
一种可调节重心的外骨骼腰部装置.pdf

一只****ua


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可调节重心的外骨骼腰部装置.pdf
本发明公开了一种可调节重心的外骨骼腰部装置,包括:凸轮连杆机构、髋‑腿连接部分、弹簧调节装置、腰板、背靠板。在髋关节部分有一处伸缩装置,适用胖瘦不同的穿戴者。在腰板下侧设置一个连杆固定架,作为凸轮连杆机构中连杆的支撑点。连杆一头做成凸轮滚子槽形状,使安置在背靠板上凸轮滚子在其凸轮槽内运动。背靠板两侧分别设置一个固定凸轮用位置。在髋关节与腰板之间设有弹簧。本发明有益效果是:能够满足穿戴者在穿戴外骨骼完成之后,依靠机械机构和穿戴者的共同作用下,背负一定重量的物体可以使得整个系统的重心处于系统稳定工作的区域。穿
一种腰部外骨骼助力装置.pdf
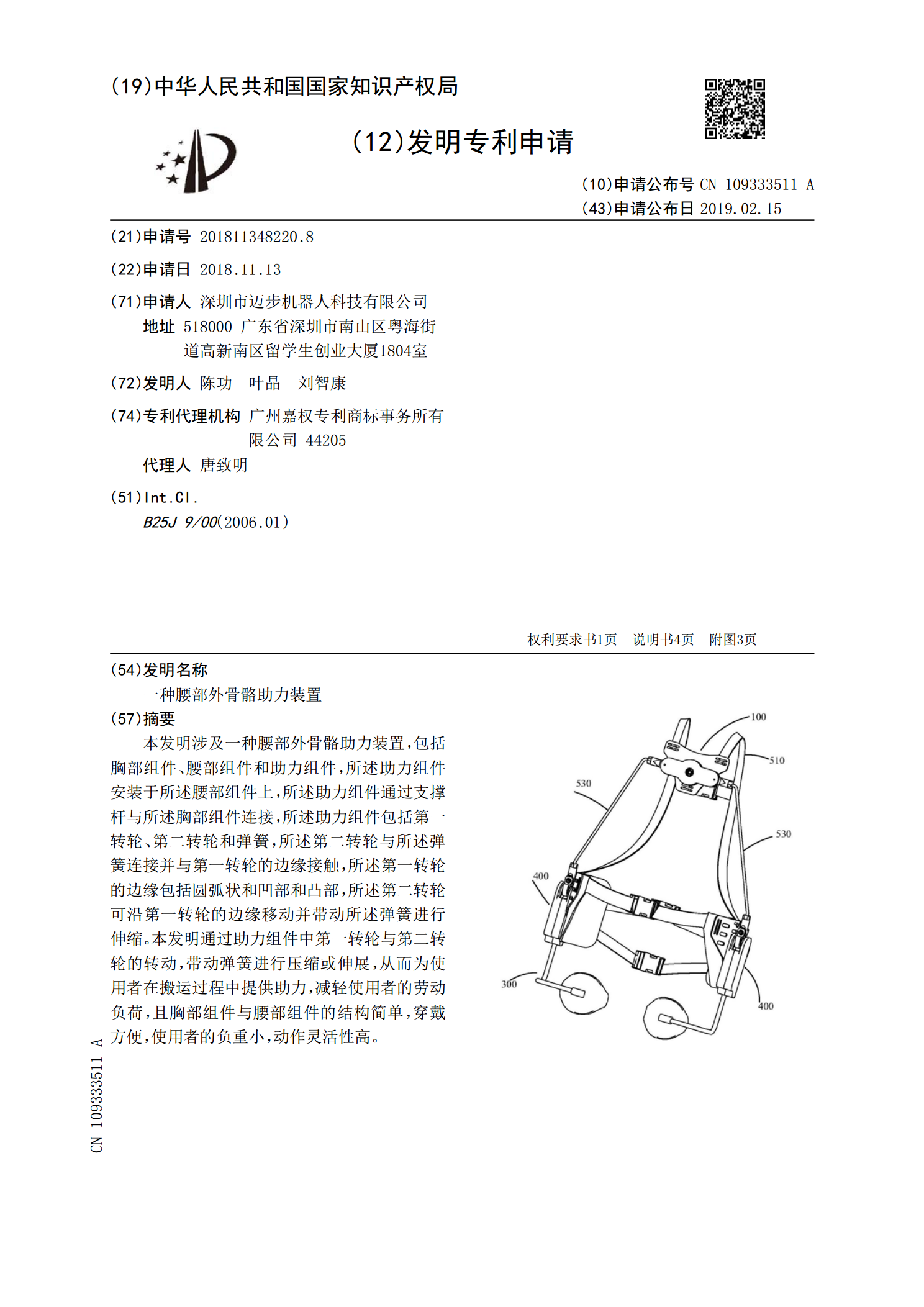
