
一种可穿戴智能下肢康复装置及控制方法.pdf

高格****gu


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种可穿戴智能下肢康复装置及控制方法.pdf
本发明公开了一种可穿戴智能下肢康复装置及控制方法,装置其左侧腰部主支撑件和右侧腰部主支撑件的一侧通过腰部调整机构连接在一起,左侧背部支撑架和右侧背部支撑架固定在对应侧的腰部主支撑架上,主控箱体通过连接片固定在背部支撑架上;髋关节驱动机构与腰部支撑件的“G”型结构相连接;另有髋关节执行机构,膝关节的执行机构,脚部机构;生命特征监测设备位于人体的右侧手臂上。控制方法包括传感器测量压力信号、脉搏信号、血压信号,信号经中央处理器处理,产生伺服电机控制参数和患者生命体征参数,通过显示屏显示,并通过无线WIFI与外围

一种可穿戴的下肢康复训练装置.pdf
本发明公开了医疗器械技术领域的一种可穿戴的下肢康复训练装置,包括底板,底板下端面左右两侧前后两端均设有滚轮,底板上端面前后两侧均转动连接有齿轮杆,齿轮杆左右端面均固定连接有第二转动块,第二转动块上下两端均通过销轴转动连接有第四连杆,底板上端面前侧中部通过滑槽板滑动连接有T型杆,T型杆左右两端均滑动连接有L型套,L型套左右端面前侧通过销轴转动连接有第一驱动板,第一驱动板下端面通过第一滑杆滑动连接有第一调节板,第一调节板下端通过销轴转动连接有第二驱动板;本发明实现了可根据使用者的身高体型来对整个装置的穿戴尺寸
智能穿戴设备控制方法、装置、智能穿戴设备及介质.pdf
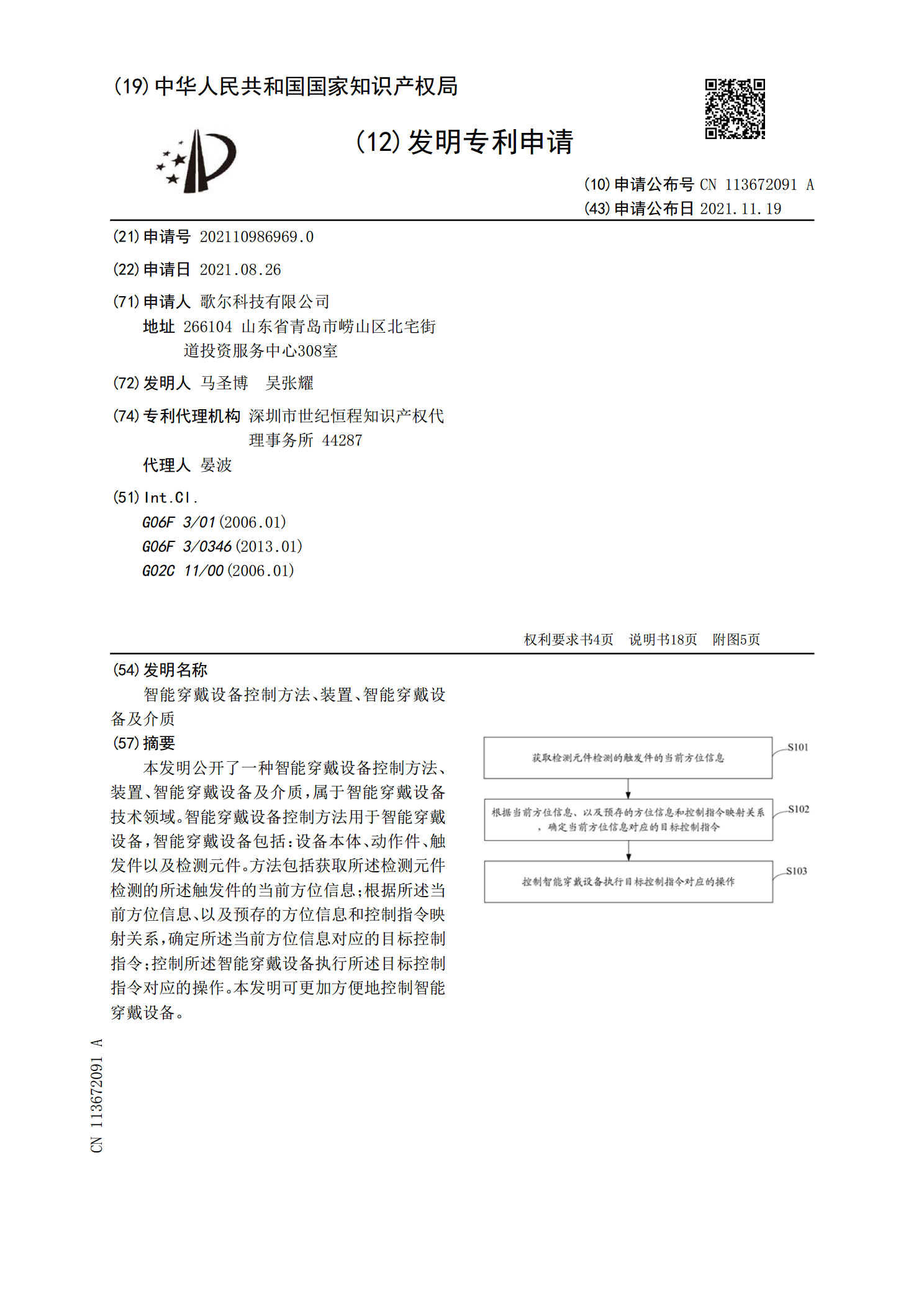
本发明公开了一种智能穿戴设备控制方法、装置、智能穿戴设备及介质,属于智能穿戴设备技术领域。智能穿戴设备控制方法用于智能穿戴设备,智能穿戴设备包括:设备本体、动作件、触发件以及检测元件。方法包括获取所述检测元件检测的所述触发件的当前方位信息;根据所述当前方位信息、以及预存的方位信息和控制指令映射关系,确定所述当前方位信息对应的目标控制指令;控制所述智能穿戴设备执行所述目标控制指令对应的操作。本发明可更加方便地控制智能穿戴设备。

