
一种高精度翼偏角测试仪.pdf

春兰****89


1/7

2/7
3/7

4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高精度翼偏角测试仪.pdf
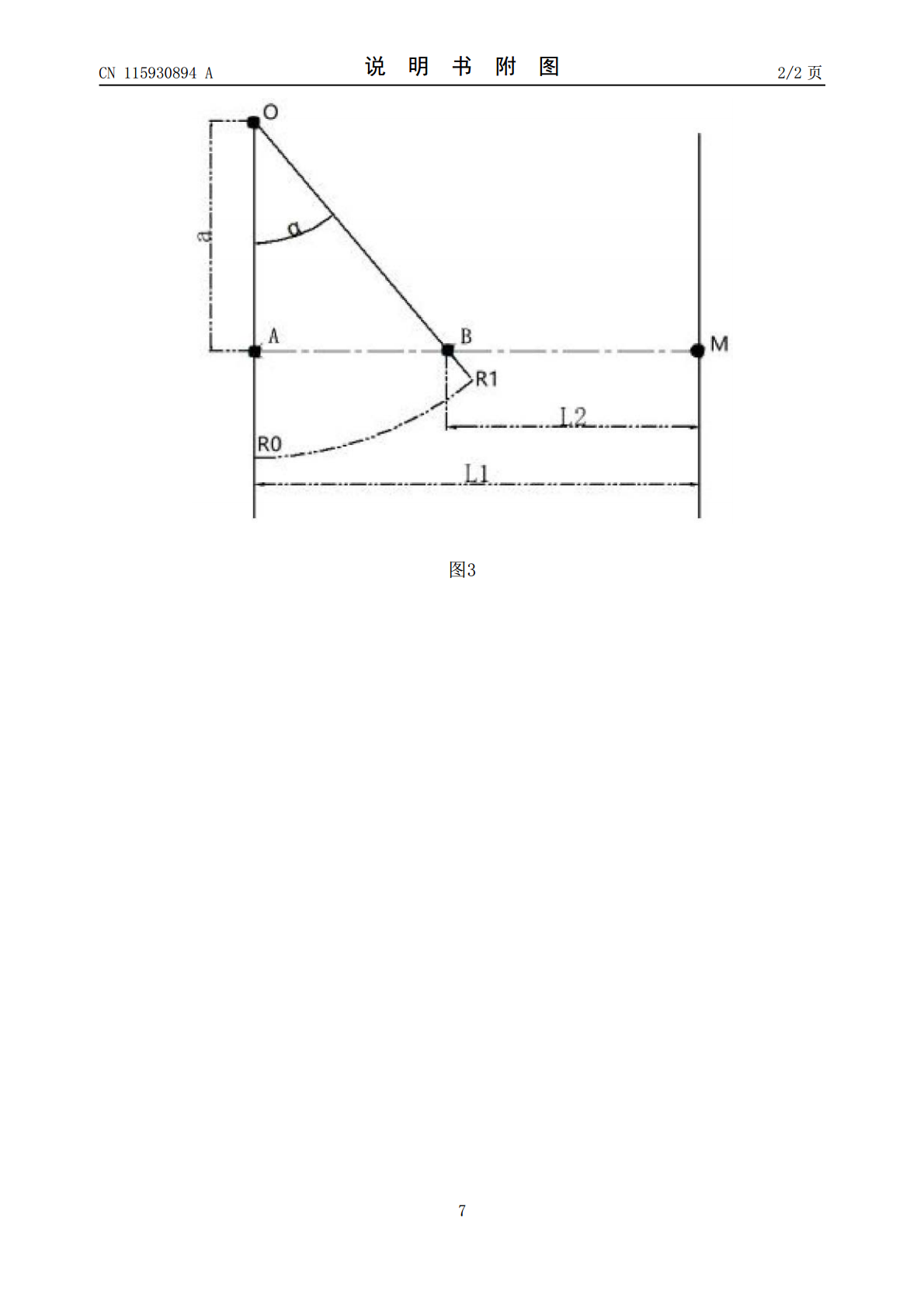
本发明提供一种高精度翼偏角测试仪,属于工程试验测试技术领域,以解决现有的测量方法是采用角位移传感器,对于多型号不同安装方式的翼面适用性不强问题,包括支撑基座,多芯插座设置在支撑基座顶部端面的外侧;四个滑动辅助机构均匀排布设置在支撑基座顶部端面的外侧;四个传感器支柱分别设置在四个滑动辅助机构顶部端面的外侧;四个测试辅助机构分别设置在四个传感器支柱的顶部