
夹取机构.pdf

一条****ee


1/6
2/6

3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
夹取机构.pdf
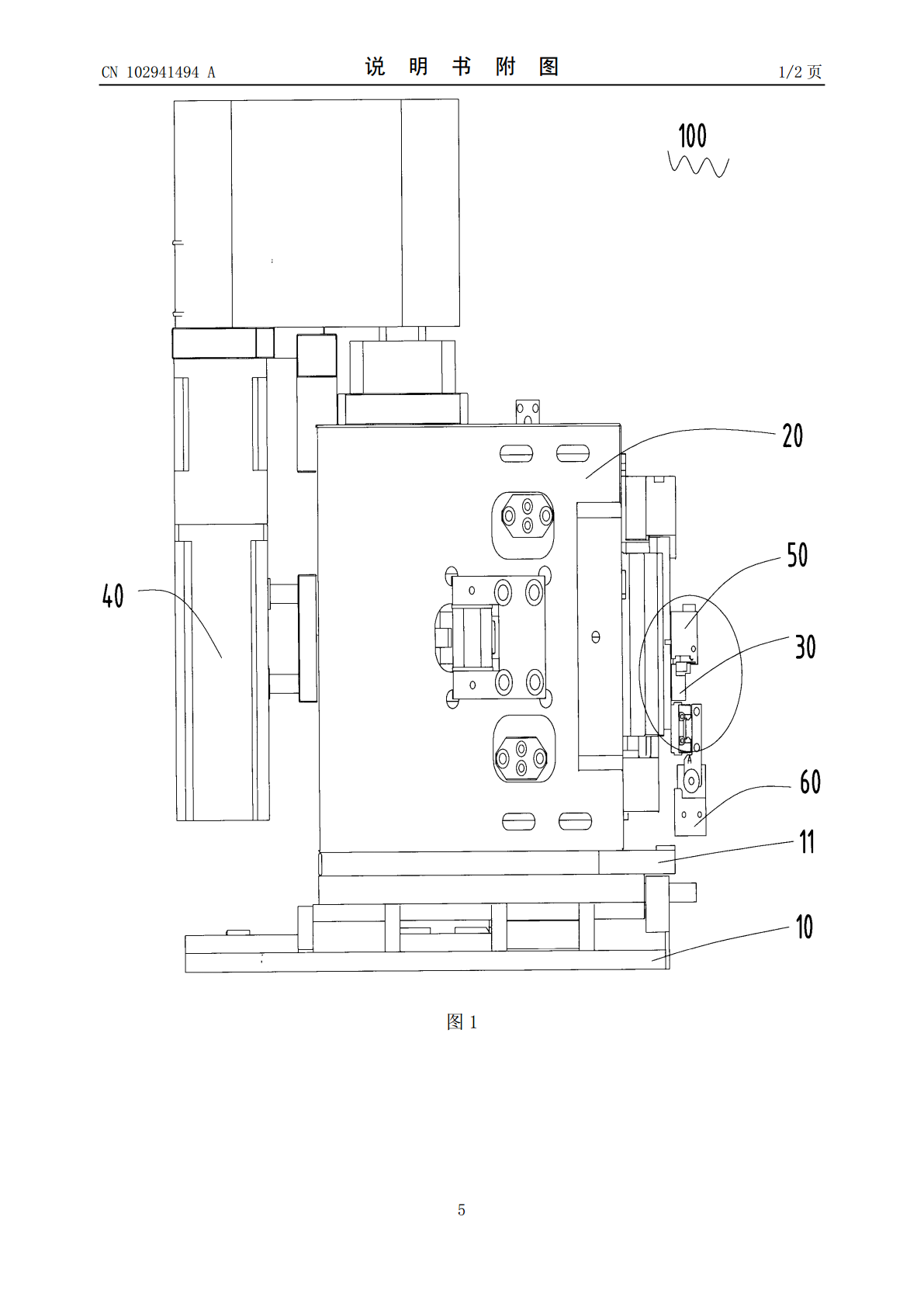
一种夹取机构,用于搬运物料,其包括第一夹持臂、连接第一夹持率的第一气缸、第二夹持臂、连接第二夹持臂的第二气缸,所述第一夹持臂互相对应,且第一夹持臂可相对第二夹持臂相向或背离运动,第一夹持臂定义了第一夹持面,第二夹持臂定义了第二夹持面,所述第二夹持面在水平方向上的长度不小于物料上单个工件在该方向上的长度。夹取机构的第二夹持臂可支撑物料,防止搬运过程中连接物料的料带边断裂或弯折。
快速夹取机构.pdf
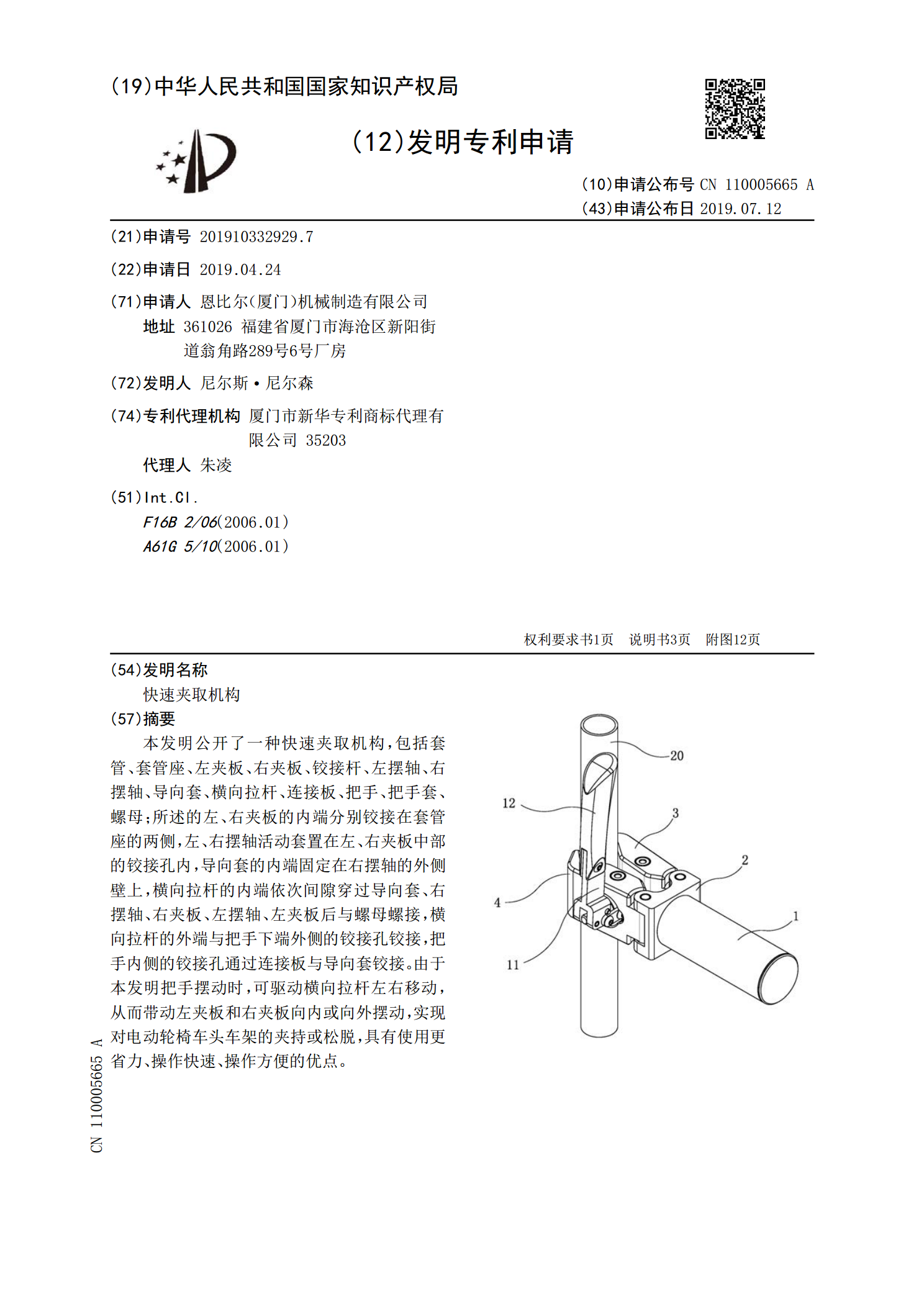
