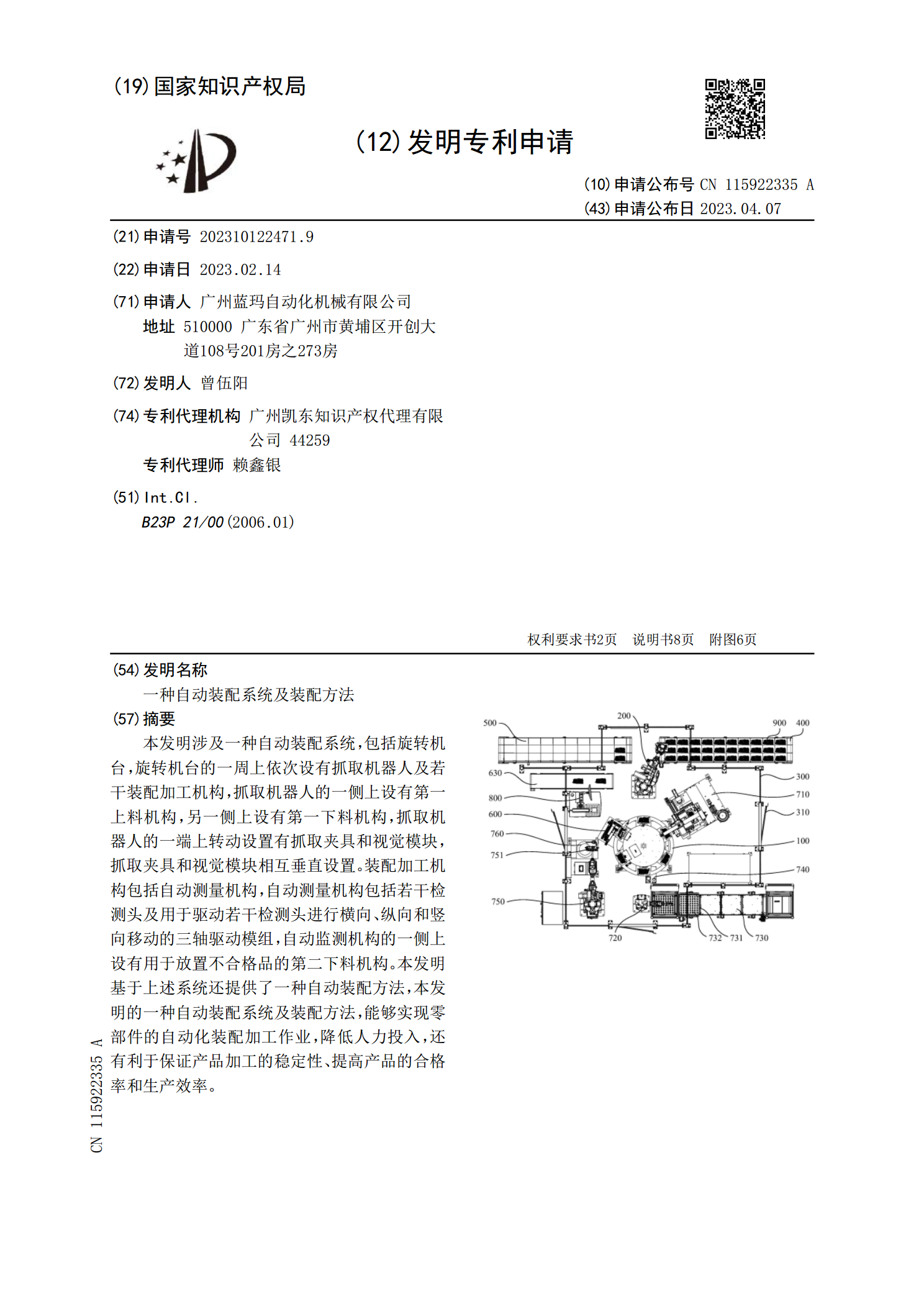
本发明涉及一种自动装配系统,包括旋转机台,旋转机台的一周上依次设有抓取机器人及若干装配加工机构,抓取机器人的一侧上设有第一上料机构,另一侧上设有第一下料机构,抓取机器人的一端上转动设置有抓取夹具和视觉模块,抓取夹具和视觉模块相互垂直设置。装配加工机构包括自动测量机构,自动测量机构包括若干检测头及用于驱动若干检测头进行横向、纵向和竖向移动的三轴驱动模组,自动监测机构的一侧上设有用于放置不合格品的第二下料机构。本发明基于上述系统还提供了一种自动装配方法,本发明的一种自动装配系统及装配方法,能够实现零部件的自动
