
移动式薄膜打包机器人.pdf

和裕****az

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
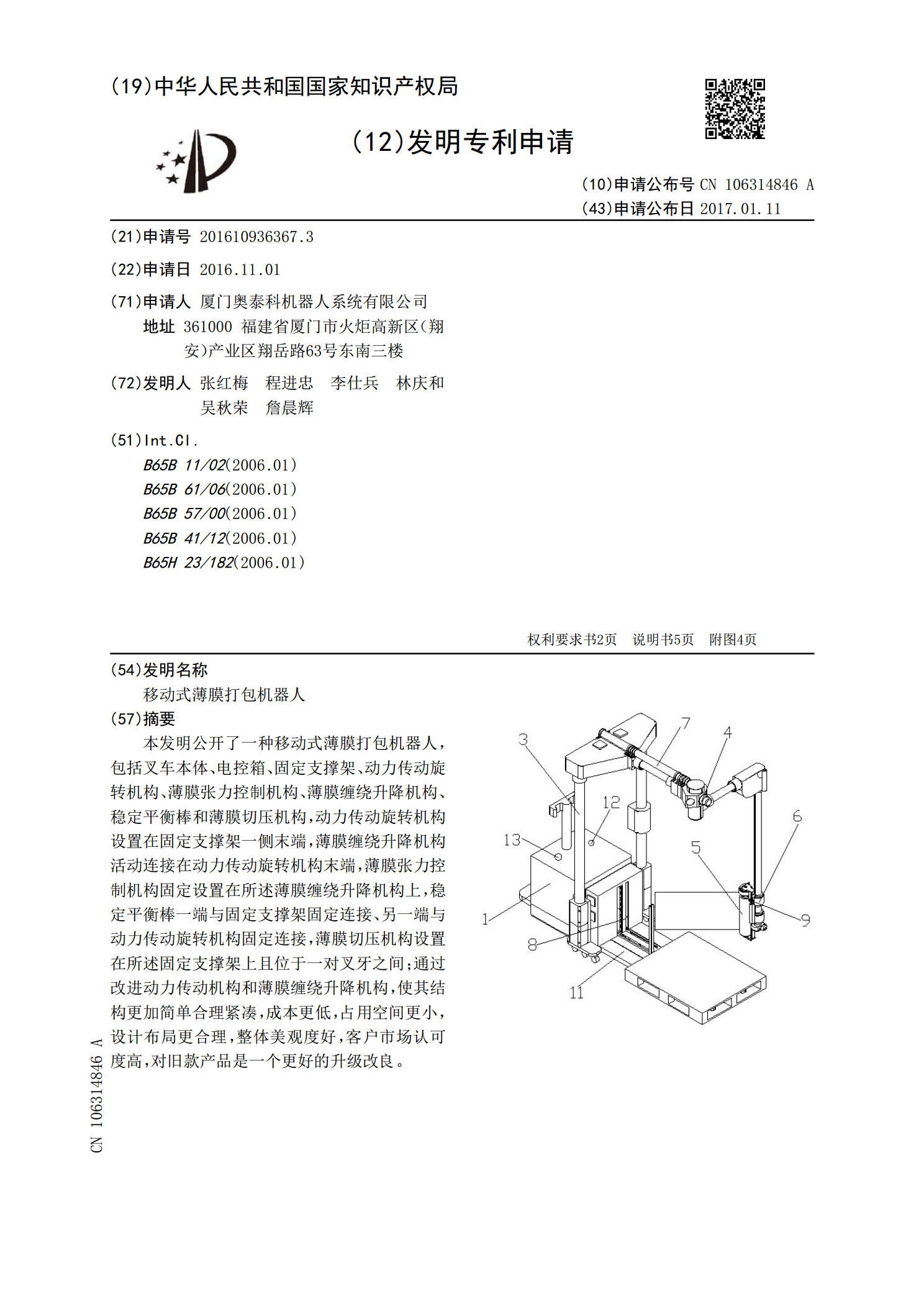
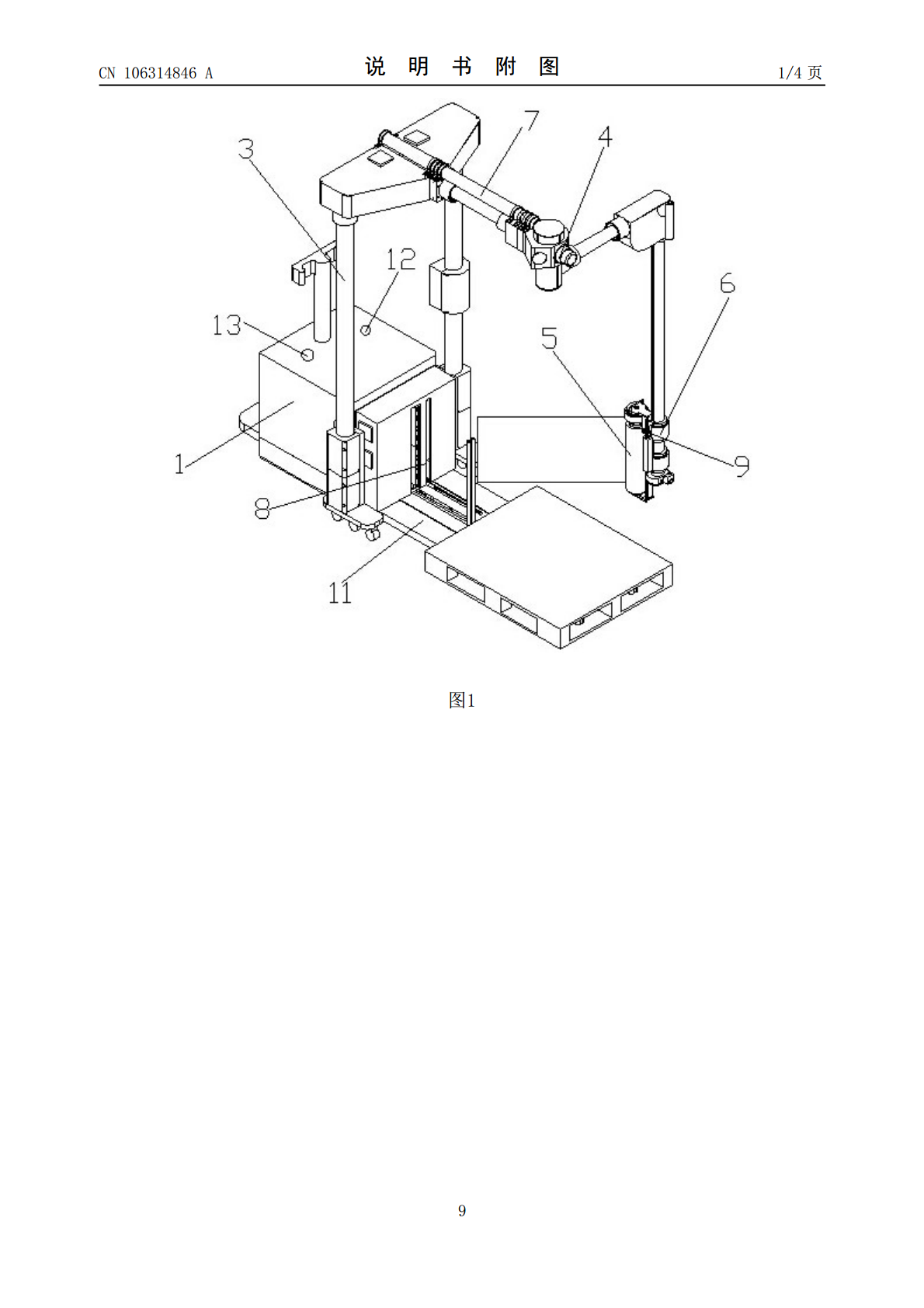
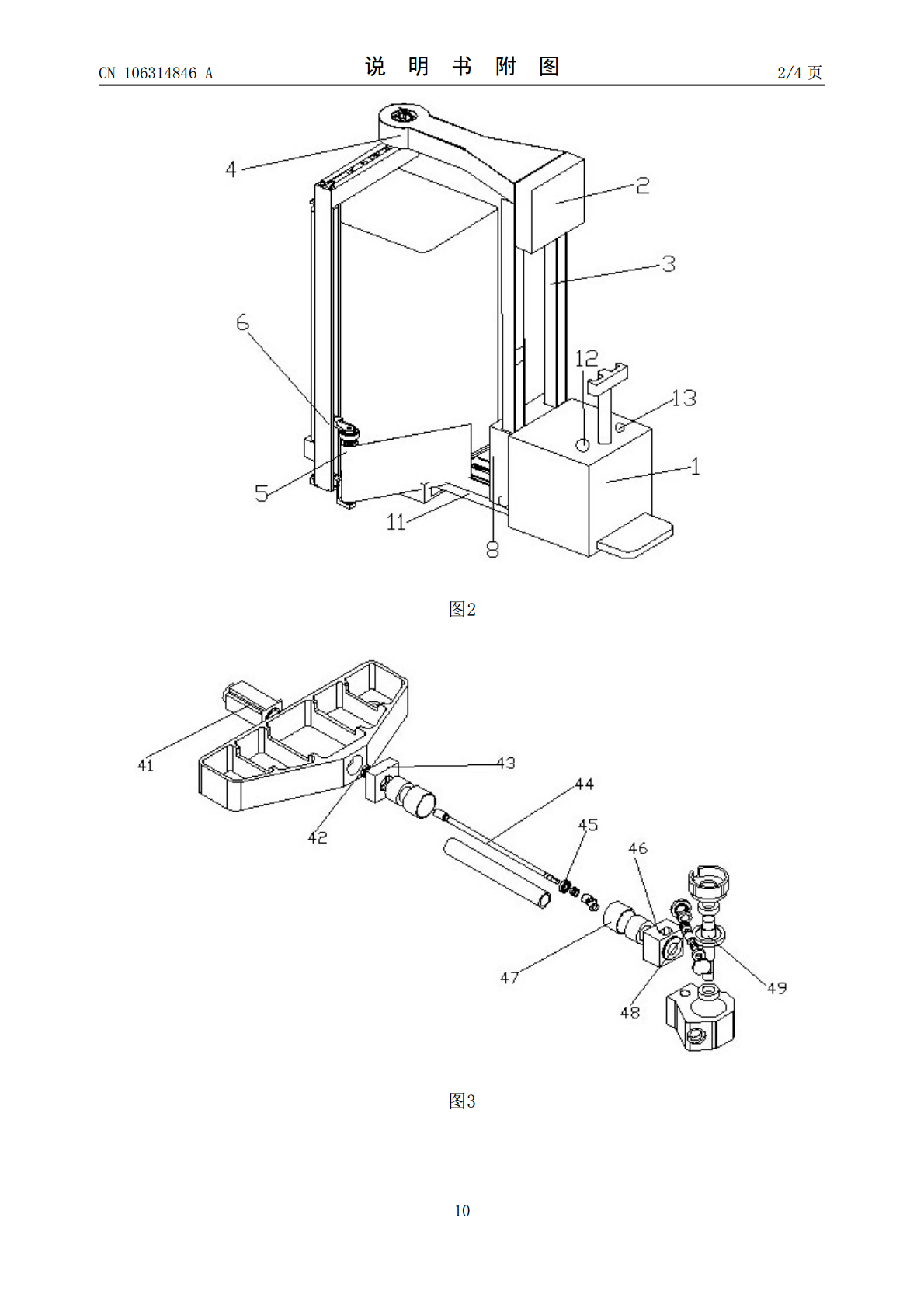
移动式薄膜打包机器人.pdf
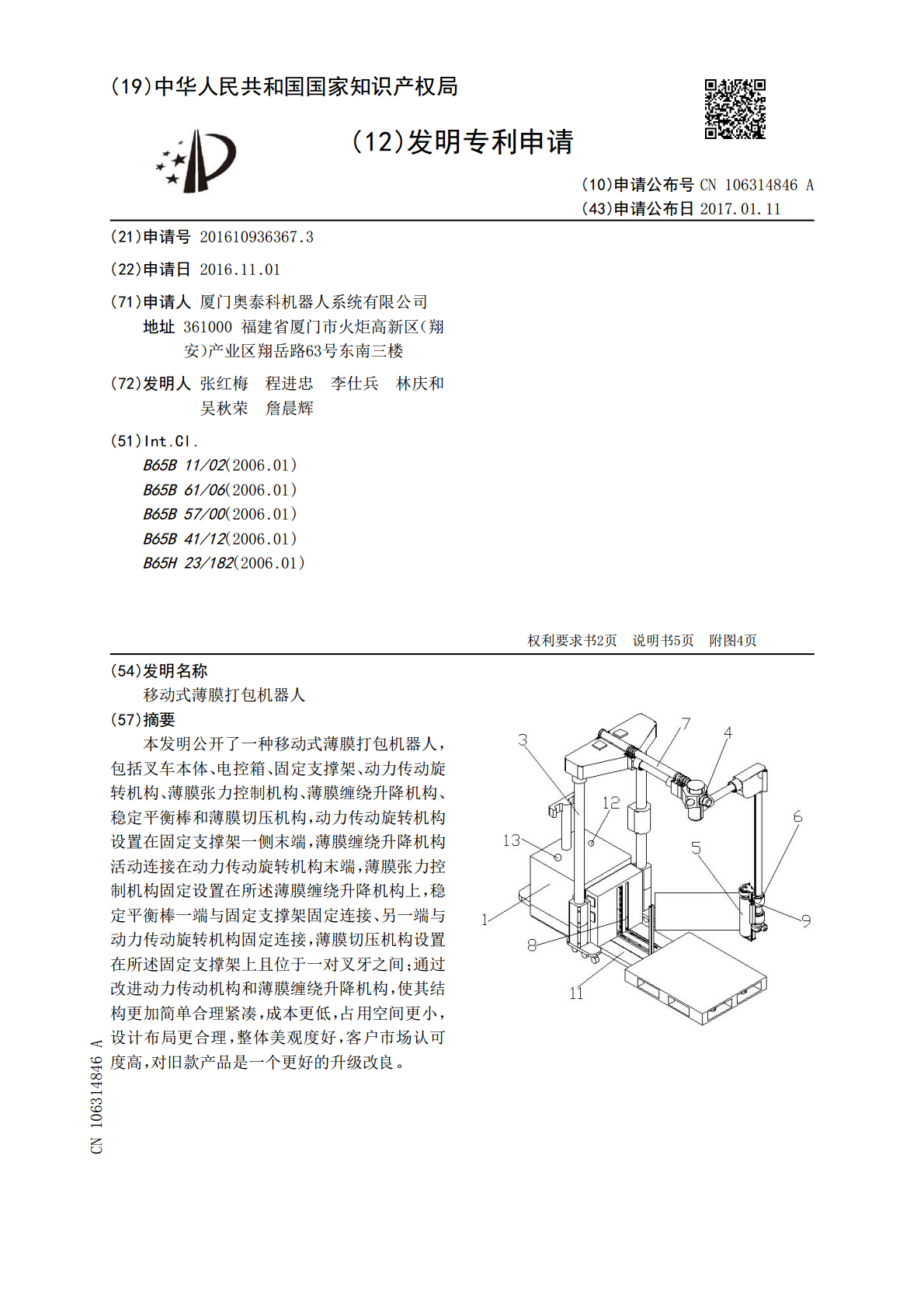
