
一种混合动力水面清洁机器人.pdf

悠柔****找我


1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种混合动力水面清洁机器人.pdf
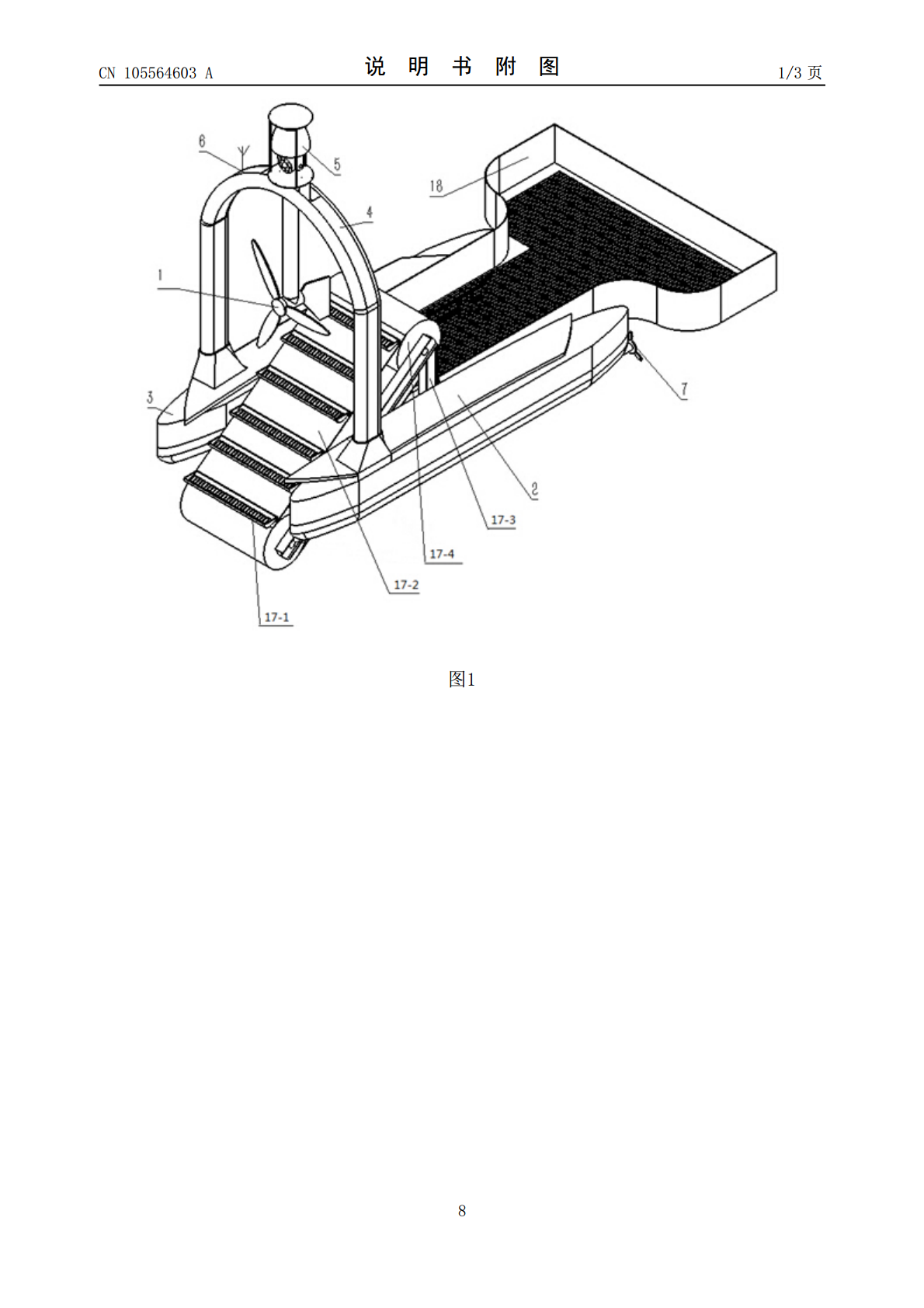
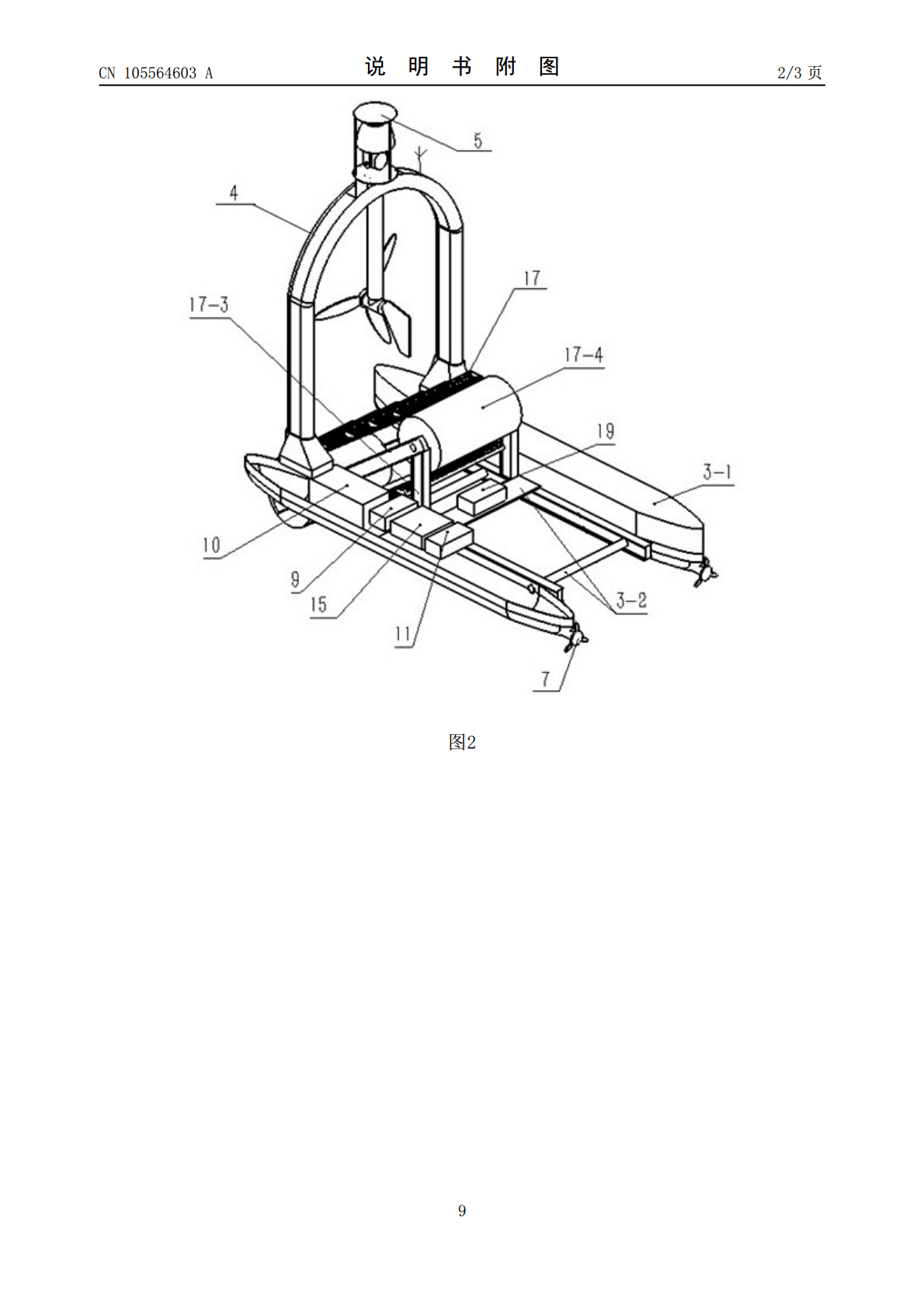
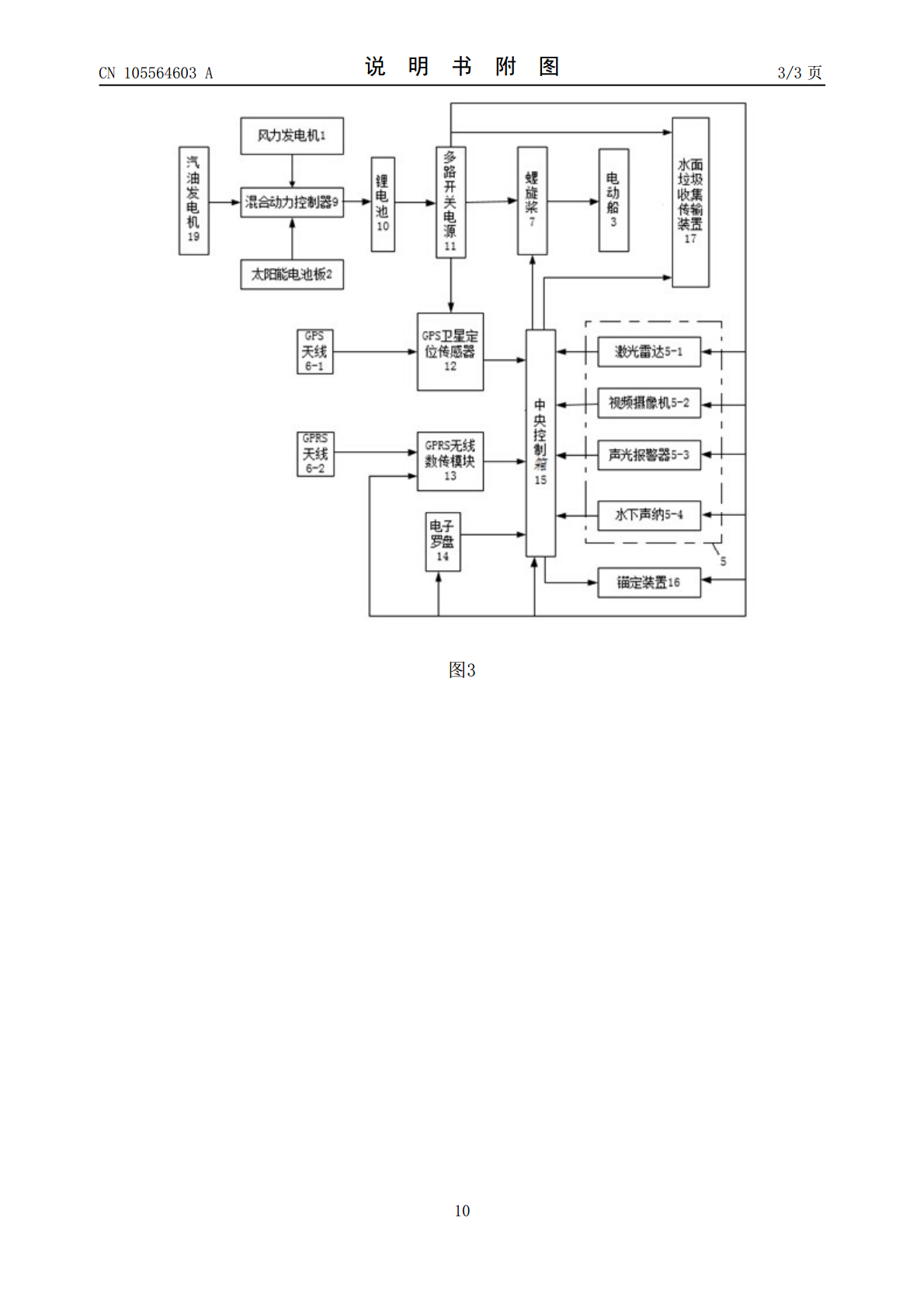