一种汽车挡风玻璃自动装配系统及自动装配方法.pdf
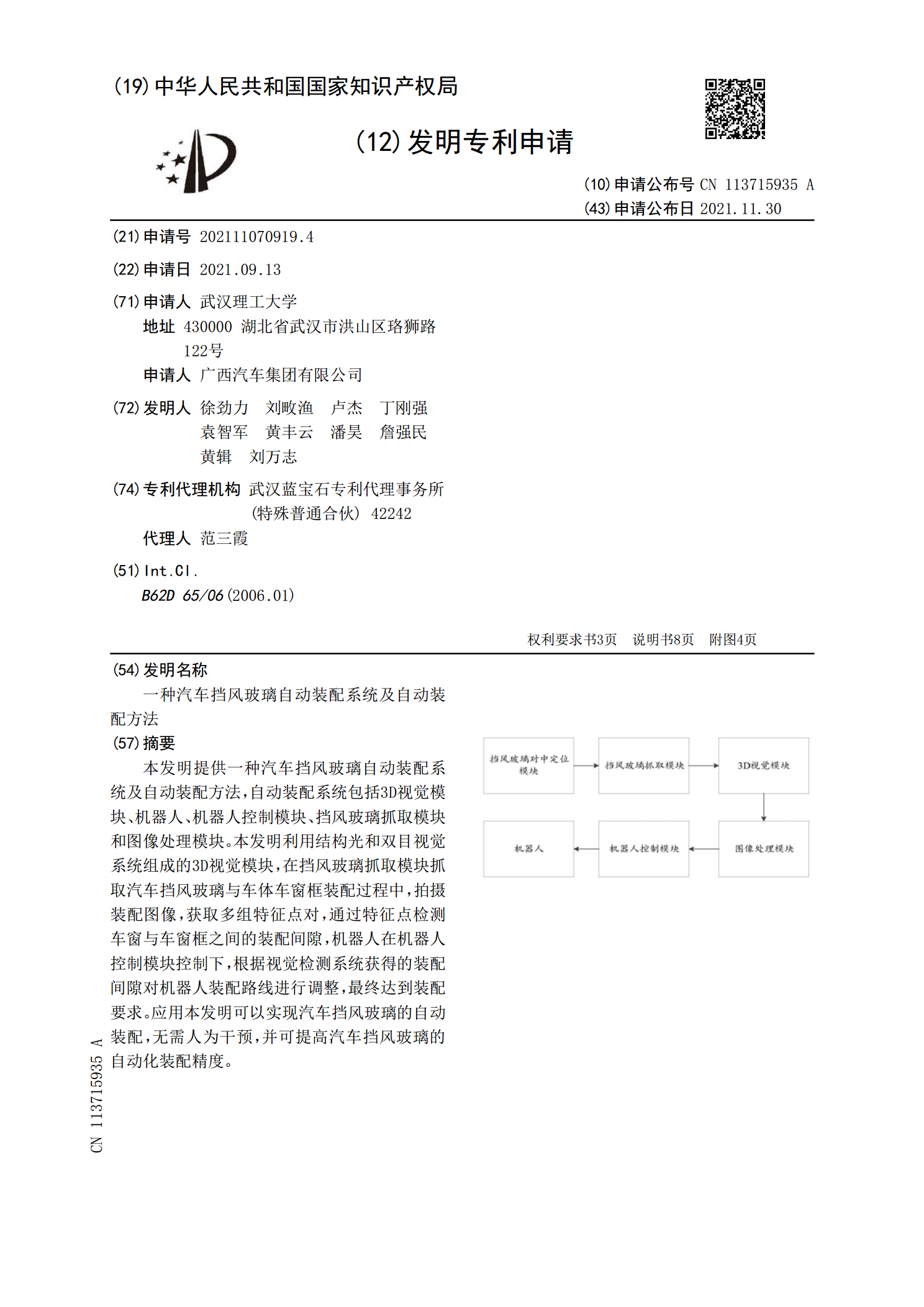
本发明提供一种汽车挡风玻璃自动装配系统及自动装配方法,自动装配系统包括3D视觉模块、机器人、机器人控制模块、挡风玻璃抓取模块和图像处理模块。本发明利用结构光和双目视觉系统组成的3D视觉模块,在挡风玻璃抓取模块抓取汽车挡风玻璃与车体车窗框装配过程中,拍摄装配图像,获取多组特征点对,通过特征点检测车窗与车窗框之间的装配间隙