本发明公开了一种移动式薄膜打包机器人,包括叉车本体、电控箱、固定支撑架、动力传动旋转机构、薄膜张力控制机构、薄膜缠绕升降机构、稳定平衡棒和薄膜切压机构,动力传动旋转机构设置在固定支撑架一侧末端,薄膜缠绕升降机构活动连接在动力传动旋转机构末端,薄膜张力控制机构固定设置在所述薄膜缠绕升降机构上,稳定平衡棒一端与固定支撑架固定连接、另一端与动力传动旋转机构固定连接,薄膜切压机构设置在所述固定支撑架上且位于一对叉牙之间;通过改进动力传动机构和薄膜缠绕升降机构,使其结构更加简单合理紧凑,成本更低,占用空间更小,设计
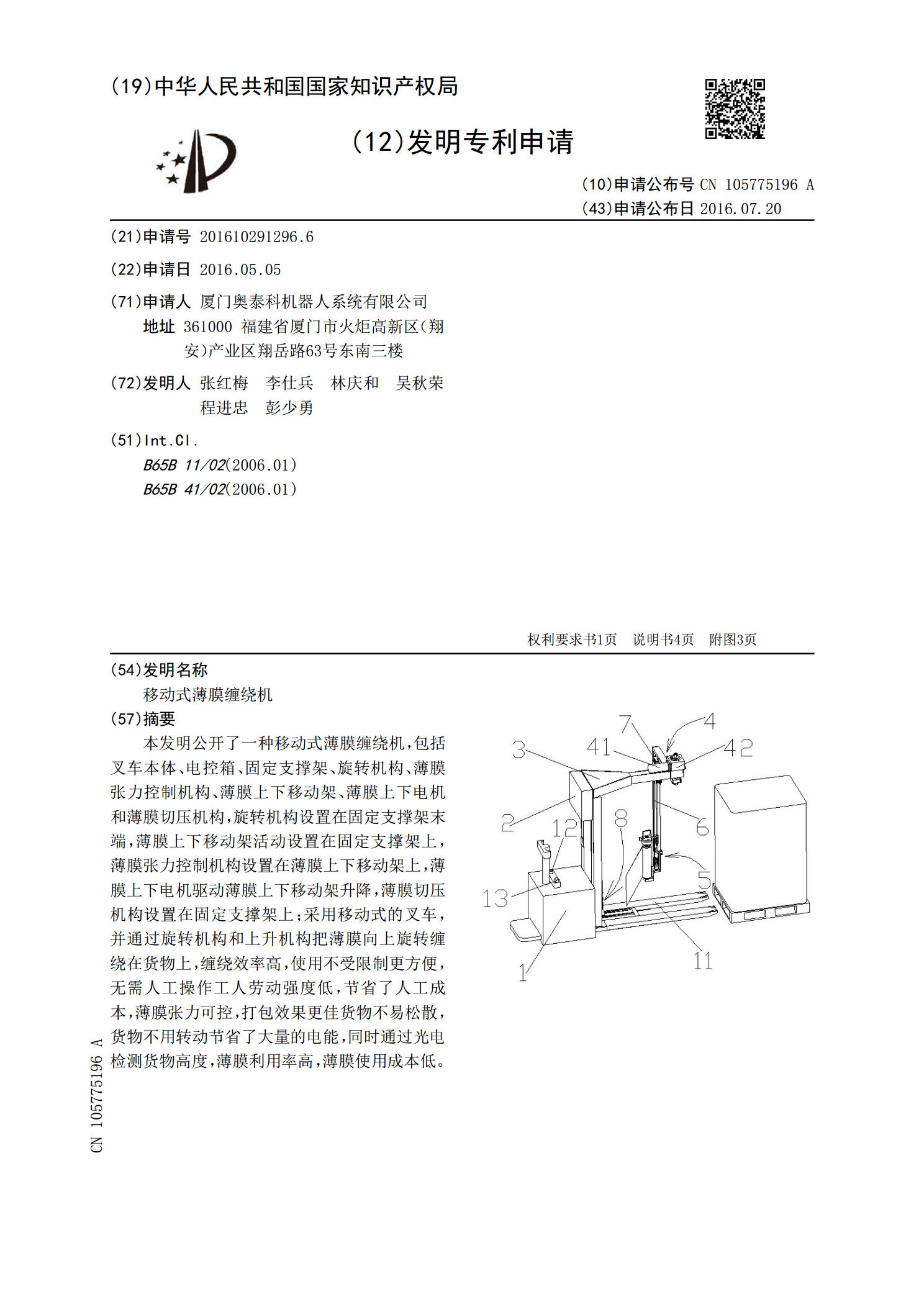
