
一种用于水面垃圾清洁与分类的水面机器人及分类打捞方法.pdf

东耀****哥哥


1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于水面垃圾清洁与分类的水面机器人及分类打捞方法.pdf
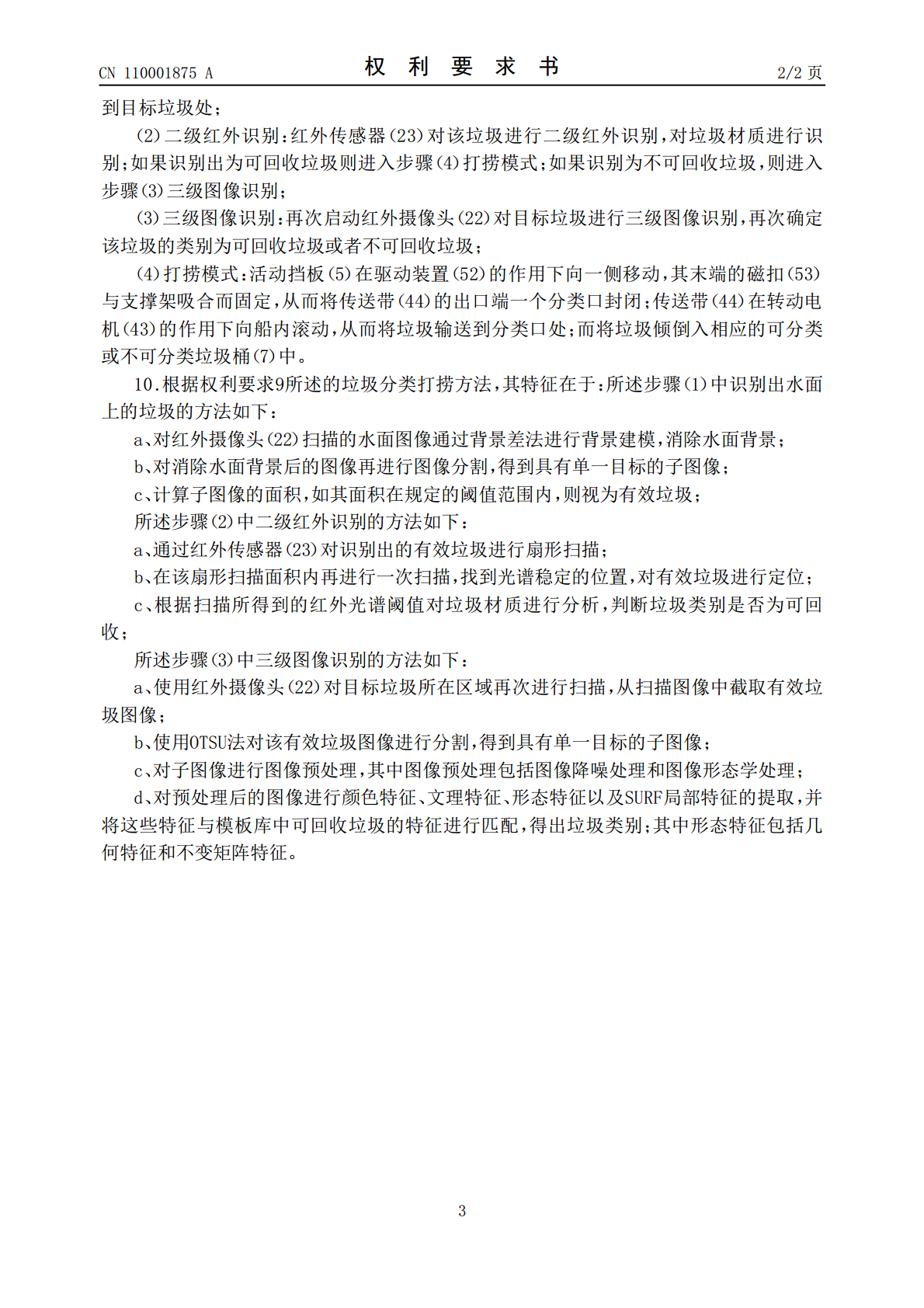
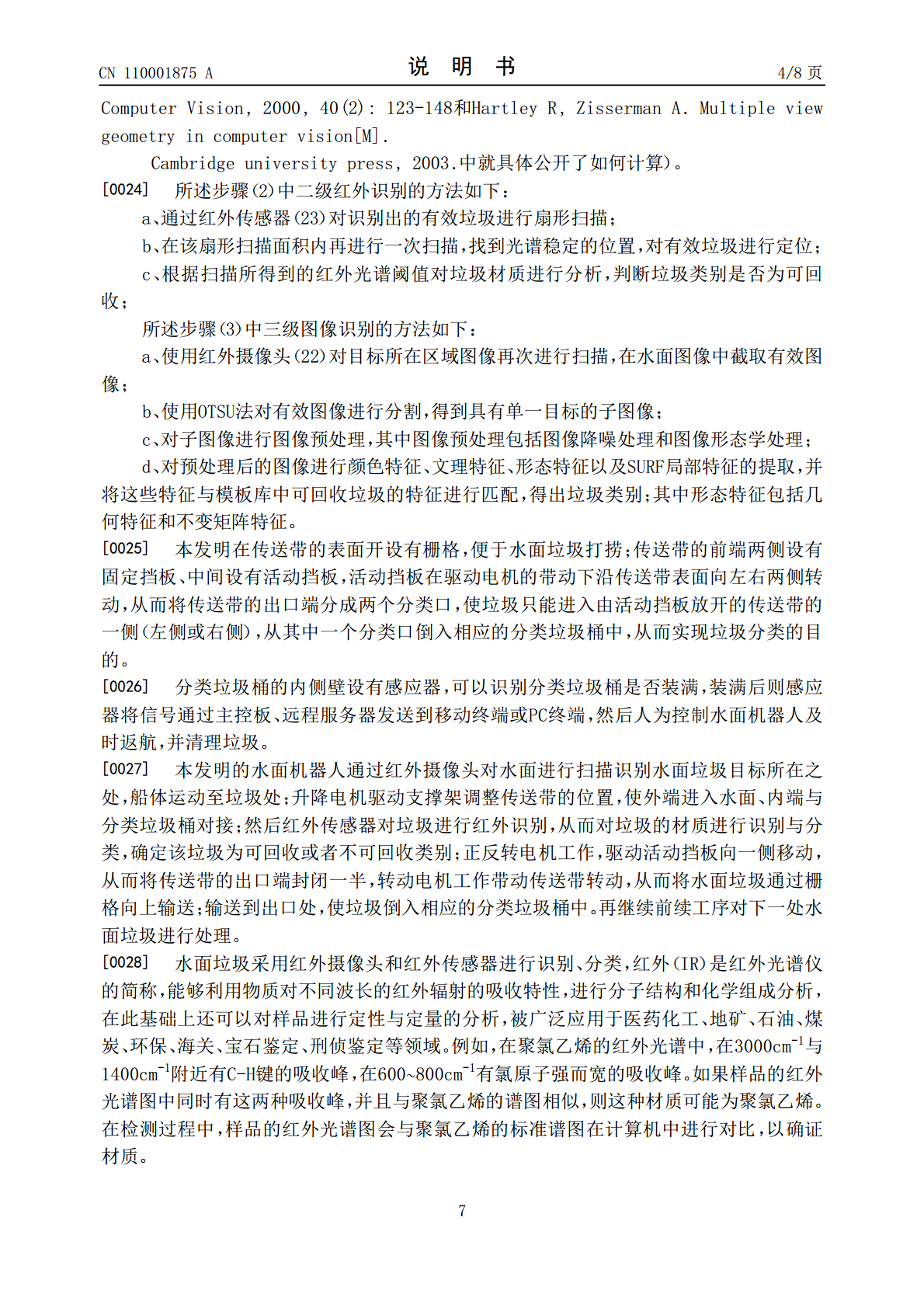