,机器人在机器人控制模块控制下,根据视觉检测系统获得的装配间隙对机器人装配路线进行调整,最终达到装配要求。应用本发明可以实现汽车挡风玻璃的自动装配,无需人为干预,并可提高汽车挡风玻璃的自动化
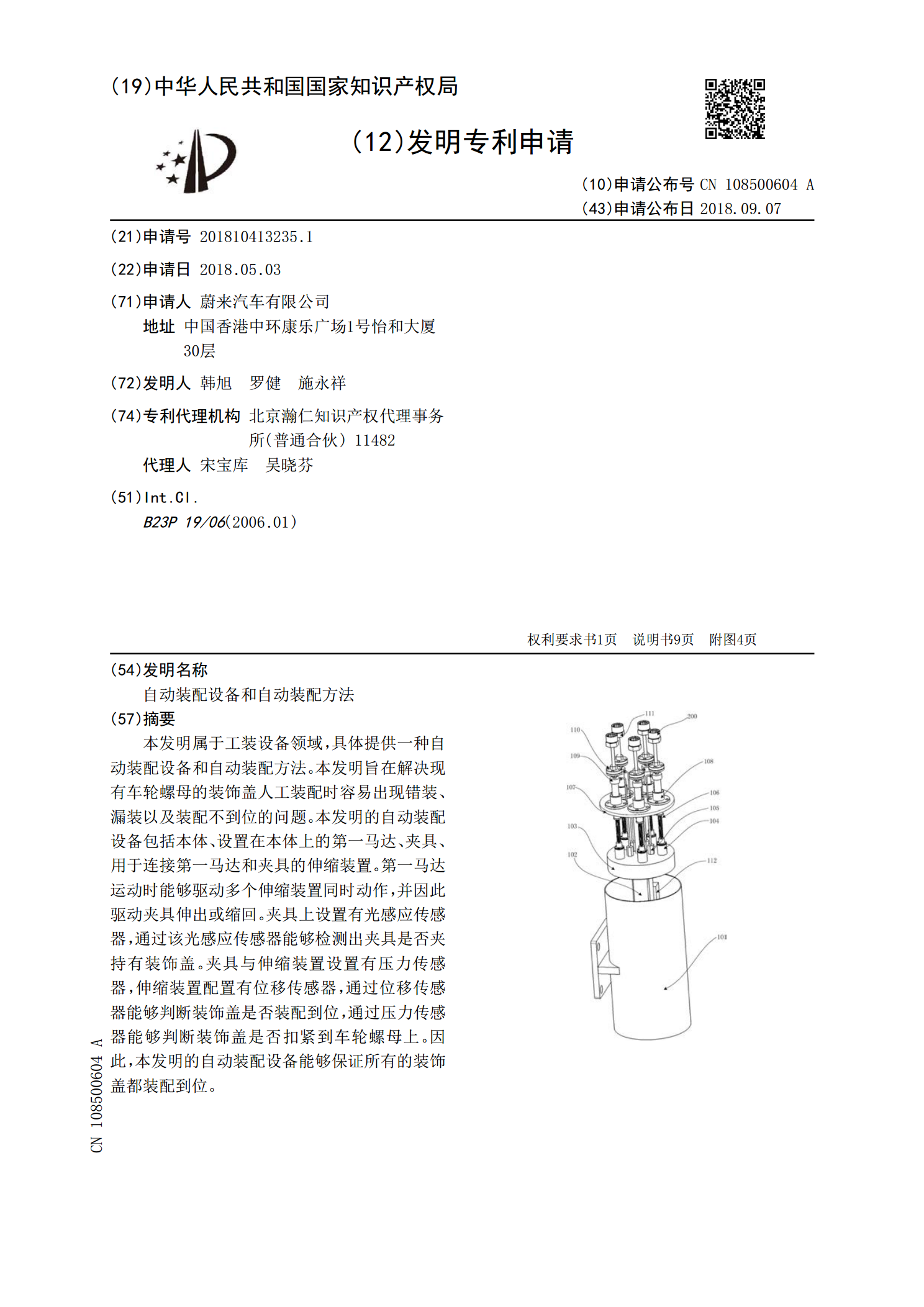
自动装配设备和自动装配方法.pdf
本发明属于工装设备领域,具体提供一种自动装配设备和自动装配方法。本发明旨在解决现有车轮螺母的装饰盖人工装配时容易出现错装、漏装以及装配不到位的问题。本发明的自动装配设备包括本体、设置在本体上的第一马达、夹具、用于连接第一马达和夹具的伸缩装置。