移动式薄膜缠绕机.pdf
本发明公开了一种移动式薄膜缠绕机,包括叉车本体、电控箱、固定支撑架、旋转机构、薄膜张力控制机构、薄膜上下移动架、薄膜上下电机和薄膜切压机构,旋转机构设置在固定支撑架末端,薄膜上下移动架活动设置在固定支撑架上,薄膜张力控制机构设置在薄膜上下移动架上,薄膜上下电机驱动薄膜上下移动架升降,薄膜切压机构设置在固定支撑架上;采用移动式的叉车,并通过旋转机构和上升机构把薄膜向上旋转缠绕在货物上,缠绕效率高,使用不受限制更方便,无需人工操作工人劳动强度低,节省了人工成本,薄膜张力可控,打包效果更佳货物不易松散,货物不用

移动式打包机的安全操作.doc
移动式打包机的安全操作(一)整机检查和检修每一次开机工作前,必须对机器进行整体性的检查,查找出明显的故障,以防在工作中造成机器损伤及人员伤害。(二)发动机启动发动机启动之前必须检查各个接线处的螺丝是否拧紧、电路有无短路现象。若有,应及时处理,以免对发动机造成伤害。(三)发动机熄火发动机熄火之前,应将油门逐级降低,等发动机转速降低后再熄火。(四)发动机常规检查定期添加和更换机油,定期检查发动机上的紧固件是否松动,若有,则需及时拧紧。(五)发动机电瓶发动机的电瓶为打包机以及发动机提供电源,发动机不工作时,应把

