
一种用于上肢康复训练的关节复合运动机械臂.pdf

一只****生物

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
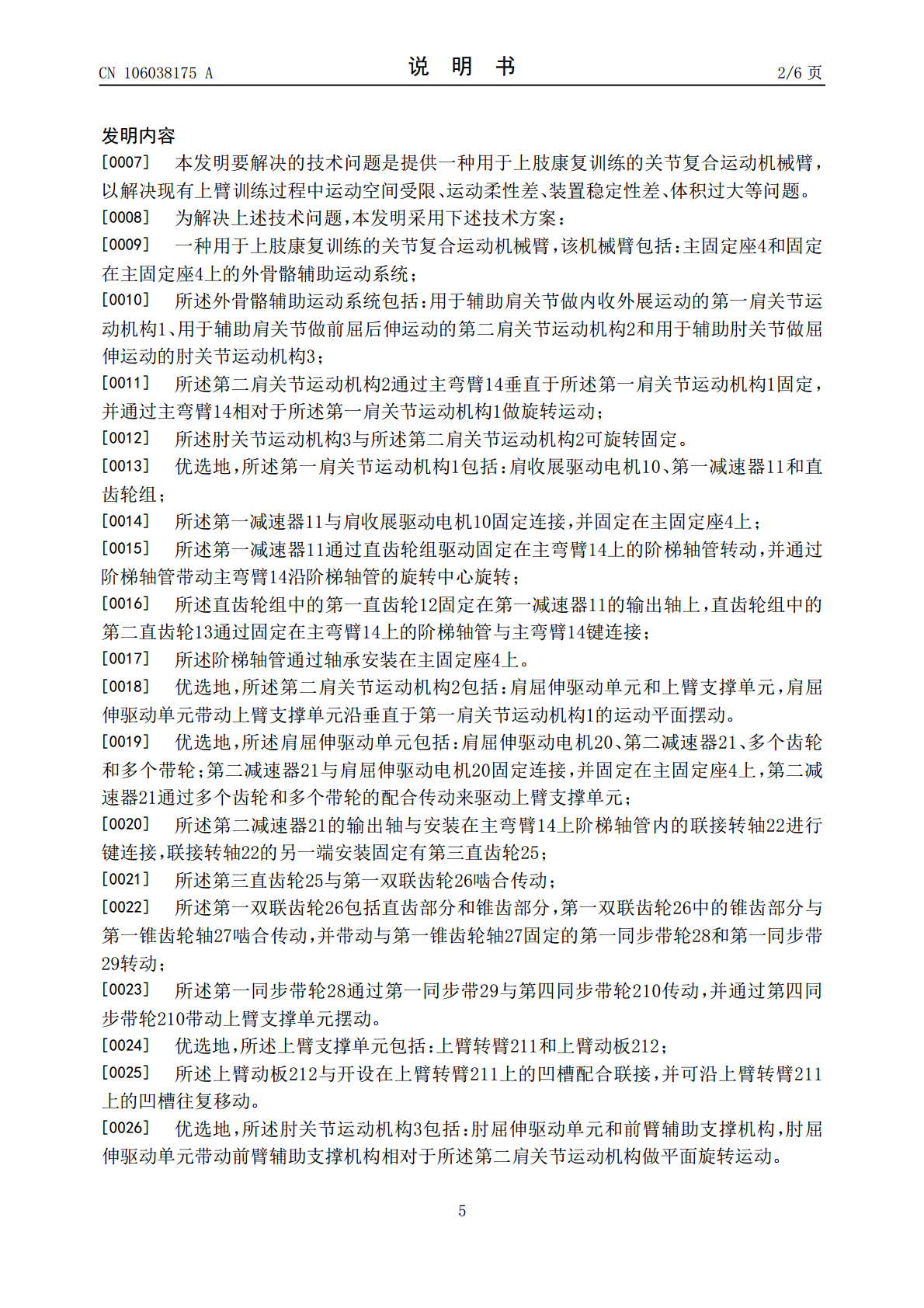
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于上肢康复训练的关节复合运动机械臂.pdf
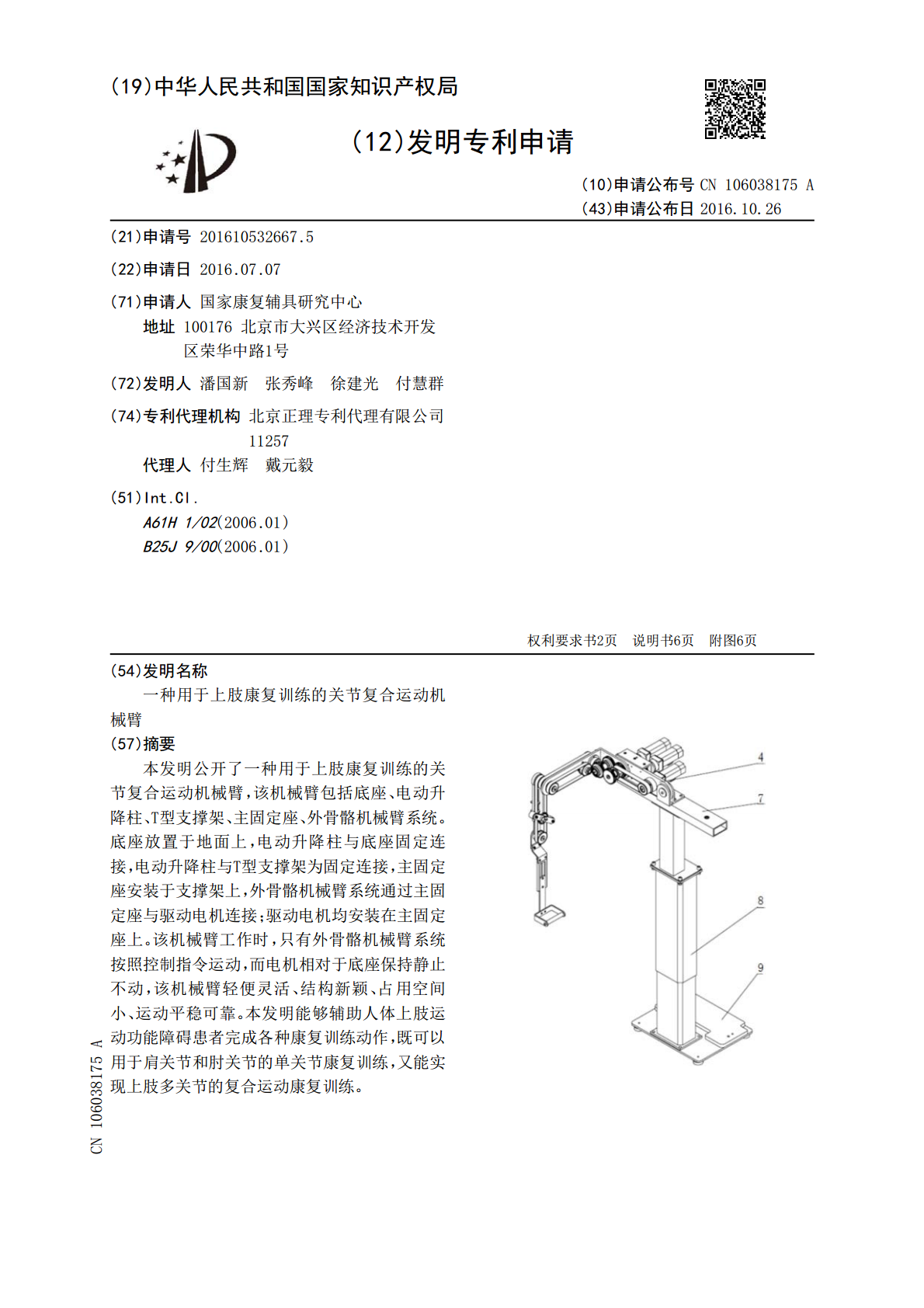
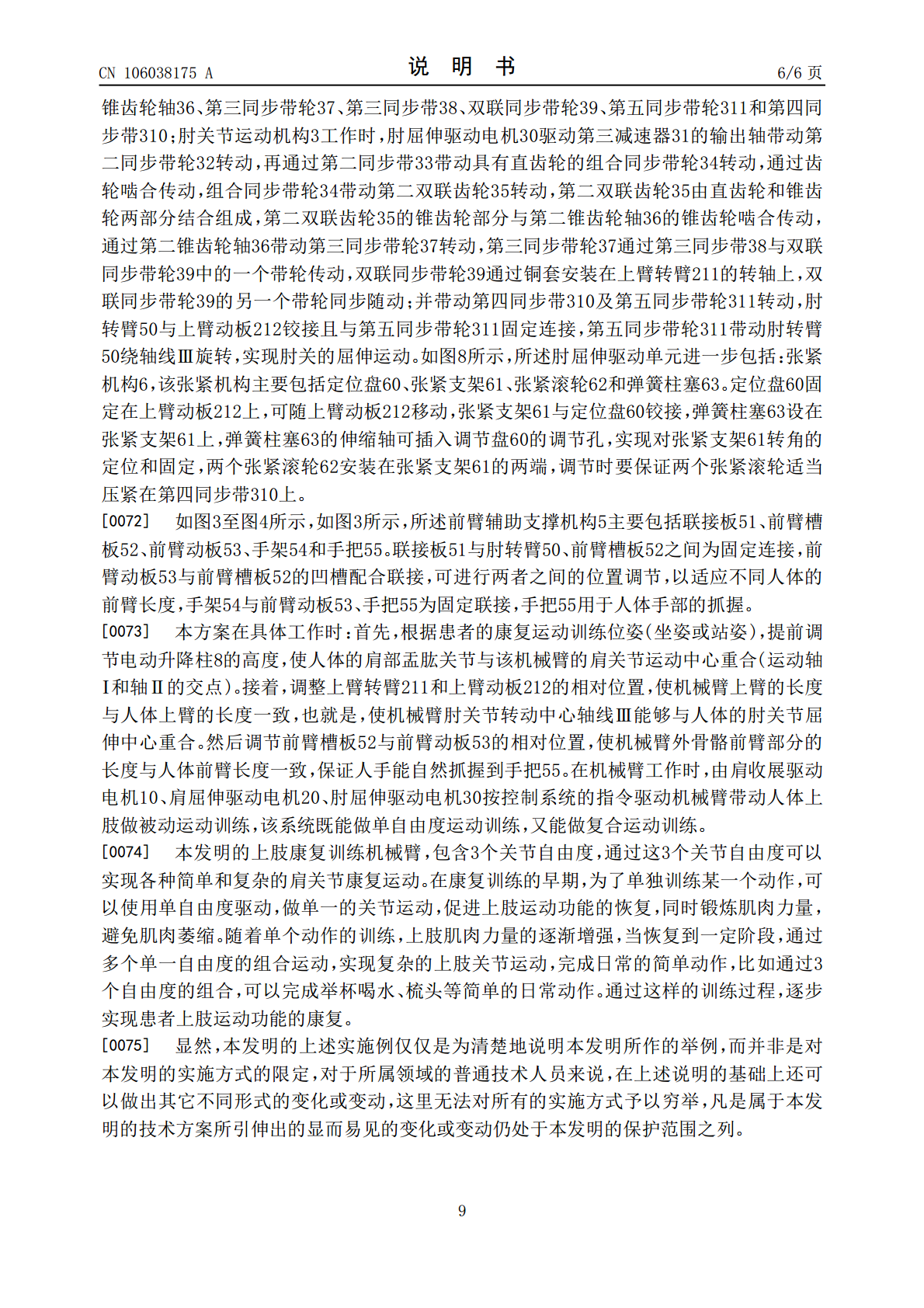