第一马达运动时能够驱动多个伸缩装置同时动作,并因此驱动夹具伸出或缩回。夹具上设置有光感应传感器,通过该光感应传感器能够检测出夹具是否夹持有装饰盖。夹具与伸缩装置设置有压力传感器,伸缩装置配置有位移传感器,通过位移传感器能够判断装饰盖是否装配到位,通过压力传感器能够判断
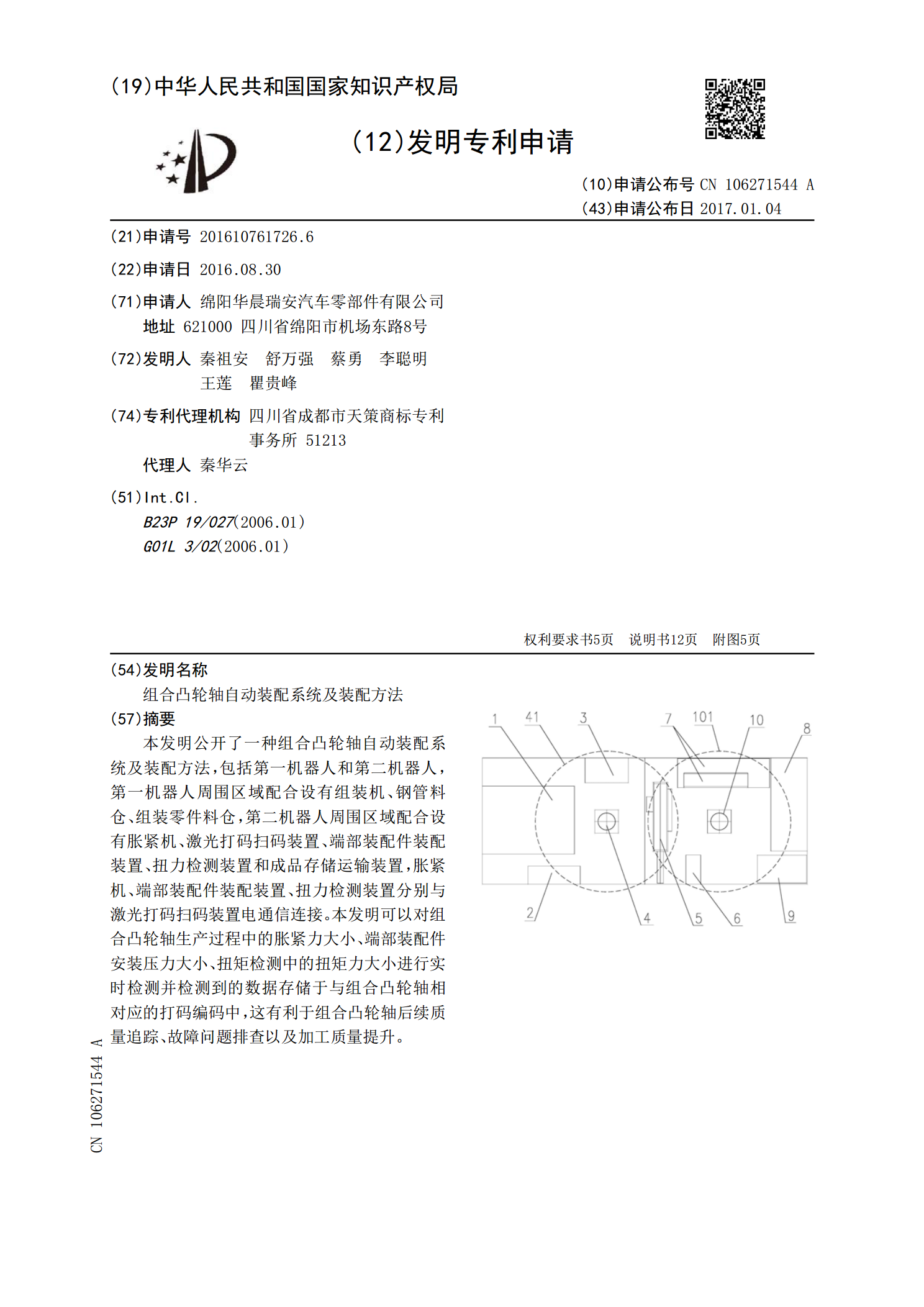
组合凸轮轴自动装配系统及装配方法.pdf
本发明公开了一种组合凸轮轴自动装配系统及装配方法,包括第一机器人和第二机器人,第一机器人周围区域配合设有