本发明公开了一种快速夹取机构,包括套管、套管座、左夹板、右夹板、铰接杆、左摆轴、右摆轴、导向套、横向拉杆、连接板、把手、把手套、螺母;所述的左、右夹板的内端分别铰接在套管座的两侧,左、右摆轴活动套置在左、右夹板中部的铰接孔内,导向套的内端固定在右摆轴的外侧壁上,横向拉杆的内端依次间隙穿过导向套、右摆轴、右夹板、左摆轴、左夹板后与螺母螺接,横向拉杆的外端与把手下端外侧的铰接孔铰接,把手内侧的铰接孔通过连接板与导向套铰接。由于本发明把手摆动时,可驱动横向拉杆左右移动,从而带动左夹板和右夹板向内或向外摆动,实现

汽车配件夹取机构.pdf
本发明涉及汽车配件夹取机构,包括吊取机构、安装架,吊取机构的下端和安装架相连,安装架设有用于安装捡取汽车配件的夹爪,安装架上设有齿轮以及远离齿轮的支撑板,安装架上还滑动连接有和齿轮啮合的齿条,齿条的端部连接有推杆,该推杆穿过开在支撑板上的通孔;安装架的底部分别铰接有左夹爪和右夹爪,左夹爪和右夹爪之间构成夹持空间;所述推杆上设有左挡块和右挡块,左挡块的下端设有支撑部,该支撑部位于左夹爪背离夹持空间的一侧;右夹爪驱动端上开有限位孔,推杆穿过该限位孔,右挡块位于右夹爪驱动端的内侧。上述方案通过机械代替人工,避免

实验鼠夹取机构.pdf
本发明公开了一种实验器械,尤其是一种实验鼠夹取机构,包括夹头、拉杆和手柄杆;夹头包括左夹爪、右夹爪、左连接杆、右连接杆和连接块;左夹爪和右夹爪均呈L形,左夹爪和右夹爪均包括头端、臂和尾端;左连接杆的一端铰接在连接块上、另一端铰接在右夹爪的尾端;右连接杆的一端铰接在连接块上、另一端铰接在左夹爪的尾端;左夹爪的臂与右夹爪的臂铰接、铰接点固定在手柄杆的一端;拉杆与手柄杆并排设置;拉杆一端与连接块连接、另一端设有拉环。