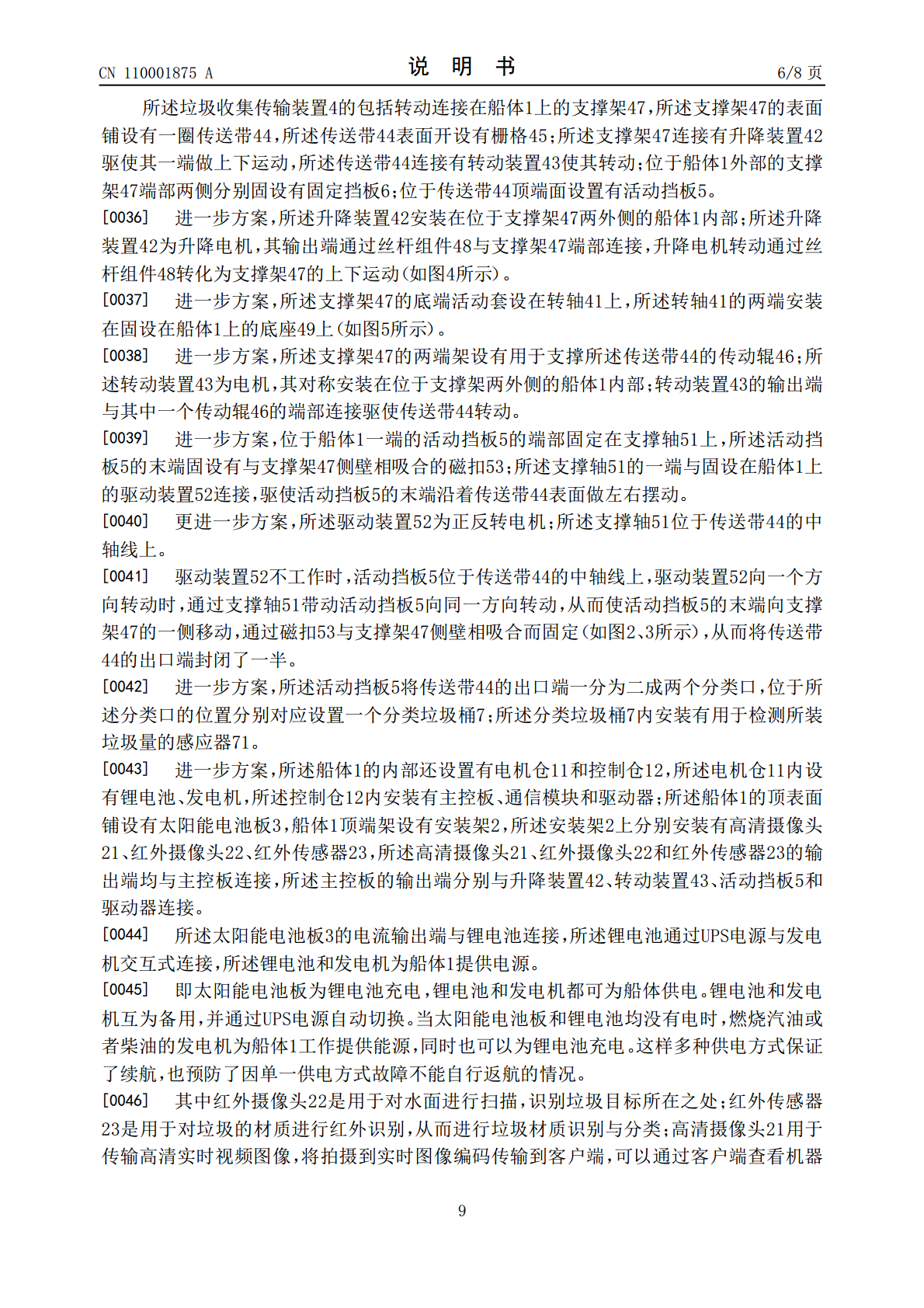
本发明公开了一种用于水面垃圾清洁与分类的水面机器人及分类打捞方法,包括电动船的船体,所述船体的内部设置有垃圾仓,垃圾仓内拆卸式安装有分类垃圾桶;船体一端的底部安装有垃圾收集传输装置,垃圾收集传输装置的一端位于垃圾仓内并与分类垃圾桶的位置相对应、另一端伸出船体的外部;垃圾收集传输装置的包括转动连接在船体上的支撑架,所述支撑架的表面铺设有一圈传送带,所述传送带表面开设有栅格;所述支撑