组装机、钢管料仓、组装零件料仓,第二机器人周围区域配合设有胀紧机、激光打码扫码装置、端部装配件装配装置、扭力检测装置和成品存储运输装置,胀紧机、端部装配件装配装置、扭力检测装置分别与激光打码扫码装置电通信连接。本发明可以对组合凸轮轴生产过程中的胀紧力大小、端部装配件安装压力大小、扭矩检测中的扭矩力大小进行实时检测并检测到的数据存储于与组合凸轮轴相对应的打码编码中,这有利于组合凸轮轴后续质量追踪、故障问题
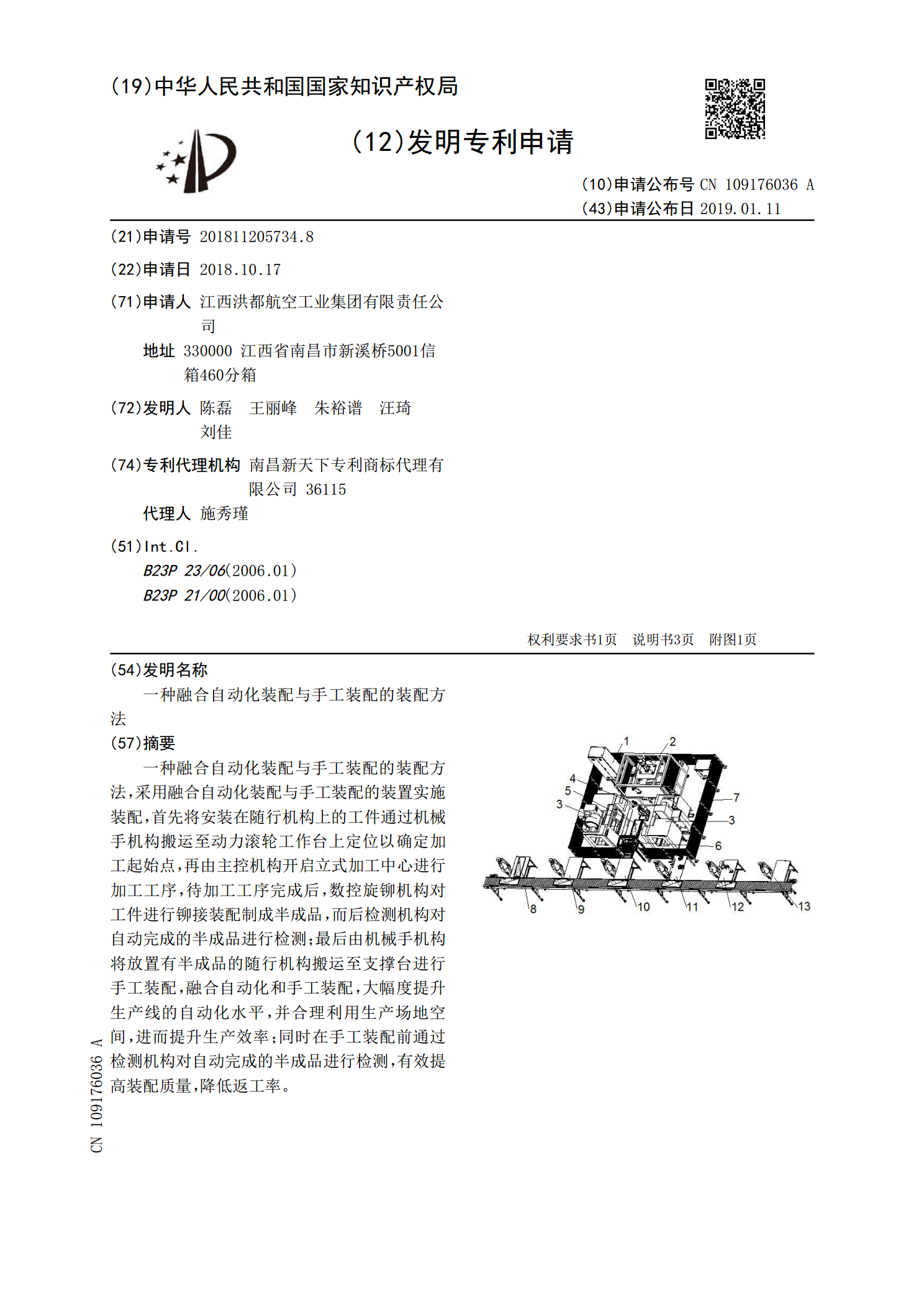
一种融合自动化装配与手工装配的装配方法.pdf
一种融合自动化装配与手工装配的装配方法,采用融合自动化装配与手工装配的装置实施装配,首先将安装在随行机构上的工件通过机械手机构搬运至动力滚轮工作台上定位以确定加工起始点,再由主控机构开启立式加工中心进行加工工序,待加工工序完成后,数控旋铆机构对工件进行铆接装配制成半成品,而后检测机构对自动完成的半成品进行检测;最后由机械手机构将放置有半成品的随行机构搬运至支撑台进行手工装配,融合自动化和手工装配,大幅度提升生产线的自动化水平,并合理利用生产场地空间,进而提升生产效率;同时在手工装配前通过检测机构对自动完成