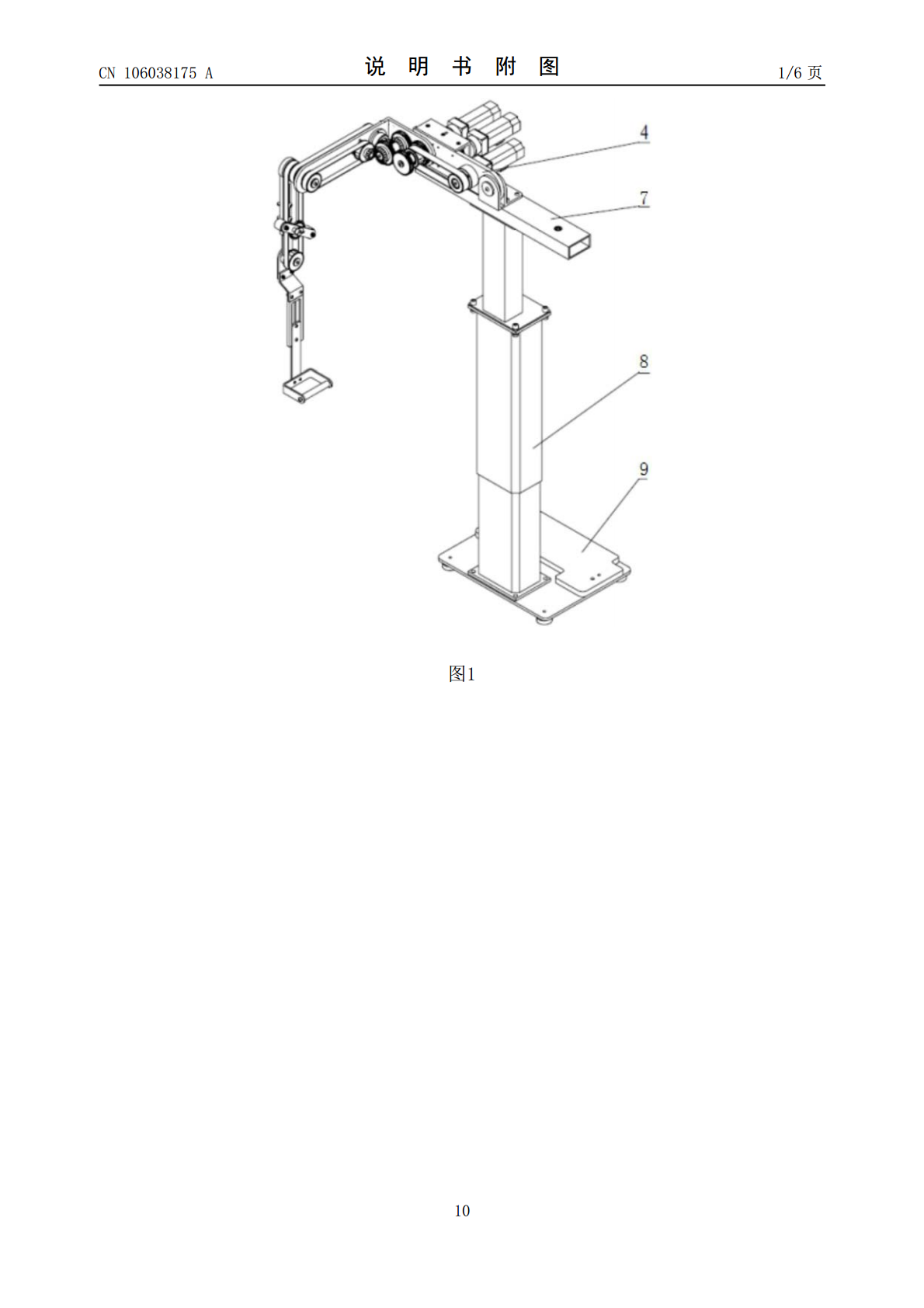
本发明公开了一种用于上肢康复训练的关节复合运动机械臂,该机械臂包括底座、电动升降柱、T型支撑架、主固定座、外骨骼机械臂系统。底座放置于地面上,电动升降柱与底座固定连接,电动升降柱与T型支撑架为固定连接,主固定座安装于支撑架上,外骨骼机械臂系统通过主固定座与驱动电机连接;驱动电机均安装在主固定座上。该机械臂工作时,只有外骨骼机械臂系统按照控制指令运动,而电机相对于底座保持静止不动,该机械臂轻便灵活、结构新颖、占用空间小、运动平稳可靠。本发明能够辅助人体上肢运动功能障碍患者完成各种康复训练动作,既可以用于肩关