架连接有升降装置驱使其一端做上下运动,所述传送带连接有转动装置使其转动;位于船体外部的支撑架端部两侧分别固设有固定挡板;位于传送
一种用于水面垃圾打捞的装置.pdf
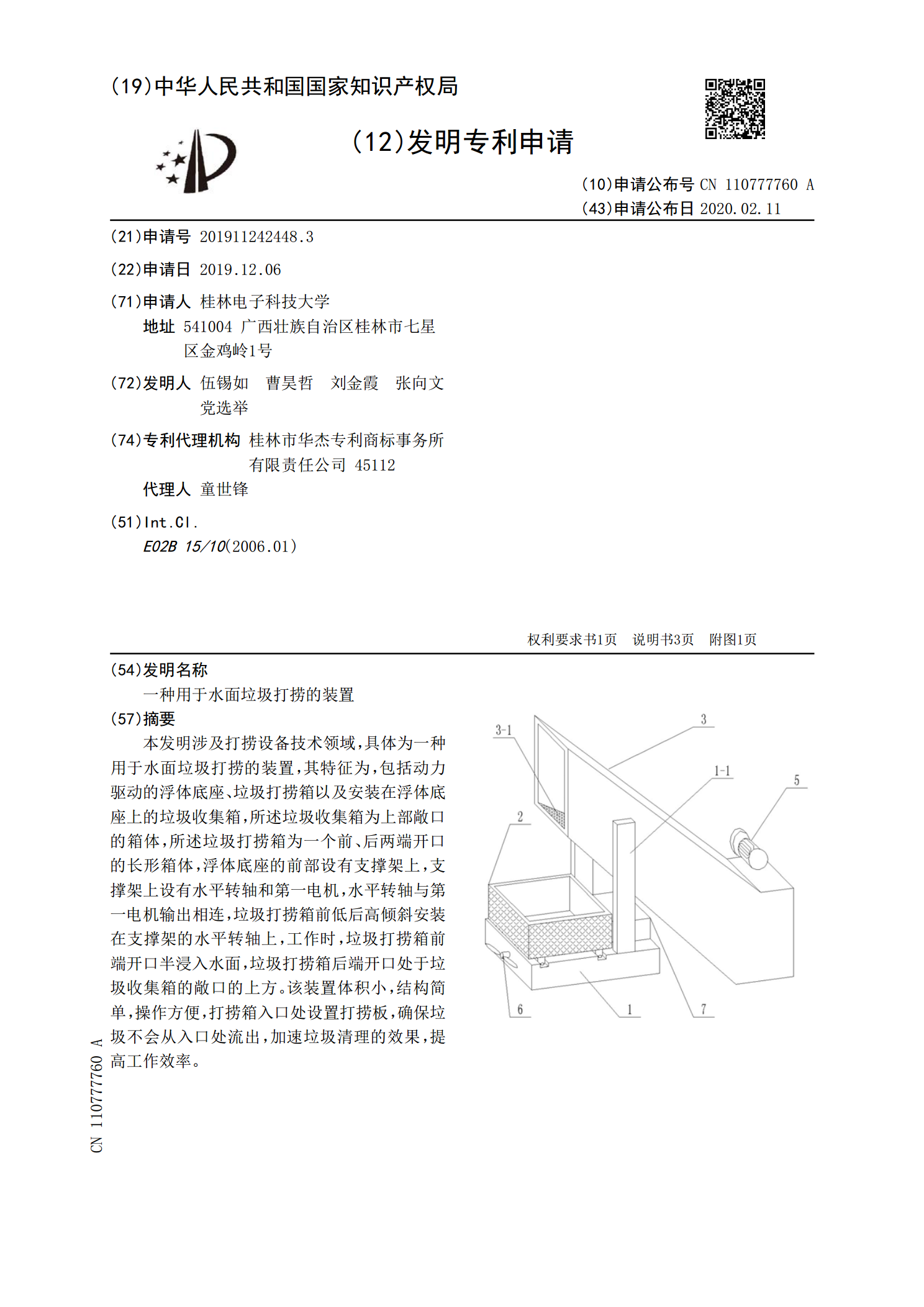
本发明涉及打捞设备技术领域,具体为一种用于水面垃圾打捞的装置,其特征为,包括动力驱动的浮体底座、垃圾打捞箱以及安装在浮体底座上的垃圾收集箱,所述垃圾收集箱为上部敞口的箱体,所述垃圾打捞箱为一个