
一种基于事件点云的人体姿态估计方法.pdf

文光****iu

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于事件点云的人体姿态估计方法.pdf
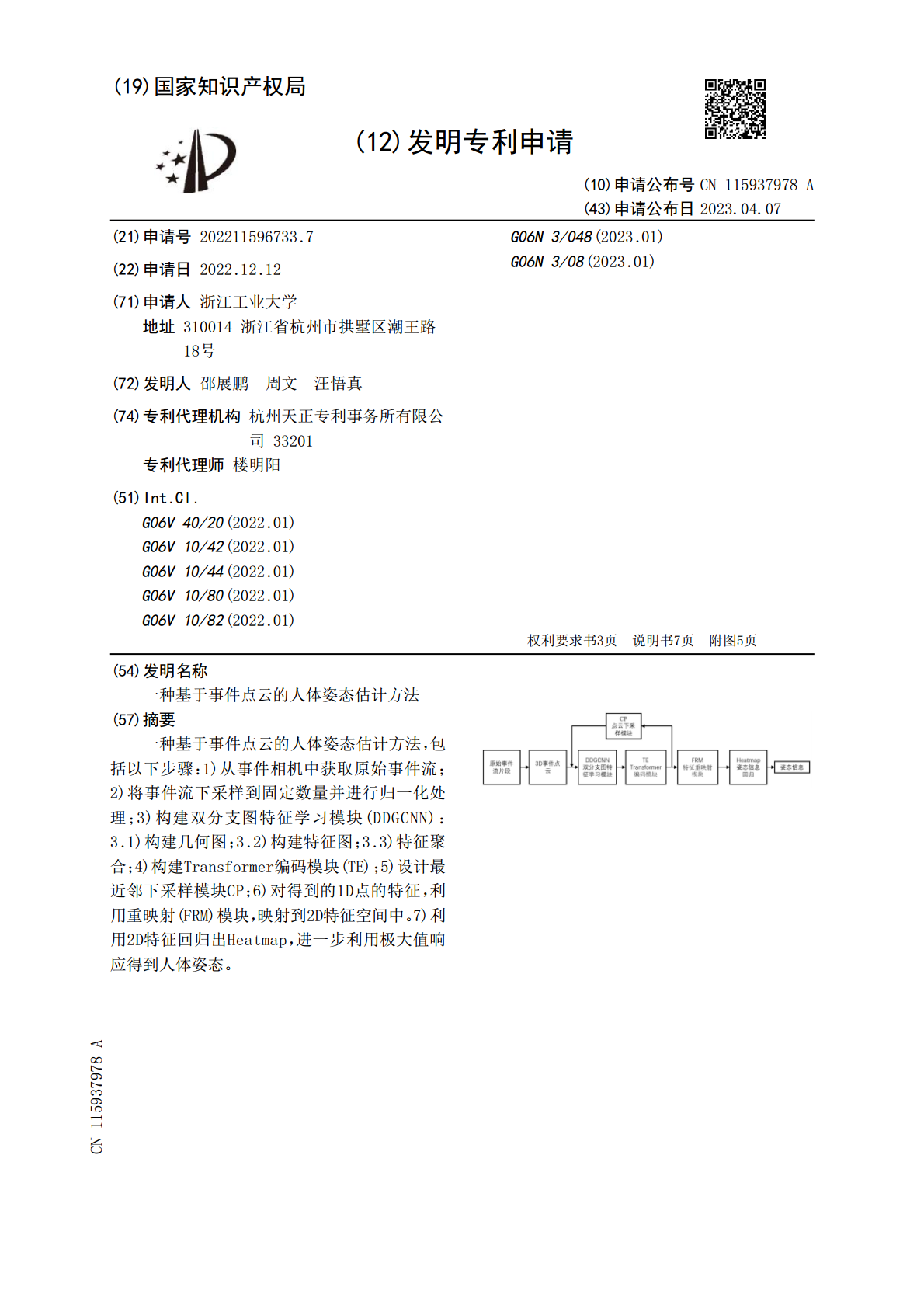
一种基于事件点云的人体姿态估计方法,包括以下步骤:1)从事件相机中获取原始事件流;2)将事件流下采样到固定数量并进行归一化处理;3)构建双分支图特征学习模块(DDGCNN):3.1)构建几何图;3.2)构建特征图;3.3)特征聚合;4)构建Transformer编码模块(TE);5)设计最近邻下采样模块CP;6)对得到的1D点的特征,利用重映射(FRM)模块,映射到2D特征空间中。7)利用2D特征回归出Heatmap,进一步利用极大值响应得到人体姿态。

一种人体图像关键点姿态估计方法.pdf
本发明公开了一种人体图像关键点姿态估计方法,包括:对输入的训练图像预处理,用基于空洞卷积的大感受野特征金字塔网络的行人检测网络对输入图像进行检测;将检测到的人体形成的边界框进行裁剪,只保留框内图像;将裁剪后图像输入到设计的模型中,进行人体姿态关键点估计。本发明可以将含有人体的输入图像进行关键点生成,并且生成估计处理后的图像中生成的人体关键点具有较高精度较好保持了人体的骨架几何信息。

一种人体图像关键点姿态估计方法.pdf
本发明公开一种人体图像关键点姿态估计方法。包括步骤:对输入的训练图像预处理,用基于特征金字塔网络的行人检测网络对输入图像进行检测;将检测到的人体形成的边界框进行裁剪,只保留框内图像;将裁剪后图像输入到设计的模型中,进行人体姿态关键点估计。本发明可以将含有人体的输入图像进行关键点生成,并且生成估计处理后的图像中生成的人体关键点具有较高精度,较好保持了人体的骨架几何信息。

基于级联纠错机制的人体姿态估计方法.pdf
本发明公开了一种基于级联纠错机制的人体姿态追踪方法,主要解决现有技术对人体姿态估计中手腕定位不准确的问题。其包括:1)利用双向树结构模型定位手腕以外的身体各关节点;2)利用光流和粒子滤波初步预测手腕的位置;3)通过光流响应判断初步检测的结果是否可靠,若不可靠,则利用双向图结构模型来定位手腕的位置;4)利用肤色模型来判断双向图结构模型的定位结果是否可靠;5)若双向树结构模型的定位结果不正确,则再利用上一帧的手腕位置估计当前帧的手腕位置。实验结果表明,本发明能更精确地定位手腕的位置,从而取得更好的人体姿态估计

人体姿态估计方法及设备.pdf
本申请提供了一种人体姿态估计方法及设备,能够将第二人体姿态估计模型所得到的人体关键点第二信息用于指导第一人体姿态估计模型的模型训练,从而以知识蒸馏的方式将第二人体姿态估计模型学习到的人体关键点知识传授给第一人体姿态估计模型,从而提高了第一人体姿态估计模型的人体关键点估计精度,同时保留了第一姿态估计模型较快的测试速度,能够实现实时的人体姿态估计。