一种线驱动上肢康复训练机械臂.pdf
本发明提供了一种线驱动上肢康复训练机械臂,包括:支撑机构;设置在支撑机构的支撑架上的旋转云台机构;上臂屈伸动力传递机构,包括U型板、上臂拉索张紧轮、安装板、上臂屈伸主动轴、从动齿轮、上臂主动拉索轮、上臂屈伸从动轴、上臂扭矩传感器、上臂从动拉索轮以及弧形限位导槽;上臂屈伸机构,包括U型镂空板、上臂屈伸限位销钉以及肘部主动拉索轮;双向张紧机构,包括上臂连杆、张紧轮槽以及肘部拉索张紧轮;肘部屈伸机构,包括U型关节接头、屈伸转轴、肘部拉索轮、肘部转向限位导槽以及前臂连杆;前臂补偿机构,包括直线导轨、滑块以及短连板

一种用于机械臂俯仰及回转的紧凑型复合关节.pdf
一种用于机械臂俯仰及回转的紧凑型复合关节,它涉及机械手臂领域。本发明解决了现有的机械手臂的各关节自由度都是相对独立的,存在结构拖沓、臃肿,导致空间利用率低,故障率高,且电机回转时容易出现关节处电线磨损,甚至损坏的问题。本发明的肩部俯仰主动齿轮安装在肩部俯仰电机输出轴上,第二谐波减速器安装在肩部仰俯座上,肩部俯仰从动齿轮安装在第二谐波减速器动力输入端,肩部俯仰从动齿轮与肩部俯仰主动齿轮相啮合,肩部回转主动齿轮安装在肩部回转电机输出轴上,第一谐波减速器安装在肩部底座上,肩部回转从动齿轮安装在第一谐波减速器动力
中央驱动式上肢康复训练机械臂.pdf