前、后两端开口的长形箱体,浮体底座的前部设有支撑架上,支撑架上设有水平转轴和第一电机,水平转轴与第一电机输出相连,垃圾打捞箱前低后高倾斜安装在支撑架的水平转轴上,工作时,垃圾打捞箱前端开口半浸入水面,垃圾打捞箱后端开口处于垃圾收集箱的敞口的上方。该装置体积小,结构简单,操作方便,打捞箱入口处设置打捞板,确保垃圾不会从
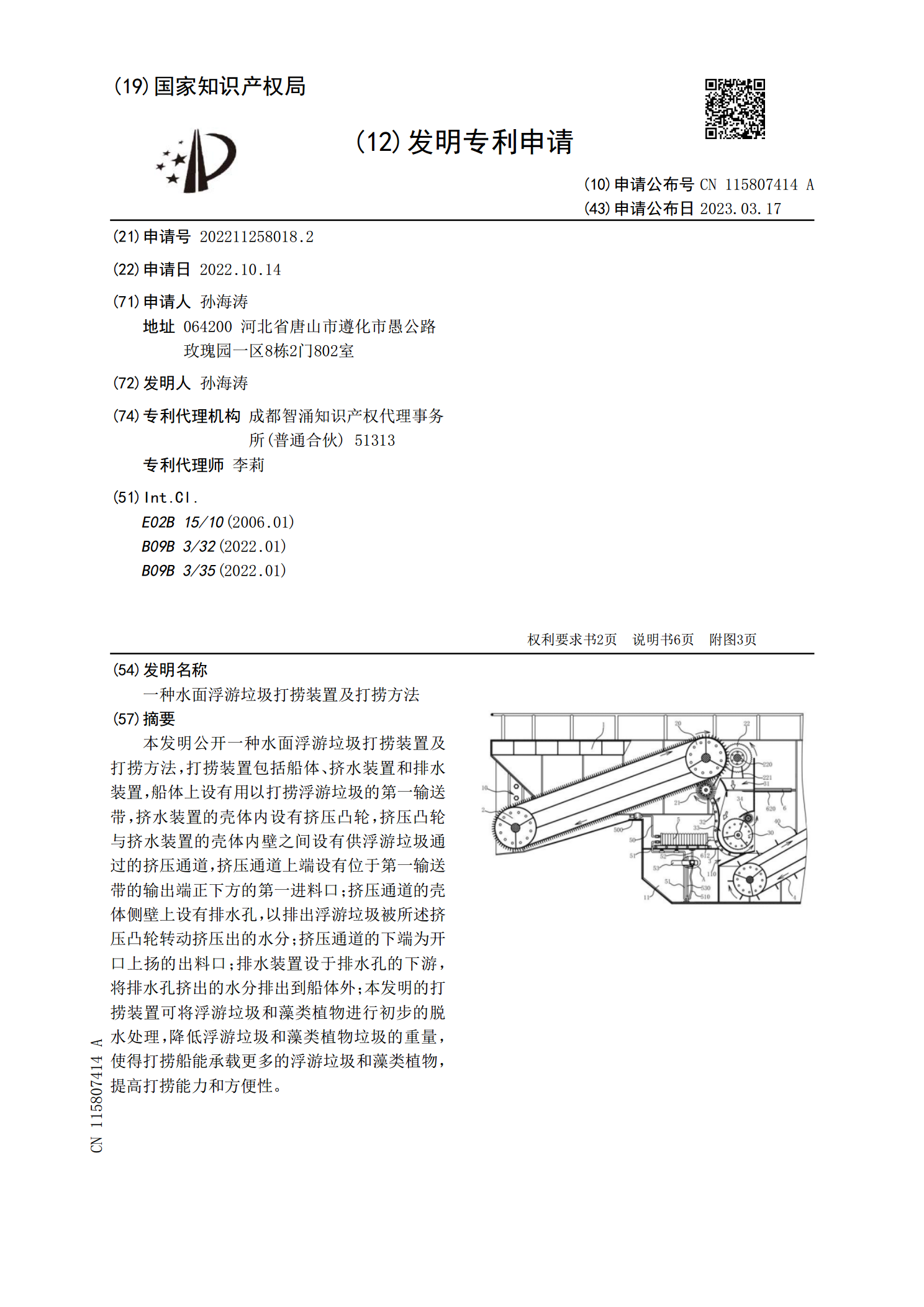
一种水面浮游垃圾打捞装置及打捞方法.pdf