本发明公开了一种混合动力水面清洁机器人,包括电动船,所述电动船上设有螺旋桨、锚定装置、导航系统、电子罗盘和中央控制箱,所述电动船的两侧外表面平铺太阳能电池板,所述电动船上端固设有半环形支撑架,半环形支撑架的下方悬挂有风力发电机、顶端固设避障检测装置和传输天线;电动船的船舱内固设有汽油发电机;太阳能电池板、风力发电机和汽油发电机的输出端均通过混合动力控制器与锂电池连接,锂电池的输出端通过多路开关电源与螺旋桨连接;电动船的前端设有水面垃圾收集传输装置、后端挂接有垃圾储存箱体。采用风能、光能和汽油发电混合型动力
一种水面清洁机器人.pdf
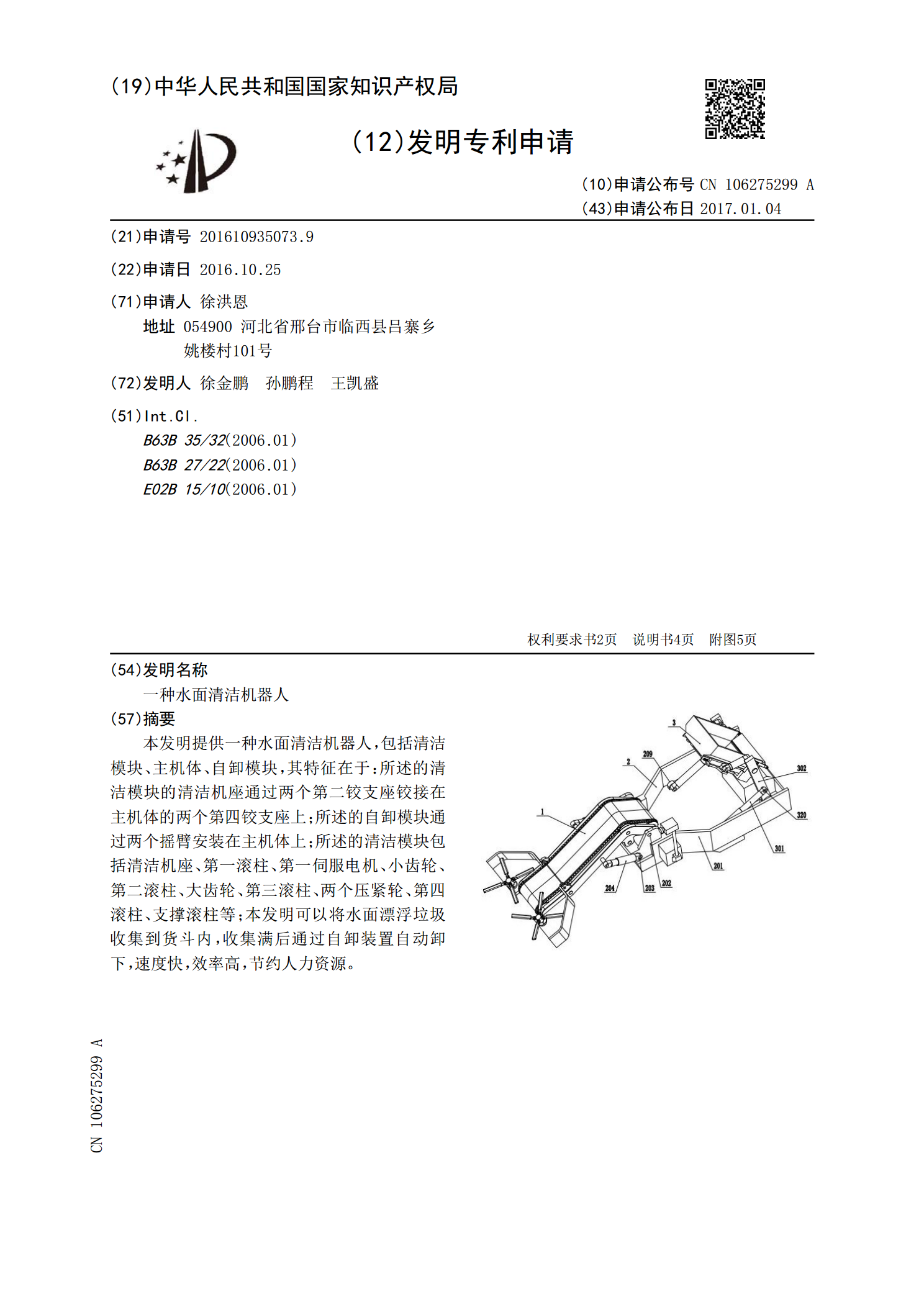
本发明提供一种水面清洁机器人,包括清洁模块、主机体、自卸模块,其特征在于:所述的清洁模块的清洁机座通过两个第二铰支座铰接在主机体的两个第四铰支座上;所述的自卸模块通过两个摇臂安装在主机体上;所述的清洁模块包括清洁机座、第一滚柱、第一伺服电机、小齿轮、第二滚柱、大齿轮、第三滚柱、两个压紧轮、第四滚柱、支撑滚柱等;本发明可以将水面漂浮垃圾收集到货斗内,收集满后通过自卸装置自动卸下,速度快,效率高,节约人力资源。

