
一种更换电池模组的拉钩机构及电池模组更换方法.pdf

增梅****主啊

1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种更换电池模组的拉钩机构及电池模组更换方法.pdf
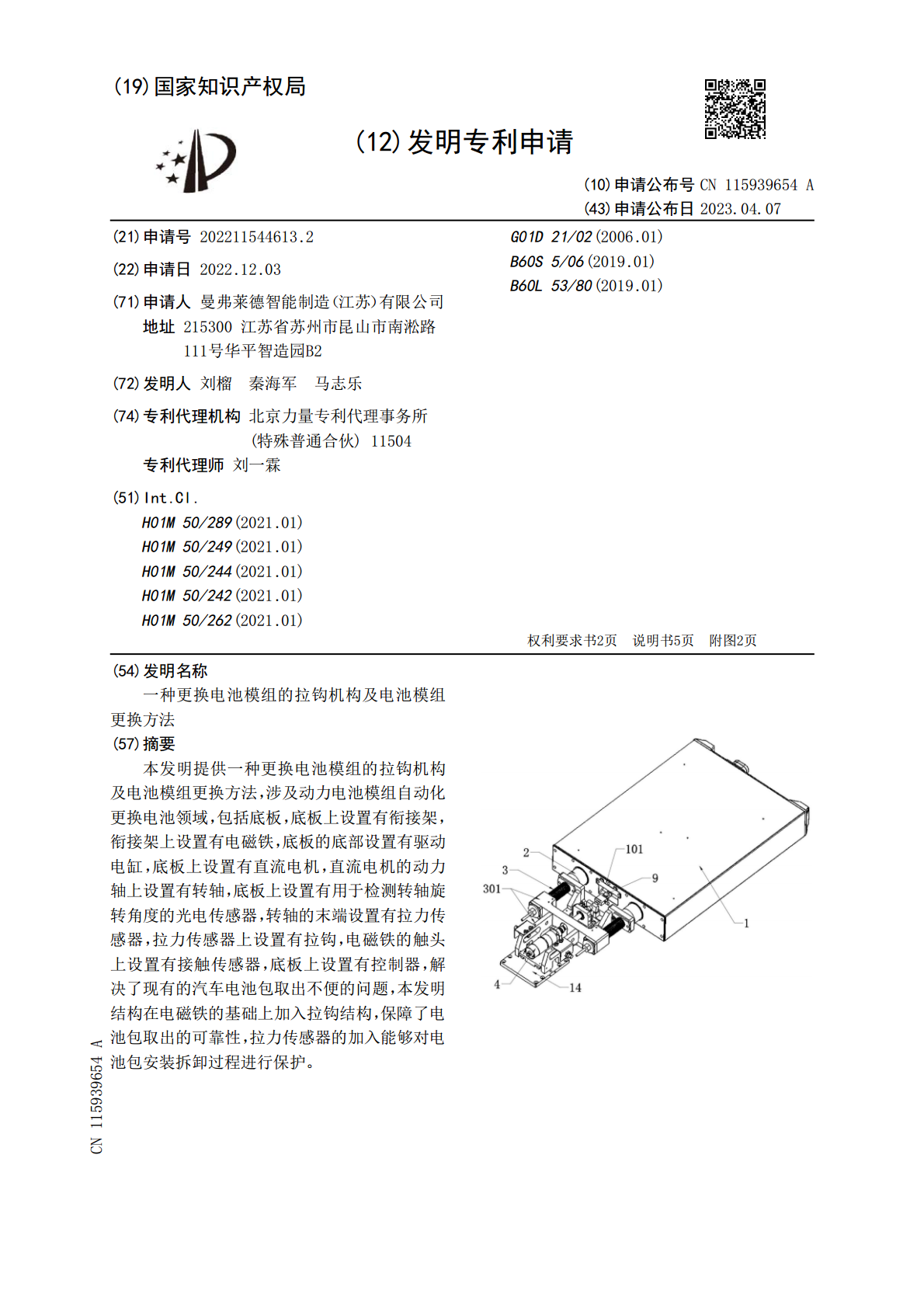
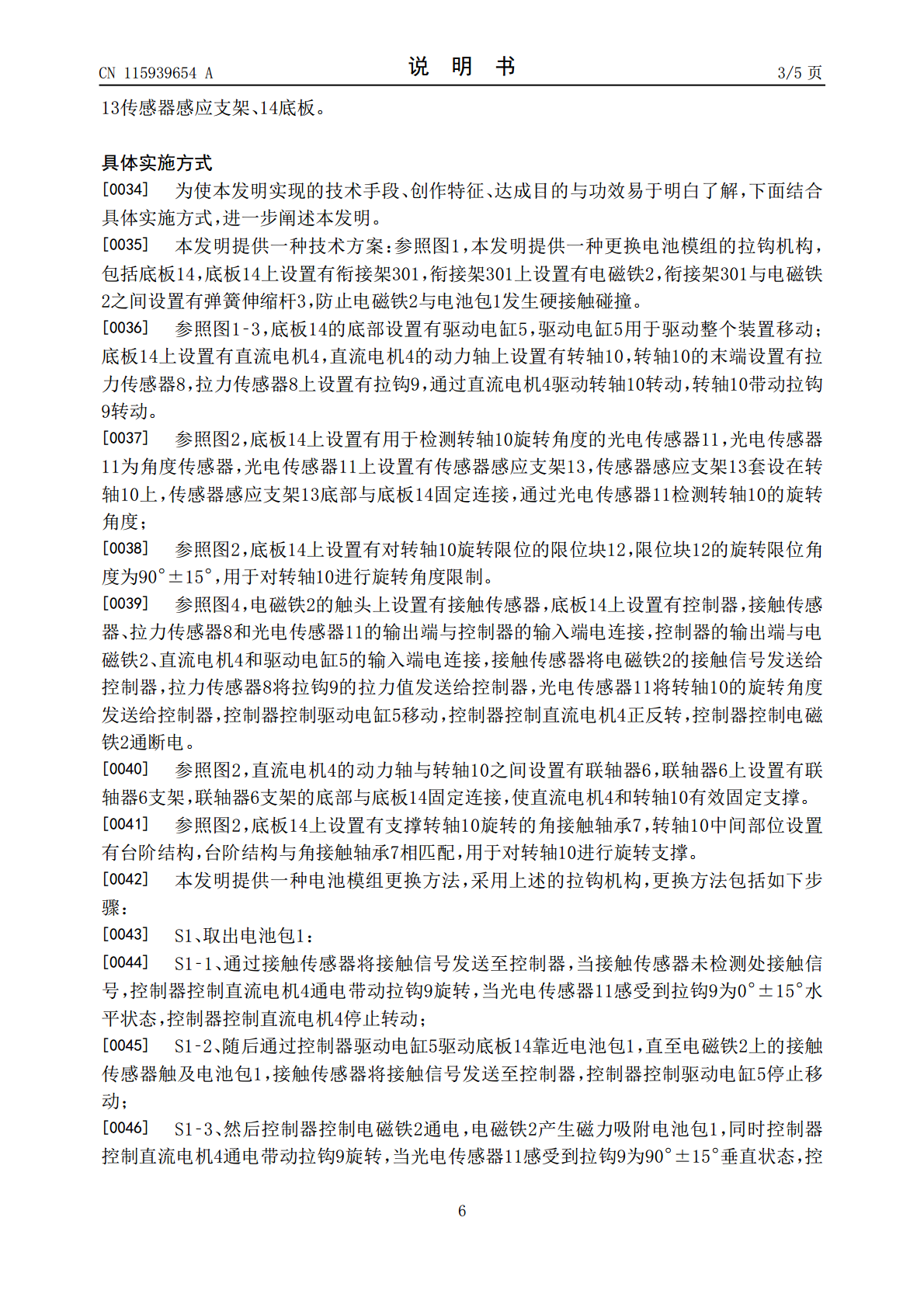
本发明提供一种更换电池模组的拉钩机构及电池模组更换方法,涉及动力电池模组自动化更换电池领域,包括底板,底板上设置有衔接架,衔接架上设置有电磁铁,底板的底部设置有驱动电缸,底板上设置有直流电机,直流电机的动力轴上设置有转轴,底板上设置有用于检测转轴旋转角度的光电传感器,转轴的末端设置有拉力传感器,拉力传感器上设置有拉钩,电磁铁的触头