一种患者上下肢智能康复锻炼装置及锻炼方法.pdf
本发明公开了一种患者上下肢智能康复锻炼装置,包括框架,框架的上方设有第一滑杆、第二滑杆和第三滑杆,第一滑杆上设有上肢主动锻炼机构,上肢主动锻炼机构包括第一弹力带和吊环;第二滑杆上设有第一下肢被动锻炼机构,第一下肢被动锻炼机构包括第一电机、第一定滑轮、第一绑带和第一牵引绳;第三滑杆上设有第二下肢主动锻炼机构和第二下肢被动锻炼机构,第二下肢主动锻炼机构包括第二弹力带和第二绑带;第二下肢被动锻炼机构包括第二电机、第二定滑轮、第三绑带和第二牵引绳。本发明可以实现患者上下肢主动康复锻炼以及上下肢被动康复锻炼,而且还

一种用于下肢康复训练的可穿戴行走装置.pdf
本发明公开了一种用于下肢康复训练的可穿戴行走装置,包括腰带(1),均设置在腰带(1)上的第一牵引器(2)、第二牵引器(7)和电池盒(3),以及两根平衡柺等。本发明不需要价格高昂的高科技电子设备,只通过设置在腰带上的两个牵引电机与两根牵引绳相匹合,便能完成人体行走的引导;同时,本发明还采用了手柄控制方式对牵引电机的工作状态进行控制,使患者不仅能自己控制行走的速度,还降低了本发明的下肢康复训练的可穿戴行走装置难度;从而本发明很好的解决了现有的瘫痪穿戴行走装置结构复杂、售价过高的问题,使所有普通家庭的瘫痪病人都