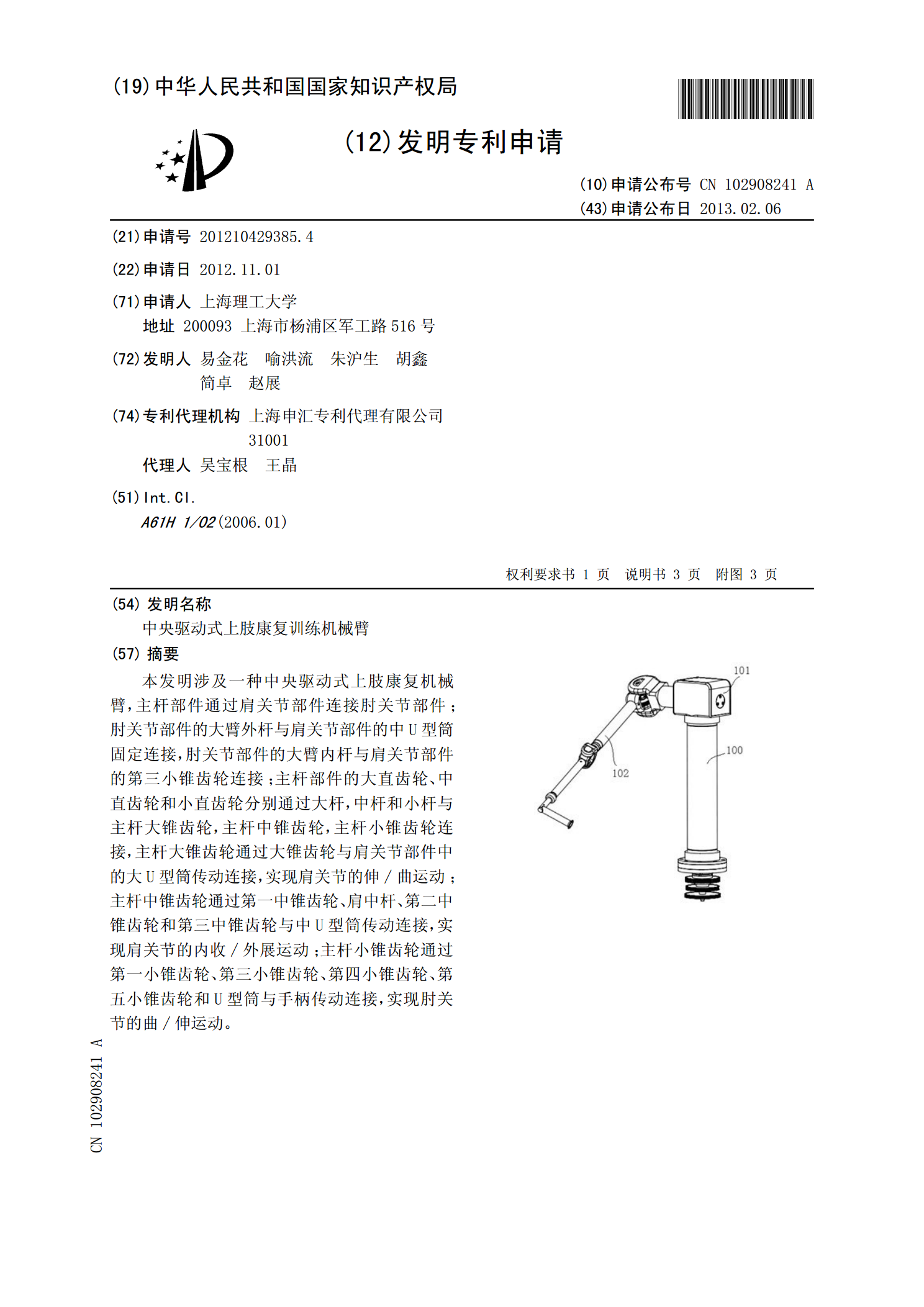
本发明涉及一种中央驱动式上肢康复机械臂,主杆部件通过肩关节部件连接肘关节部件;肘关节部件的大臂外杆与肩关节部件的中U型筒固定连接,肘关节部件的大臂内杆与肩关节部件的第三小锥齿轮连接;主杆部件的大直齿轮、中直齿轮和小直齿轮分别通过大杆,中杆和小杆与主杆大锥齿轮,主杆中锥齿轮,主杆小锥齿轮连接,主杆大锥齿轮通过大锥齿轮与肩关节部件中的大U型筒传动连接,实现肩关节的伸/曲运动;主杆中锥齿轮通过第一中锥齿轮、肩中杆、第二中锥齿轮和第三中锥齿轮与中U型筒传动连接,实现肩关节的内收/外展运动;主杆小锥齿轮通过第一小锥

上肢关节运动肩复合体讲义教材.ppt
上肢关节运动一、肩复合体(一)肩复合体诸关节肱骨头向后旋转约30°-40°;向上倾斜45°。(2)关节囊(3)韧带2、肩锁关节3、胸锁关节4、肩胛胸壁关节肩胛骨在冠状面上偏斜角约为30°。肩胛前间隙:肩胛下筋膜与胸廓外筋膜间。肩胛前间隙被前锯肌分为前后两个间隙,前间隙位于前锯肌与胸廓外筋膜之间,后间隙位于前锯肌肩胛下筋膜之间。5、肩峰下关节(二)肩复合体关节运动(3)上旋与下旋上旋:肩胛骨上部不移动,下部外旋。下旋:由上旋回复至原位。2、盂肱关节的运动3、胸锁关节的运动三、肩复合体运动与原动肌2、内收包括