上设置有接触传感器,底板上设置有控制器,解决了现有的汽车电池包取出不便的问题,本发明结构在电磁铁的基础上加入拉钩结构,保障了电池包取出的可靠性,拉力传感器的加入能够对电池包安装拆

可快速更换的电池模组.pdf
本发明公开了一种可快速更换的电池模组,应用于电动轿车。电池模组包括电池本体、电池框架以及固定导向单元。电池本体为扁平状,且固定于电池框架。电池框架两侧分别具有滚轮与固定夹,且还具有位于两侧之间的限位块。固定导向单元固定于电动轿车,且具有固定本体、滑轨以及定位套,滑轨与定位套分别设置于固定本体。当电池框架与固定导向单元结合时,电池框架两侧的滚轮分别位于滑轨内,限位块固定于定位套,固定夹固定于固定本体。本发明提供的电池模组可达成快速更换电池的目的。
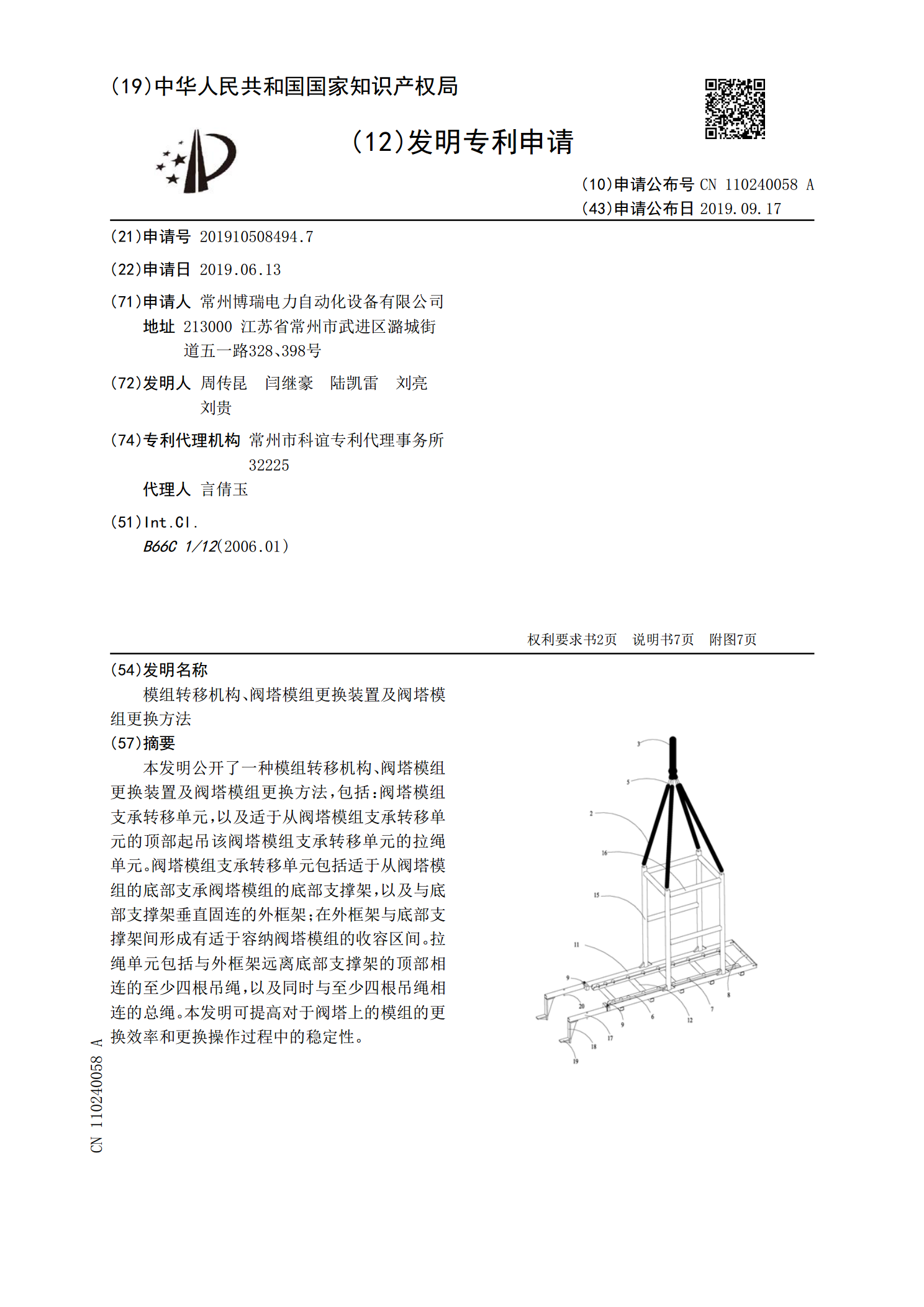