一种用于水面垃圾清洁与分类的水面机器人及分类打捞方法.pdf
本发明公开了一种用于水面垃圾清洁与分类的水面机器人及分类打捞方法,包括电动船的船体,所述船体的内部设置有垃圾仓,垃圾仓内拆卸式安装有分类垃圾桶;船体一端的底部安装有垃圾收集传输装置,垃圾收集传输装置的一端位于垃圾仓内并与分类垃圾桶的位置相对应、另一端伸出船体的外部;垃圾收集传输装置的包括转动连接在船体上的支撑架,所述支撑架的表面铺设有一圈传送带,所述传送带表面开设有栅格;所述支撑架连接有升降装置驱使其一端做上下运动,所述传送带连接有转动装置使其转动;位于船体外部的支撑架端部两侧分别固设有固定挡板;位于传送
一种河道水面清洁装置.pdf
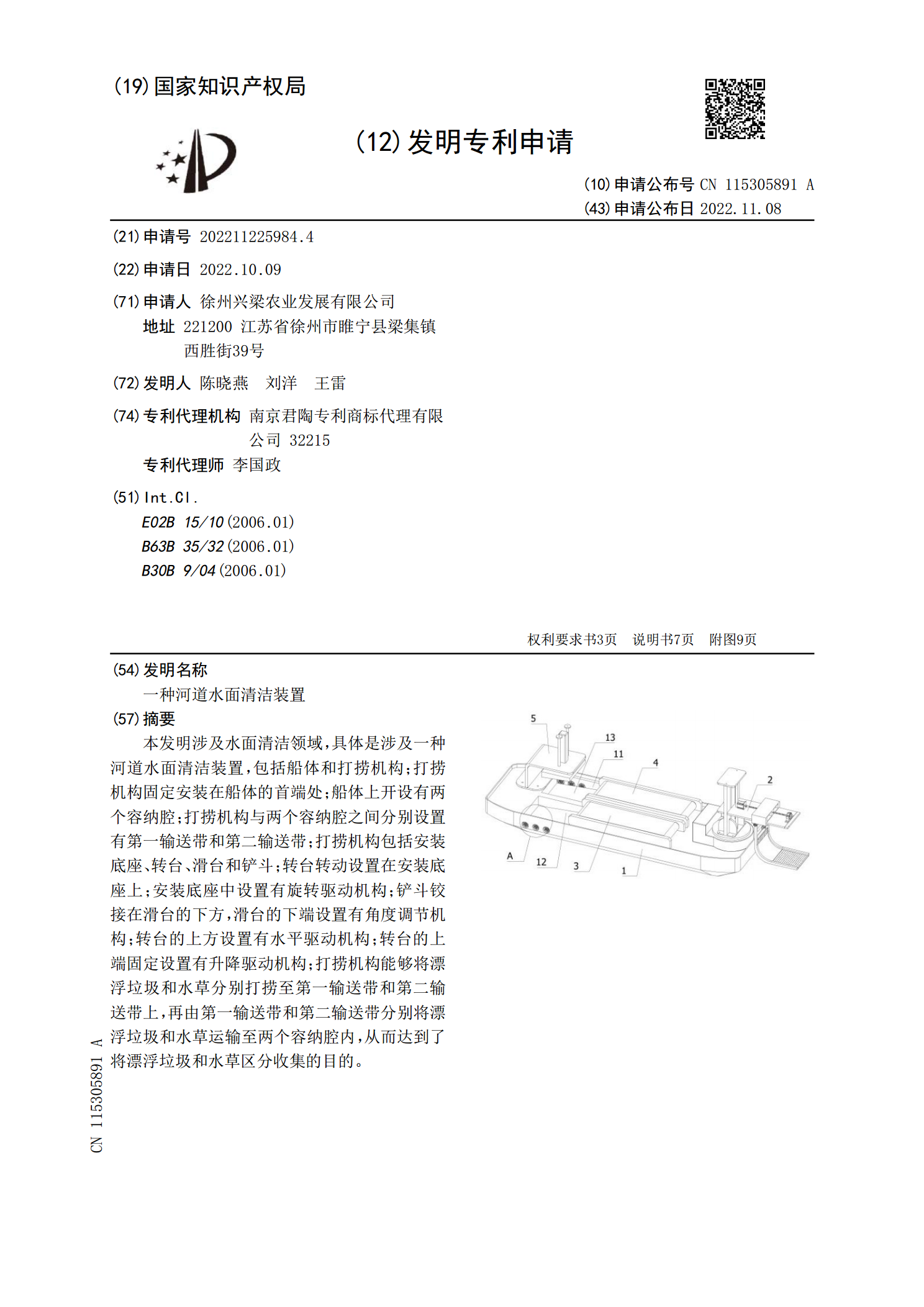
本发明涉及水面清洁领域,具体是涉及一种河道水面清洁装置,包括船体和打捞机构;打捞机构固定安装在船体的首端处;船体上开设有两个容纳腔;打捞机构与两个容纳腔之间分别设置有第一输送带和第二输送带;