移动式打包机的安全操作.docx
移动式打包机的安全操作(一)整机检查和检测、修理每一次开机工作之前必须对机器进行整体性的检查查找出明显的故障以防在工作中造成机器损伤及人员伤害。(二)发动机启动发动机启动之前必须检查各个接线处的螺丝是否拧紧、电路有无短路现象。若有应快速进行处理以免对发动机造成伤害。(三)发动机熄火发动机熄火之前应将油门逐级降低等发动机转速降低后再熄火。(四)发动机常规检查定期添加和更换机油定期检查发动机上的紧固件是否松动若有则需及时拧紧。(五)发动机电瓶发动机的电瓶为打包机以及发动机提供电源发动机不工作

移动式打包机的安全操作.docx
移动式打包机的安全操作(一)整机检查和检修每一次开机工作前,必须对机器进行整体性的检查,查找出明显的故障,以防在工作中造成机器损伤及人员伤害。(二)发动机启动发动机启动之前必须检查各个接线处的螺丝是否拧紧、电路有无短路现象。若有,应及时处理,以免对发动机造成伤害。(三)发动机熄火发动机熄火之前,应将油门逐级降低,等发动机转速降低后再熄火。(四)发动机常规检查定期添加和更换机油,定期检查发动机上的紧固件是否松动,若有,则需及时拧紧。(五)发动机电瓶发动机的电瓶为打包机以及发动机提供电源,发动机不工作时,应把