端面;支撑辅助机构设置在支撑基座顶部端面的中心位置;舵舱设置在支撑辅助机构顶部端面的外侧;可根据翼偏转角度不同测试精度要求选择不同精度等级的激光测距传感器,灵

一种基于高精度电子罗盘的磁偏角测量方法.pdf
本发明涉及磁偏角测量技术领域,且公开了一种基于高精度电子罗盘的磁偏角测量方法,包括以下步骤:S1:获取坐标,在机场跑道区域,选择无磁环境良好的空旷场地,布设定位桩A和B,使用全站仪或者GPS对定位桩进行观测,获取本地控制坐标成果和WGS84的经纬度坐标;S2:架设对点,将常规经纬仪架和后视目标对点,然后固定;S3:架设观测台。本发明能够通过对无磁高精度电子罗盘测量杆的全圆观测法的观测,计算出符合规范要求的磁偏角,实现了无需无磁经纬仪、高精度磁力仪的磁偏角测量,可以大大提高应用场景,为机场的建设、运维、导航
一种高精度便捷式肺活量测试仪.pdf
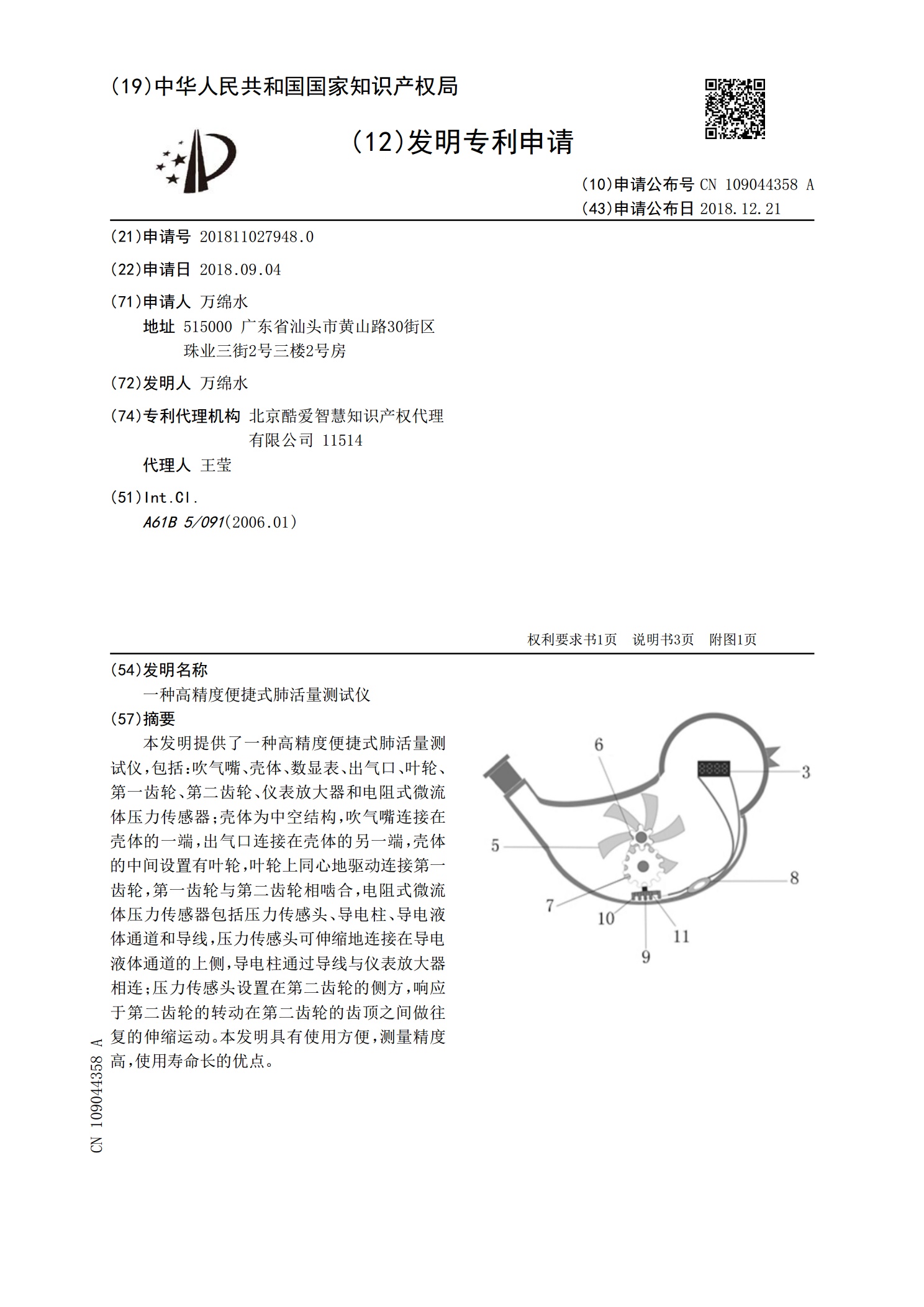
本发明提供了一种高精度便捷式肺活量测试仪,包括:吹气嘴、壳体、数显表、出气口、叶轮、第一齿轮、第二齿轮、仪表放大器和电阻式微流体压力传感器;壳体为中空结构,吹气嘴连接在壳体的一端,出气口连接在壳体的另一端,壳体的中间设置有叶轮,叶轮上同心地驱动连接第一齿轮,第一齿轮与第二齿轮相啮合,电阻式微流体压力传感器包括压力传感头、导电柱、导电液体通道和导线,压力传感头可伸缩地连接在导电液体通道的上侧,导电柱通过导线与仪表放大器相连;压力传感头设置在第二齿轮的侧方,响应于第二齿轮的转动在第二齿轮的齿顶之间做往复的伸缩
