
一种基于频域分块IPNLMS的回声消除装置及回声消除方法.pdf

文宣****66


1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于频域分块IPNLMS的回声消除装置及回声消除方法.pdf
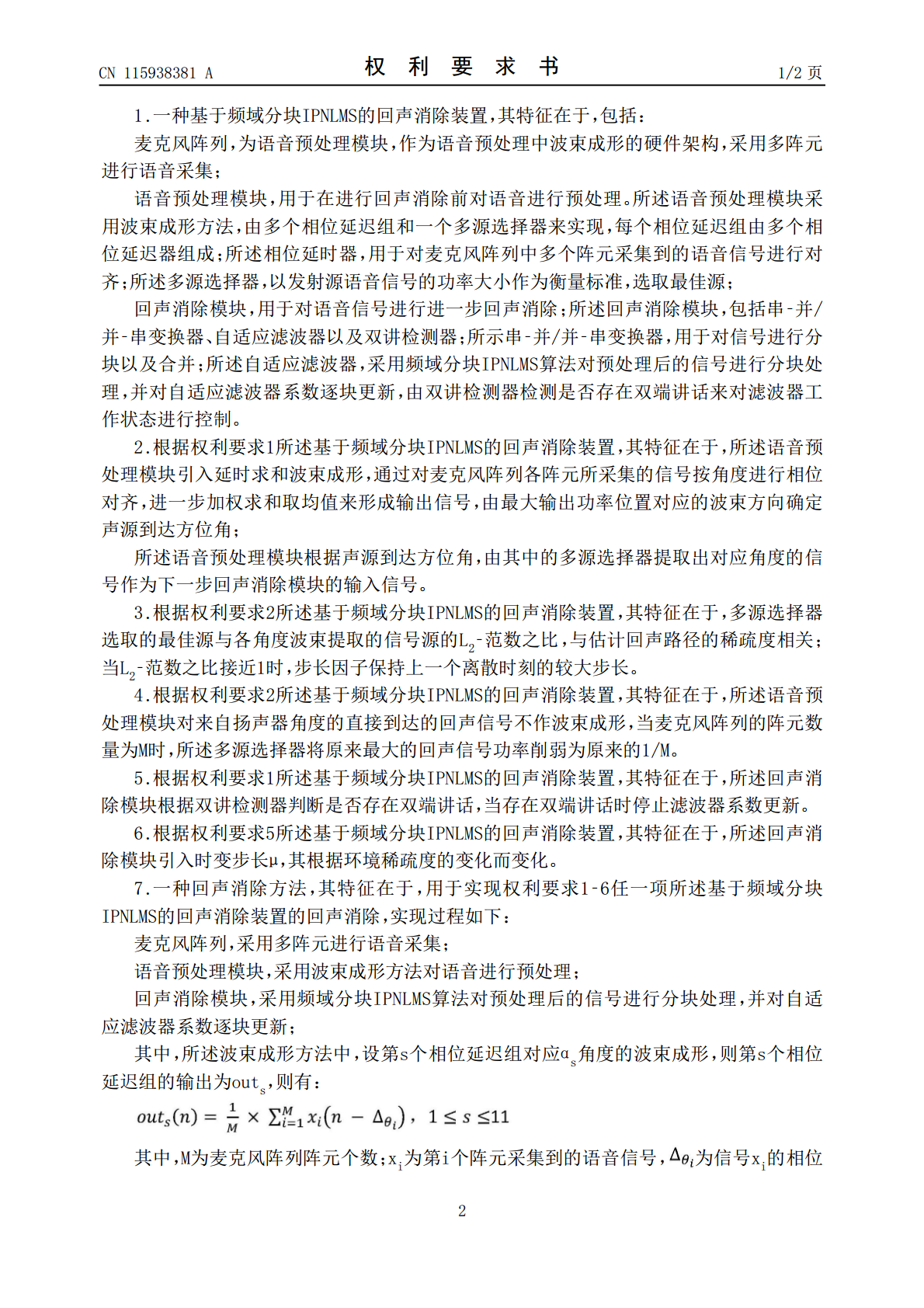
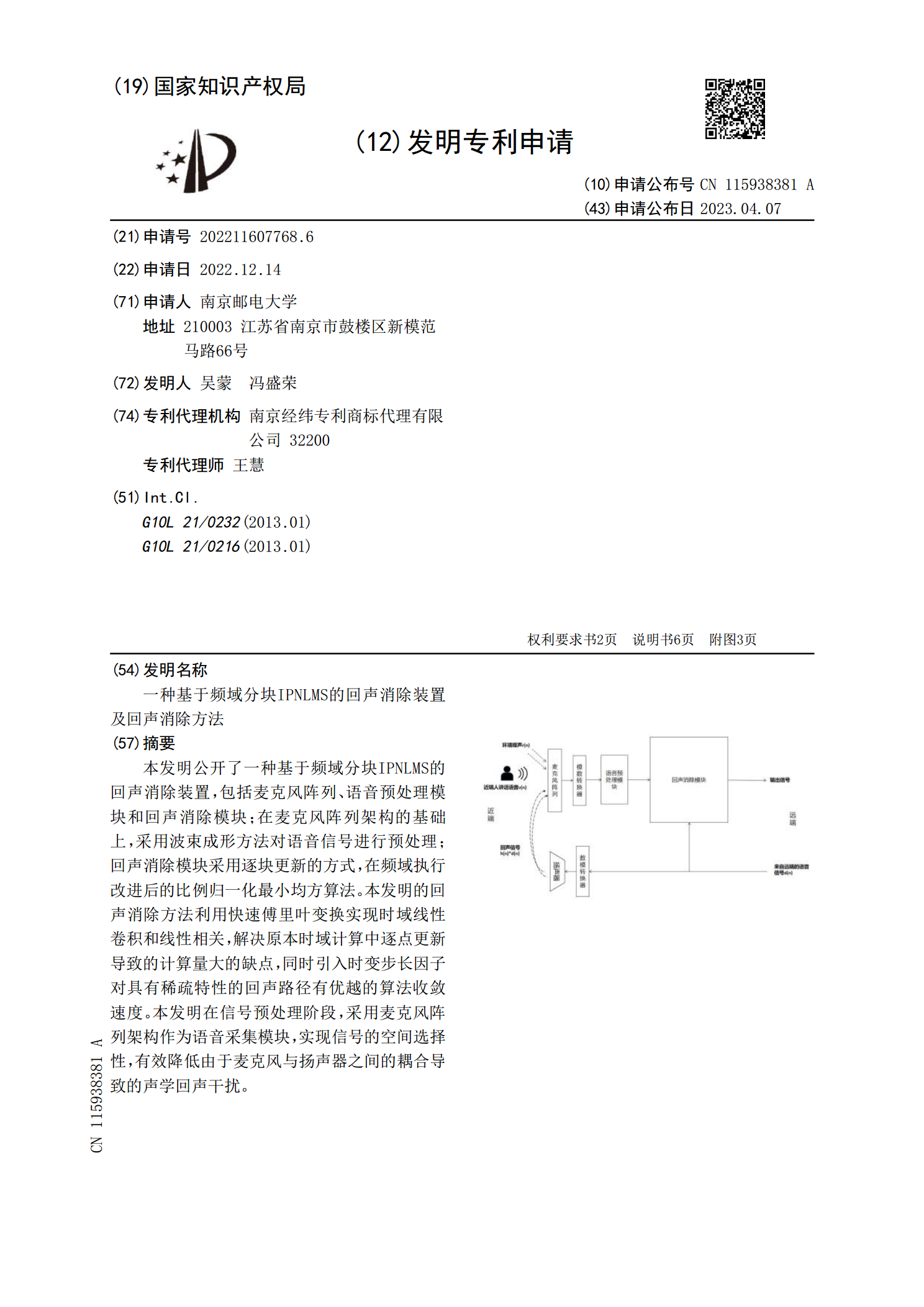
本发明公开了一种基于频域分块IPNLMS的回声消除装置,包括麦克风阵列、语音预处理模块和回声消除模块;在麦克风阵列架构的基础上,采用波束成形方法对语音信号进行预处理;回声消除模块采用逐块更新的方式,在频域执行改进后的比例归一化最小均方算法。本发明的回声消除方法利用快速傅里叶变换实现时域线性卷积和线性相关,解决原本时域计算中逐点更新导致的计算量大的缺点,同时引入时变步长因子对具有稀疏特性的回声路径有优越的算法收敛速度。本发明在信号预处理阶段,采用麦克风阵列架构作为语音采集模块,实现信号的空间选择性,有效降低