模组转移机构、阀塔模组更换装置及阀塔模组更换方法.pdf
本发明公开了一种模组转移机构、阀塔模组更换装置及阀塔模组更换方法,包括:阀塔模组支承转移单元,以及适于从阀塔模组支承转移单元的顶部起吊该阀塔模组支承转移单元的拉绳单元。阀塔模组支承转移单元包括适于从阀塔模组的底部支承阀塔模组的底部支撑架,以及与底部支撑架垂直固连的外框架;在外框架与底部支撑架间形成有适于容纳阀塔模组的收容区间。拉绳单元包括与外框架远离底部支撑架的顶部相连的至少四根吊绳,以及同时与至少四根吊绳相连的总绳。本发明可提高对于阀塔上的模组的更换效率和更换操作过程中的稳定性。

快速更换模组的电动车辆锂电池.pdf
本发明公开一种快速更换电动车辆锂电池,该锂电池至少由两组锂电池模组快速地串联或并联设置在电输出板上,采用上述方案后,不需要将整个电池箱全部拆出,只要打开固定结构,即可快速将一个锂电池模组从电动车辆上取下,极大的提高了快速换电的效率。
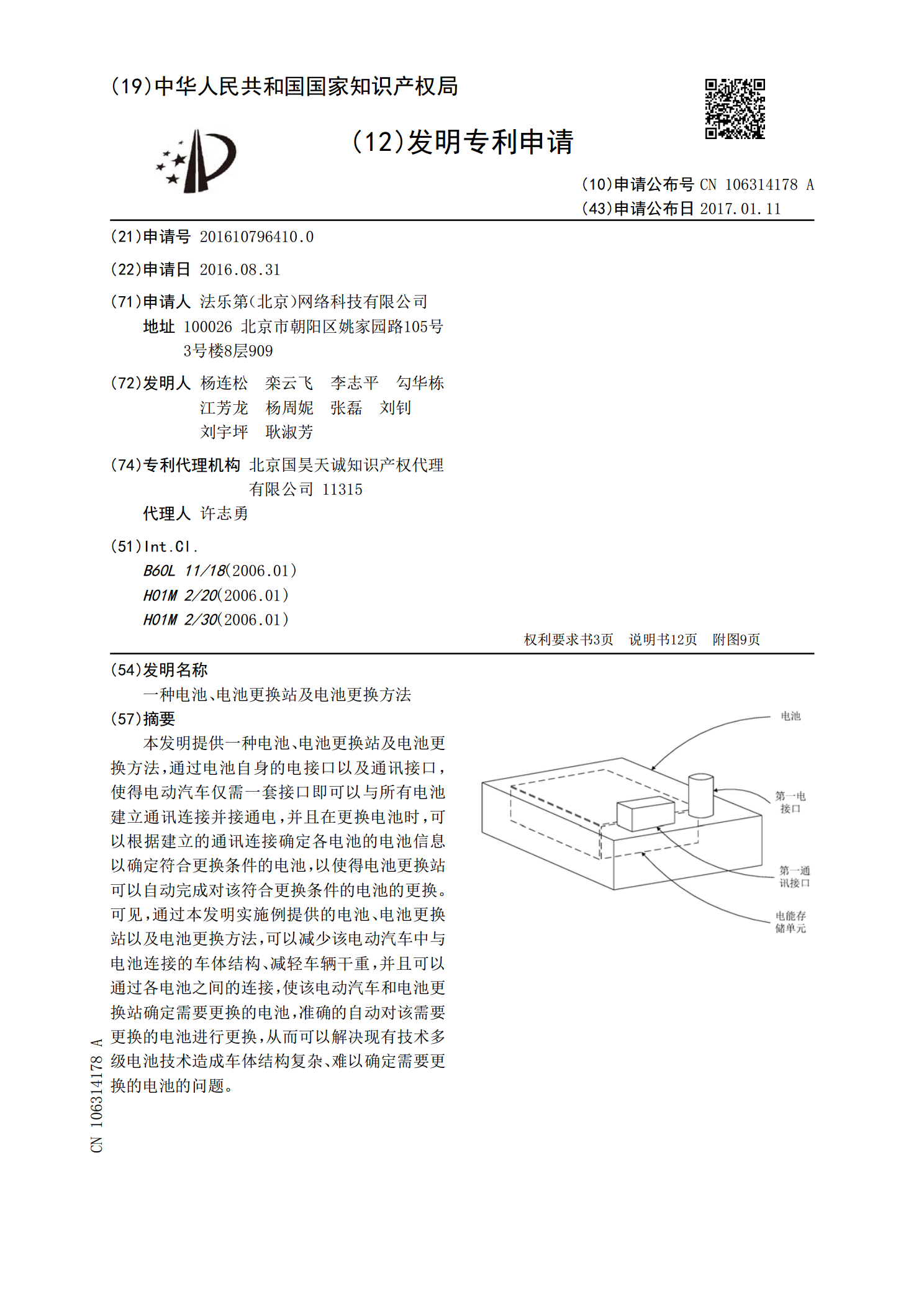
一种电池、电池更换站及电池更换方法.pdf
本发明提供一种电池、电池更换站及电池更换方法,通过电池自身的电接口以及通讯接口,使得电动汽车仅需一套接口即可以与所有电池建立通讯连接并接通电,并且在更换电池时,可以根据建立的通讯连接确定各电池的电池信息以确定符合更换条件的电池,以使得电池更换站可以自动完成对该符合更换条件的电池的更换。可见,通过本发明实施例提供的电池、电池更换站以及电池更换方法,可以减少该电动汽车中与电池连接的车体结构、减轻车辆干重,并且可以通过各电池之间的连接,使该电动汽车和电池更换站确定需要更换的电池,准确的自动对该需要更换的电池进行