本发明涉及一种腰部外骨骼助力装置,包括胸部组件、腰部组件和助力组件,所述助力组件安装于所述腰部组件上,所述助力组件通过支撑杆与所述胸部组件连接,所述助力组件包括第一转轮、第二转轮和弹簧,所述第二转轮与所述弹簧连接并与第一转轮的边缘接触,所述第一转轮的边缘包括圆弧状和凹部和凸部,所述第二转轮可沿第一转轮的边缘移动并带动所述弹簧进行伸缩。本发明通过助力组件中第一转轮与第二转轮的转动,带动弹簧进行压缩或伸展,从而为使用者在搬运过程中提供助力,减轻使用者的劳动负荷,且胸部组件与腰部组件的结构简单,穿戴方便,使用者

一种腰部外骨骼系统.pdf
本发明涉及一种腰部外骨骼系统,包括动力装置,所述动力装置包括动力组件和传动组件,动力组件与传动组件连接并驱动所述传动组件运动;腰部装置包括用于固定所述动力装置的腰部卡板,所述传动组件与所述腰部卡板连接并带动所述腰部卡板相对所述传动组件转动;胸部装置与所述传动组件连接,所述传动组件带动所述胸部装置相对所述腰部装置转动。本发明中的腰部外骨骼系统,通过动力组件为传动组件提供动力支持,传动组件带动胸部装置、腰部装置转动,并驱动胸部装置及腰部装置相互转动,为使用者在弯腰下倾及直立过程中提供动力,减轻了使用者的劳动强

用于穿戴式下肢外骨骼机器人与人体腰部固定的调节装置.pdf