本发明公开一种水面浮游垃圾打捞装置及打捞方法,打捞装置包括船体、挤水装置和排水装置,船体上设有用以打捞浮游垃圾的第一输送带,挤水装置的壳体内设有挤压凸轮,挤压凸轮与挤水装置的壳体内壁之间设有供浮游垃圾通过的挤压通道,挤压通道上端设有位于第一输送带的输出端正下方的第一进料口;挤压通道的壳体侧壁上设有排水孔,以排出浮游垃圾被所述挤压凸轮转动挤压出的水分;挤压通道的下端为开口上扬的出料口;排水装置设于排水孔的下游,将排水孔挤出的水分排出到船体外;本发明的打捞装置可将浮游垃圾和藻类植物进行初步的脱水处理,降低浮游
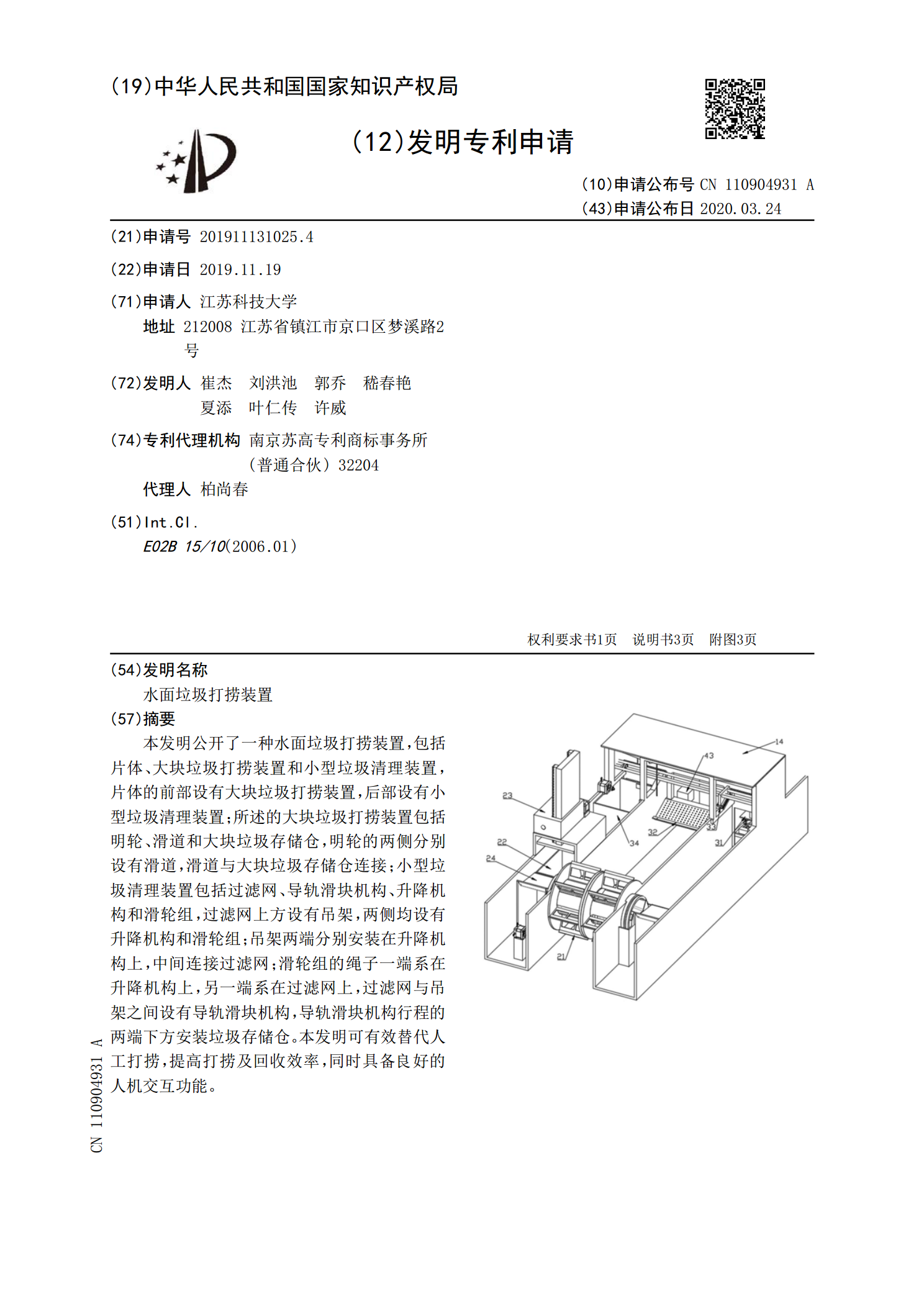
水面垃圾打捞装置.pdf
本发明公开了一种水面垃圾打捞装置,包括片体、大块垃圾打捞装置和小型垃圾清理装置,片体的前部设有大块垃圾打捞装置,后部设有小型垃圾清理装置;所述的大块垃圾打捞装置包括明轮、滑道和大块垃圾存储仓,明轮的两侧分别设有滑道,滑道与大块垃圾存储仓连接;小型垃圾清理