一种高精度航天器的太阳翼布局结构.pdf
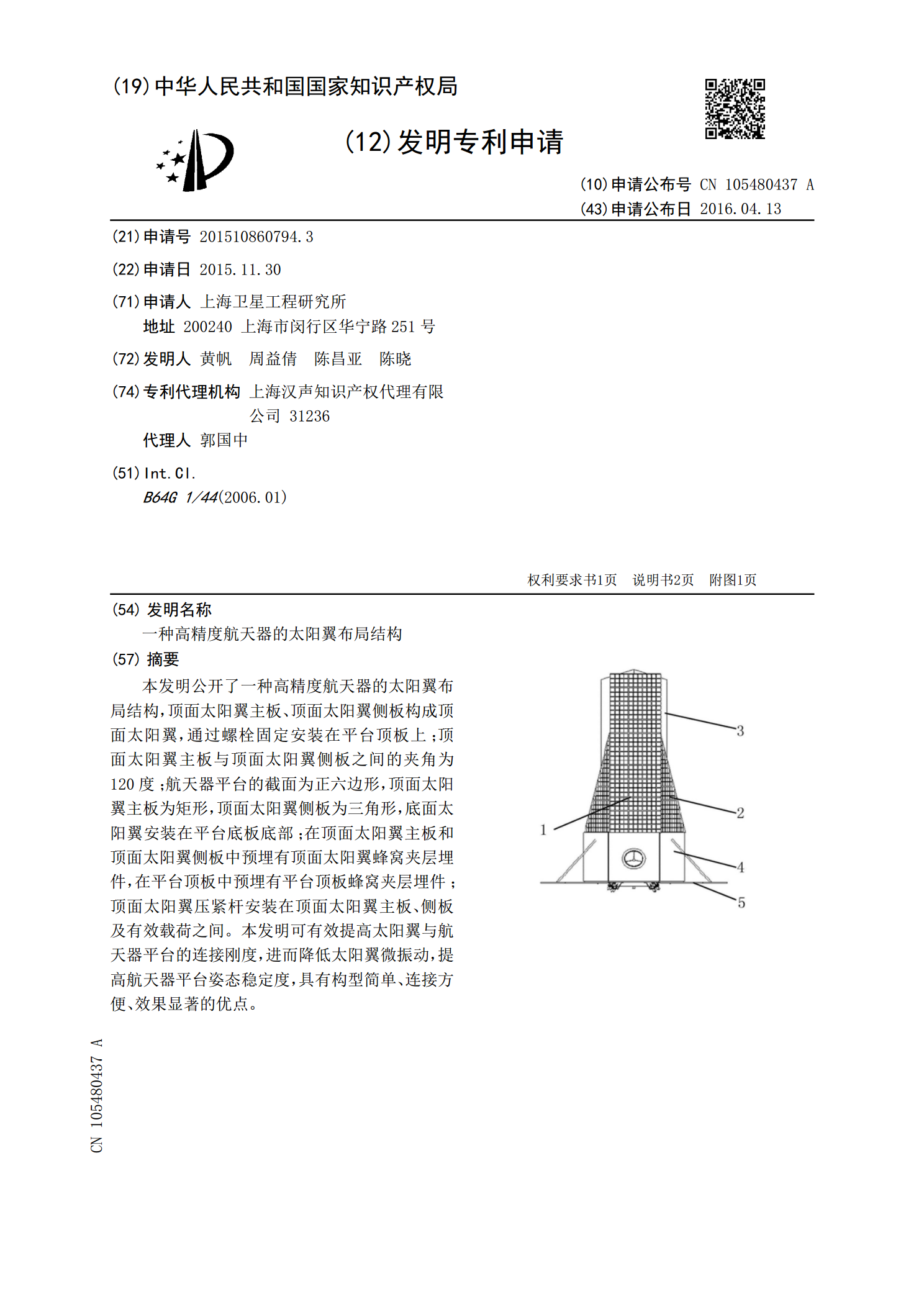
本发明公开了一种高精度航天器的太阳翼布局结构,顶面太阳翼主板、顶面太阳翼侧板构成顶面太阳翼,通过螺栓固定安装在平台顶板上;顶面太阳翼主板与顶面太阳翼侧板之间的夹角为120度;航天器平台的截面为正六边形,顶面太阳翼主板为矩形,顶面太阳翼侧板为三角形,底面太阳翼安装在平台底板底部;在顶面太阳翼主板和顶面太阳翼侧板中预埋有顶面太阳翼蜂窝夹层埋件,在平台顶板中预埋有平台顶板蜂窝夹层埋件;顶面太阳翼压紧杆安装在顶面太阳翼主板、侧板及有效载荷之间。本发明可有效提高太阳翼与航天器平台的连接刚度,进而降低太阳翼微振动,提