本发明公开了用于穿戴式下肢外骨骼机器人与人体腰部固定的调节装置,由左右对称的两个结构相同的调节结构组成;所述的两个结构相同的调节结构通过宽度固定板连接在一起;其中一个所述的调节机构由偏心夹具、两个光滑杆件、厚度调节板、腰部固定板、连杆滑块机构、宽度调节板、双头螺栓和转轮组成;本发明有效地解决了现有的外骨骼机人腰部固定不能连续调节宽度和厚度、操作繁琐、不满足互换性要求以及不能很好地适应不同体型的人体的问题。
腰部手动调节牵引装置.pdf
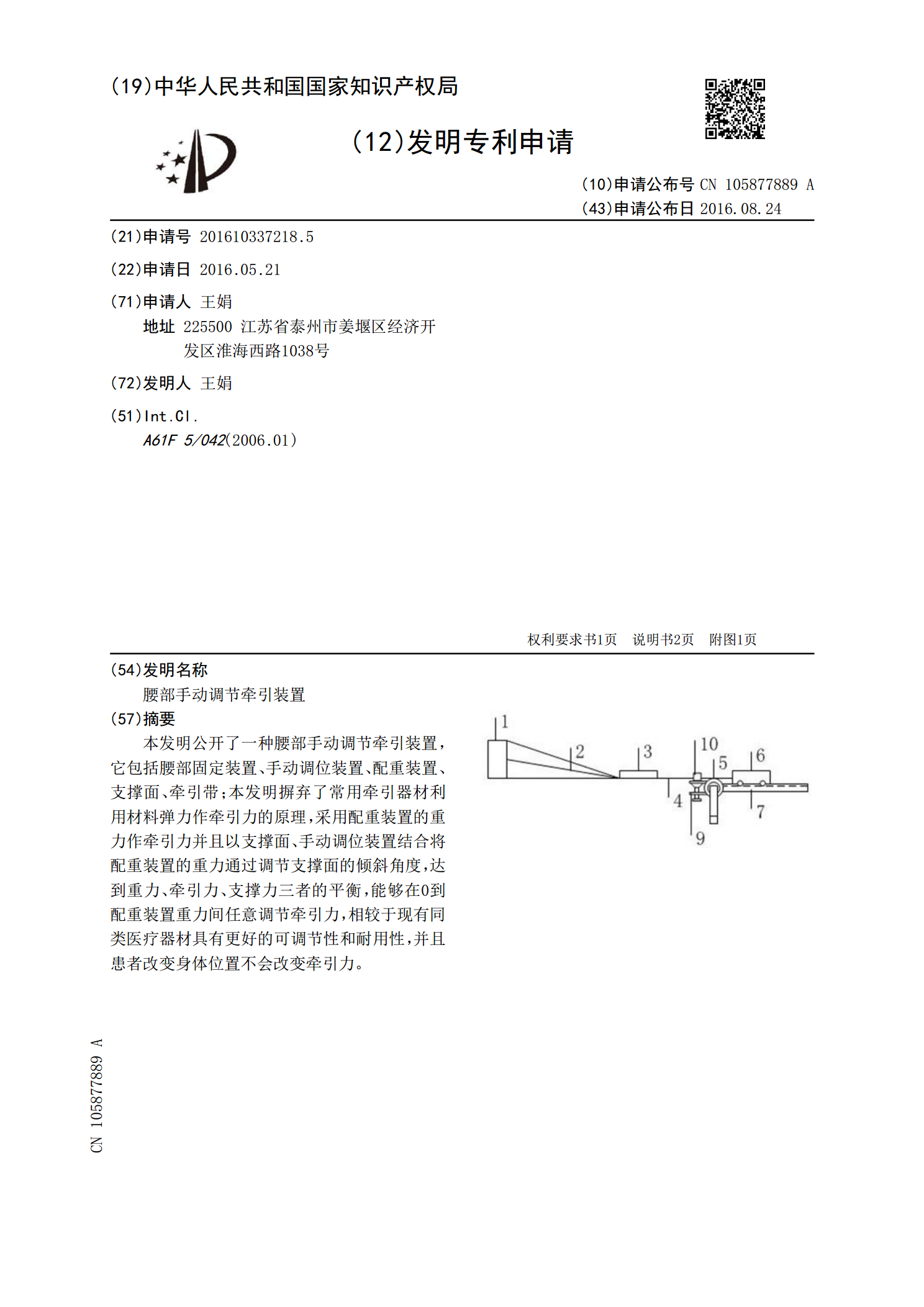
本发明公开了一种腰部手动调节牵引装置,它包括腰部固定装置、手动调位装置、配重装置、支撑面、牵引带;本发明摒弃了常用牵引器材利用材料弹力作牵引力的原理,采用配重装置的重力作牵引力并且以支撑面、手动调位装置结合将配重装置的重力通过调节支撑面的倾斜角度,达到重力、牵引力、支撑力三者的平衡,能够在0到配重装置重力间任意调节牵引力,相较于现有同类医疗器材具有更好的可调节性和耐用性,并且患者改变身体位置不会改变牵引力。