该装置可以取代人手在鼠笼中夹取实验鼠,避免实验员被咬伤。该装置可用于医学、药学、生物学等科研实验
一种夹取机构.pdf
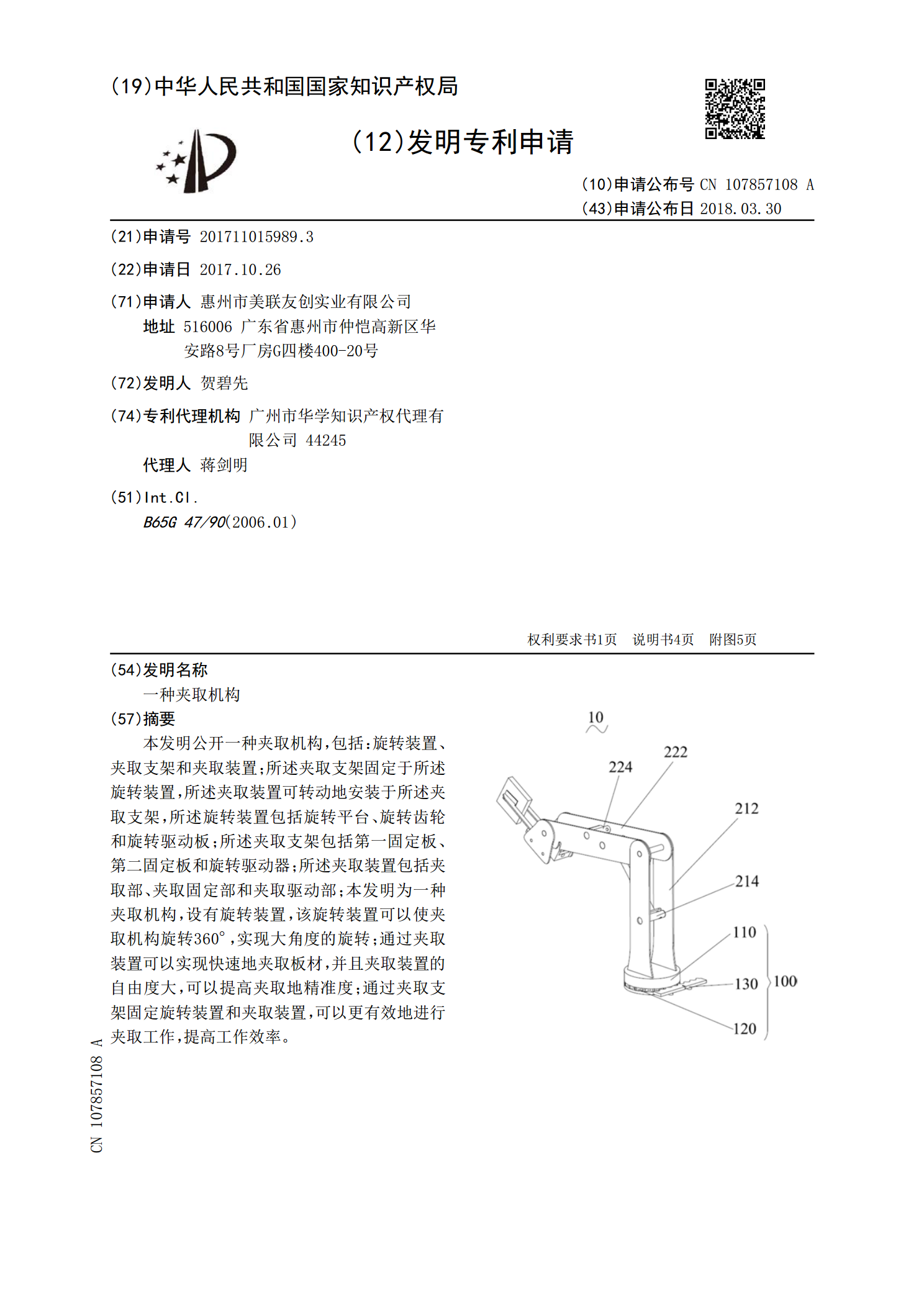
本发明公开一种夹取机构,包括:旋转装置、夹取支架和夹取装置;所述夹取支架固定于所述旋转装置,所述夹取装置可转动地安装于所述夹取支架,所述旋转装置包括旋转平台、旋转齿轮和旋转驱动板;所述夹取支架包括第一固定板、第二固定板和旋转驱动器;所述夹取装置包括夹取部、夹取固定部和夹取驱动部;本发明为一种夹取机构,设有旋转装置,该旋转装置可以使夹取机构旋转360°,实现大角度的旋转;通过夹取装置可以实现快速地夹取板材,并且夹取装置的自由度大,可以提高夹取地精准度;通过夹取支架固定旋转装置和夹取装置,可以更有效地进行夹取