装置包括过滤网、导轨滑块机构、升降机构和滑轮组,过滤网上方设有吊架,两侧均设有升降机构和滑轮组;吊架两端分别安装在升降机构上,中间连接过滤网;滑轮组的绳子一端系在升降机构上,另一端系在过滤网上,过滤网与吊架之间设有导轨滑块机构,导轨滑块机构行程的两端下方安
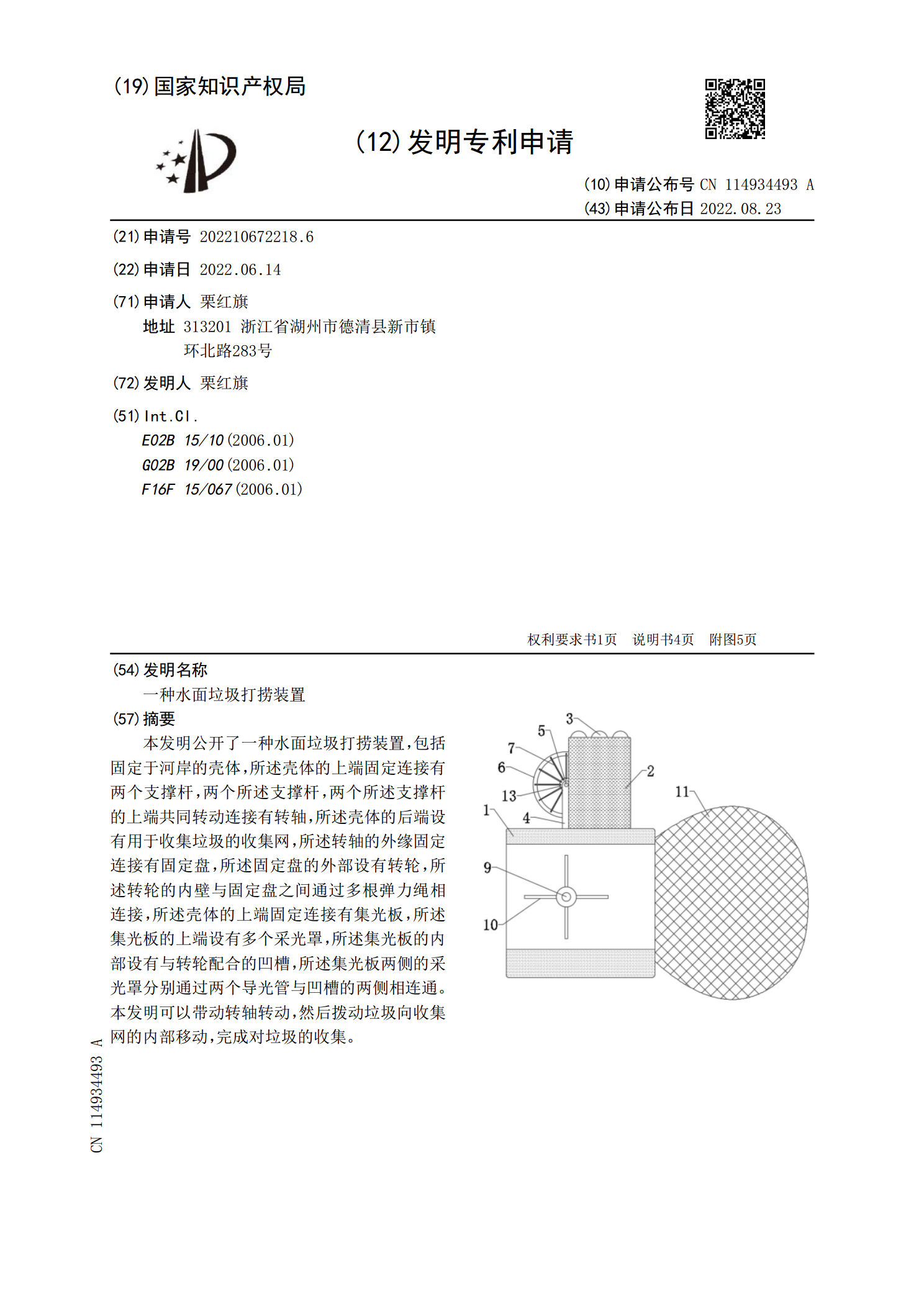
一种水面垃圾打捞装置.pdf
本发明公开了一种水面垃圾打捞装置,包括固定于河岸的壳体,所述壳体的上端固定连接有两个支撑杆,两个所述支撑杆,两个所述支撑杆的上端共同转动连接有转轴,所述壳体的后端设有用于收集垃圾的收集网,所述转轴的外缘固定连接有固定盘,所述固定盘的外部设有转轮,所述转轮的内壁与固定盘之间通过多根弹力绳相连接,所述壳体的上端固定连接有集光板,所述集光板的上端设有多个采光罩,所述集光板的内部设有与转轮配合的凹槽,所述集光板两侧的采光罩分别通过两个导光管与凹槽的两侧相连通。本发明可以带动转轴转动,然后拨动垃圾向收集网的内部移动