时频域联合回声消除装置及方法.pdf
本发明公开一种时频域联合回声消除方法,包括:接收输入的受话器信号和送话器信号;利用第一回声消除器,即时域回声消除器和频域回声消除器中的一个,基于所接收的受话器信号,对所接收到的送话器信号进行回声消除,以得到第一回声消除信号;利用第二回声消除器,即时域回声消除器和频域回声消除器中的另一个,基于所接收到的受话器信号,对第一回声消除信号再次进行回声消除,以得到第二回声消除信号;其中,第二回声消除器的第二滤波器的滤波器参数是基于受话器信号和第二回声消除信号更新,第一和第二回声消除器分别包括相应的第一和第二滤波器。

基于通道聚合度频域回声消除方法.pdf
本发明公开了一种基于通道聚合度频域回声消除方法,包括以下步骤:步骤1、麦克风通道聚合度评估,去除冗余信息;步骤2、回声响应函数估计及回声消除;步骤3、系统噪声消除及目标语音增强。本发明采用频域滤波器,可以适应于长混响情况下,回声残留能量低,语音扭曲小;可以同时抑制多通道回声和系统的平稳噪声,语音通讯质量更高;增加了语音扭曲抑制模块,可以处理双端说话人同时说话的应用场景,语音纯净度更高。

一种频域自适应回声消除方法.pdf
本发明公开了一种频域自适应回声消除方法,包括:根据发音单元的参考信号x(k)通过自适应滤波器估计回声信号y(k);根据所述y(k)和麦克风拾取的信号d(k)计算残留信号e(k);计算频域参考信号X(f)的功率谱xPow(f);计算频域残留信号E(f)的功率谱ePow(f);计算所述E(f)的共轭残留信号E

回声消除模型的训练方法和装置及回声消除方法和装置.pdf
本公开关于一种回声消除模型的训练方法和装置及回声消除方法和装置,训练方法包括:根据近端信号,得到第一信号;将第一信号输入回声消除模型,并基于回声消除模型的输出得到第二信号,其中,第二信号是第一信号经过回声消除后的预测信号;根据第一信号和第二信号,确定回声消除模型的预测损失,其中,预测损失包括第一预测损失,第一预测损失是基于从第二信号分离出的残留回声分量和语音信号分量计算得到;根据预测损失调整回声消除模型的参数。根据本公开的回声消除模型的训练方法和装置及回声消除方法和装置,能够对残留回声进行额外的抑制,提高