一种高精度安装的固定翼飞机螺旋桨.pdf
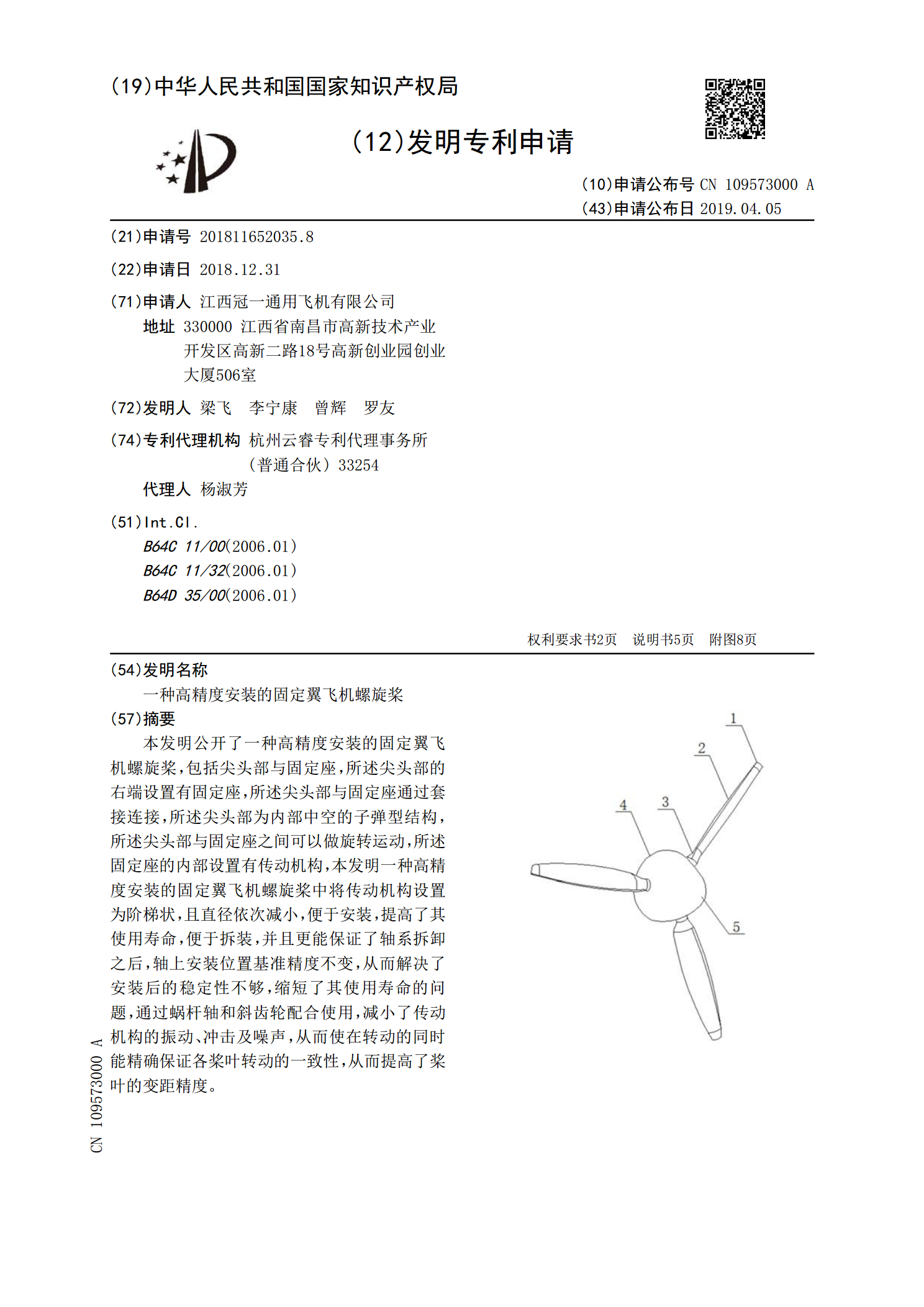
本发明公开了一种高精度安装的固定翼飞机螺旋桨,包括尖头部与固定座,所述尖头部的右端设置有固定座,所述尖头部与固定座通过套接连接,所述尖头部为内部中空的子弹型结构,所述尖头部与固定座之间可以做旋转运动,所述固定座的内部设置有传动机构,本发明一种高精度安装的固定翼飞机螺旋桨中将传动机构设置为阶梯状,且直径依次减小,便于安装,提高了其使用寿命,便于拆装,并且更能保证了轴系拆卸之后,轴上安装位置基准精度不变,从而解决了安装后的稳定性不够,缩短了其使用寿命的问题,通过蜗杆轴和斜齿轮配合使用,减小了传动机构的振动、冲