打捞机构包括安装底座、转台、滑台和铲斗;转台转动设置在安装底座上;安装底座中设置有旋转驱动机构;铲斗铰接在滑台的下方,滑台的下端设置有角度调节机构;转台的上方设置有水平驱动机构;转台的上端固定设置有升降驱动机构;打捞机构能够将漂浮垃圾和水草分别打捞至第一输送带和第二输送带上,再由第一输送带和第二输送带分别将漂浮垃圾和水
一种河道水面清洁装置.pdf
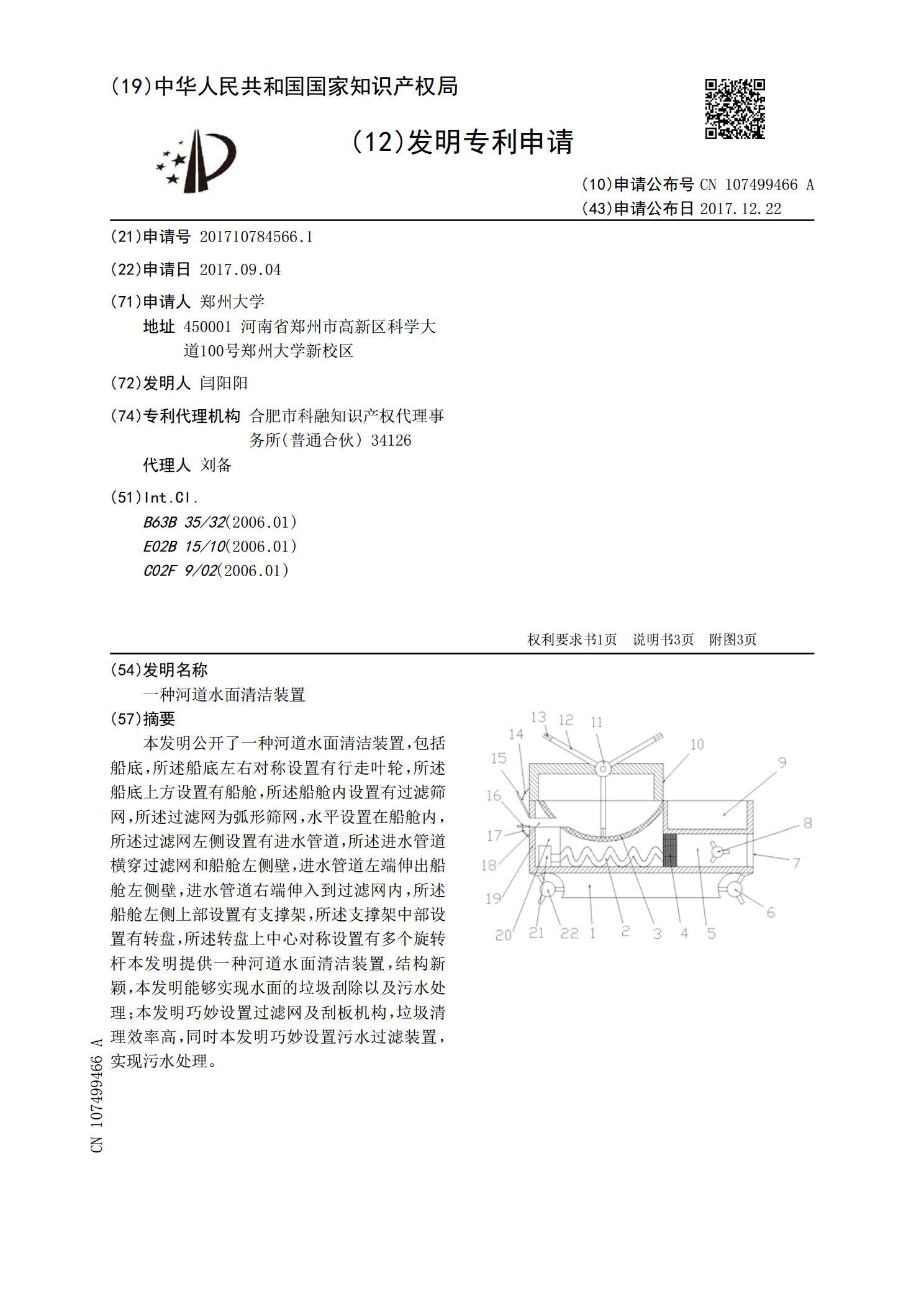
本发明公开了一种河道水面清洁装置,包括船底,所述船底左右对称设置有行走叶轮,所述船底上方设置有船舱,所述船舱内设置有过滤筛网,所述过滤网为弧形筛网,水平设置在船舱内,所述过滤网左侧设置有进水管道,所述进水管道横穿过滤网和船舱左侧壁,进水管道左端伸出船舱左侧壁,进水管道右端伸入到过滤网内,所述船舱左侧上部设置有支撑架,所述支撑架中部设置有转盘,所述转盘上中心对称设置有多个旋转杆本发明提供一种河道水面清洁装置,结构新颖,本发明能够实现水面的垃圾刮除以及污水处理;本发明巧妙设置过滤网及刮板机构,垃圾清理效率高,