
机器人高速插针机.pdf

Wi****m7


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人高速插针机.pdf
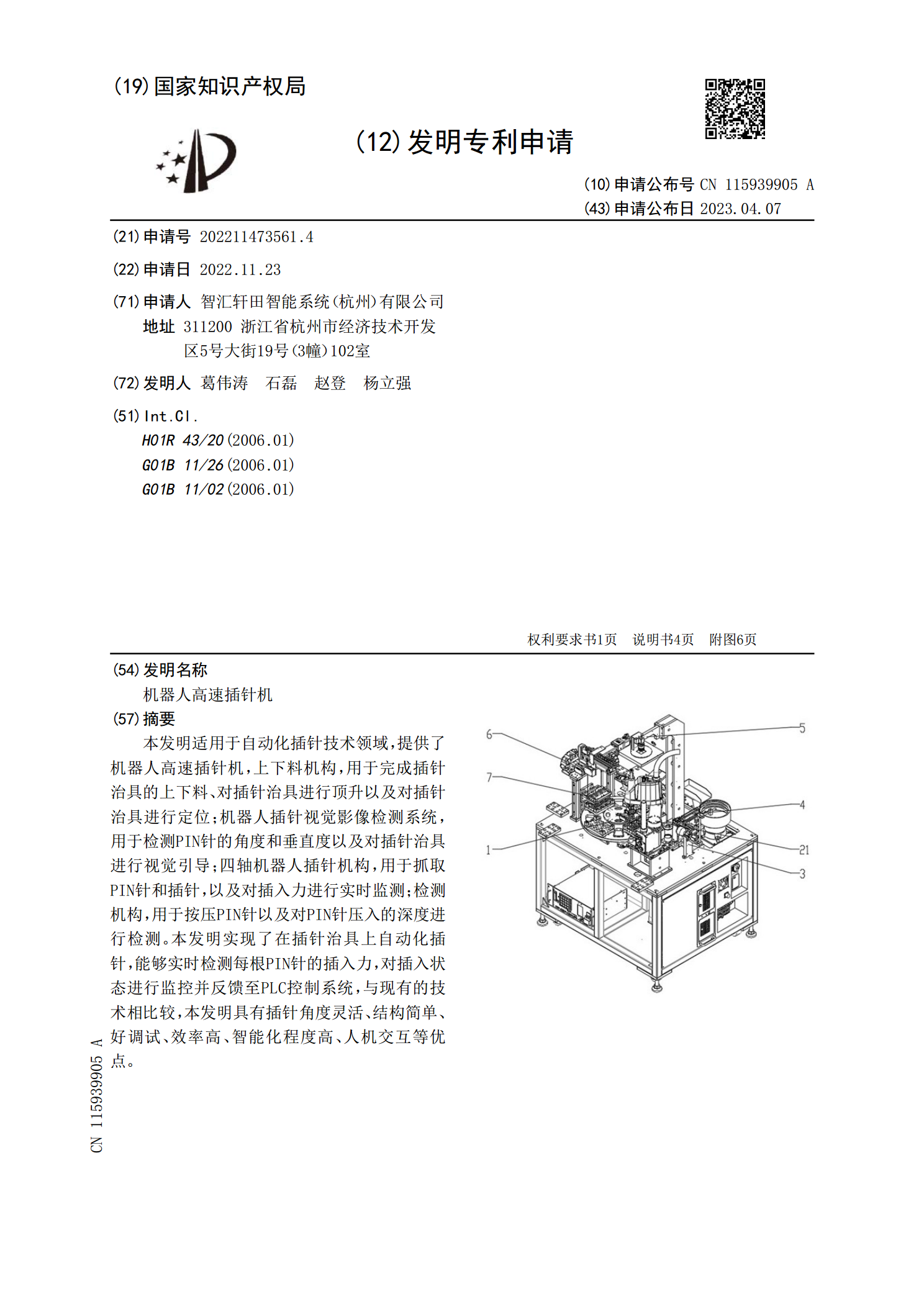
本发明适用于自动化插针技术领域,提供了机器人高速插针机,上下料机构,用于完成插针治具的上下料、对插针治具进行顶升以及对插针治具进行定位;机器人插针视觉影像检测系统,用于检测PIN针的角度和垂直度以及对插针治具进行视觉引导;四轴机器人插针机构,用于抓取PIN针和插针,以及对插入力进行实时监测;检测机构,用于按压PIN针以及对PIN针压入的深度进行检测。本发明实现了在插针治具上自动化插针,能够实时检测每根PIN针的插入力,对插入状态进行监控并反馈至PLC控制系统,与现有的技术相比较,本发明具有插针角度灵活、结

高速凸轮插针机.pdf
本发明公开了一种高速凸轮插针机,包括机体,所述的机体上设有端子输送机构和端子切断机构,其中端子切断机构包括一裁切刀和两夹紧定位装置,两夹紧定位装置分别位于裁切刀下方的左右两侧,每组夹紧定位装置均包括有夹持板、滑移板、摆臂和凸轮,机体上开设有供所述滑移板在其上左右滑移的滑移槽,夹持板固装于滑移板的内端端部上,滑移板的外端与摆臂的一端连接,摆臂的中部铰接固定于机体上,摆臂的另一端与凸轮联动,并由凸轮转动控制其左右摆动,所述的凸轮套装于一凸轮轴上,所述的凸轮轴上还连接有驱动其旋转的驱动电机。由于本发明对端子的夹

航空插头高速插针机.pdf
本发明公开一种航空插头高速插针机。包括,机架、上料装置、移栽机构、端子上料机构以及凸轮插针机构;所述上料装置包括,胶芯上料机构、换轨机构、插胶芯机构、夹头机构以及选向机构。通过胶芯上料机构、换轨机构、插胶芯机构、夹头机构以及选向机构对胶芯进行自动上料、转移、预定角度摆放等,然后,送到凸轮插针机构的侧旁,上料机构对端子料带自动上料,凸轮插针机构高速将端子料带中的端子夹断并插入插槽中,整个加工过程全自动化,生产效率大大提升。使用选向机构的检测端卡入胶芯的定位缺口中进行角度选定,其设计巧妙,结构简单,成本低。使

高速插针装置.pdf
本发明公开了一种高速插针装置,包括产品送料机构和凸轮送料插针机构,所述产品送料机构包括送料支座、第一连接板、第一送料马达、第二送料马达、第一KK模组、第二KK模组、拨爪连接件、第一拨爪、第二拨爪、产品轨道、定位盖板和产品压块,所述送料支架通过第一连接板与第一送料马达、第二送料马达固连,第一送料马达与第一KK模组固连,第二送料马达与第二KK模组固连,所述第二KK模组通过拨爪连接件与第二拨爪固连,所述产品轨道位于第一拨爪顶部,且通过定位盖板与产品压块固连;所述凸轮送料插针机构包括凸轮组组件、料带送料组件、料带

自动插针机.pdf
本发明公开了一种自动插针机,包括端子送料模组、高速凸轮裁切和插针模组、载料托盘送料模组和固定载料托盘的转盘模组,固定载料托盘的转盘模组包括转盘、可分离的载具定位机构和转盘旋转机构,载料托盘送料模组将装载待插针的PCB板的载料托盘输送至转盘上,载料托盘通过可分离的载具定位机构固定,再通过转盘旋转机构驱动以变换放置于该载料托盘上的PCB板的位置来对PCB板的不同位置进行插针作业,具有结构设置简洁、合理,自动化程度高,产品加工效率高,以及产品质量稳定性高等优点。