
一种多功能无人机智能起降站系统.pdf

一吃****海逸

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多功能无人机智能起降站系统.pdf
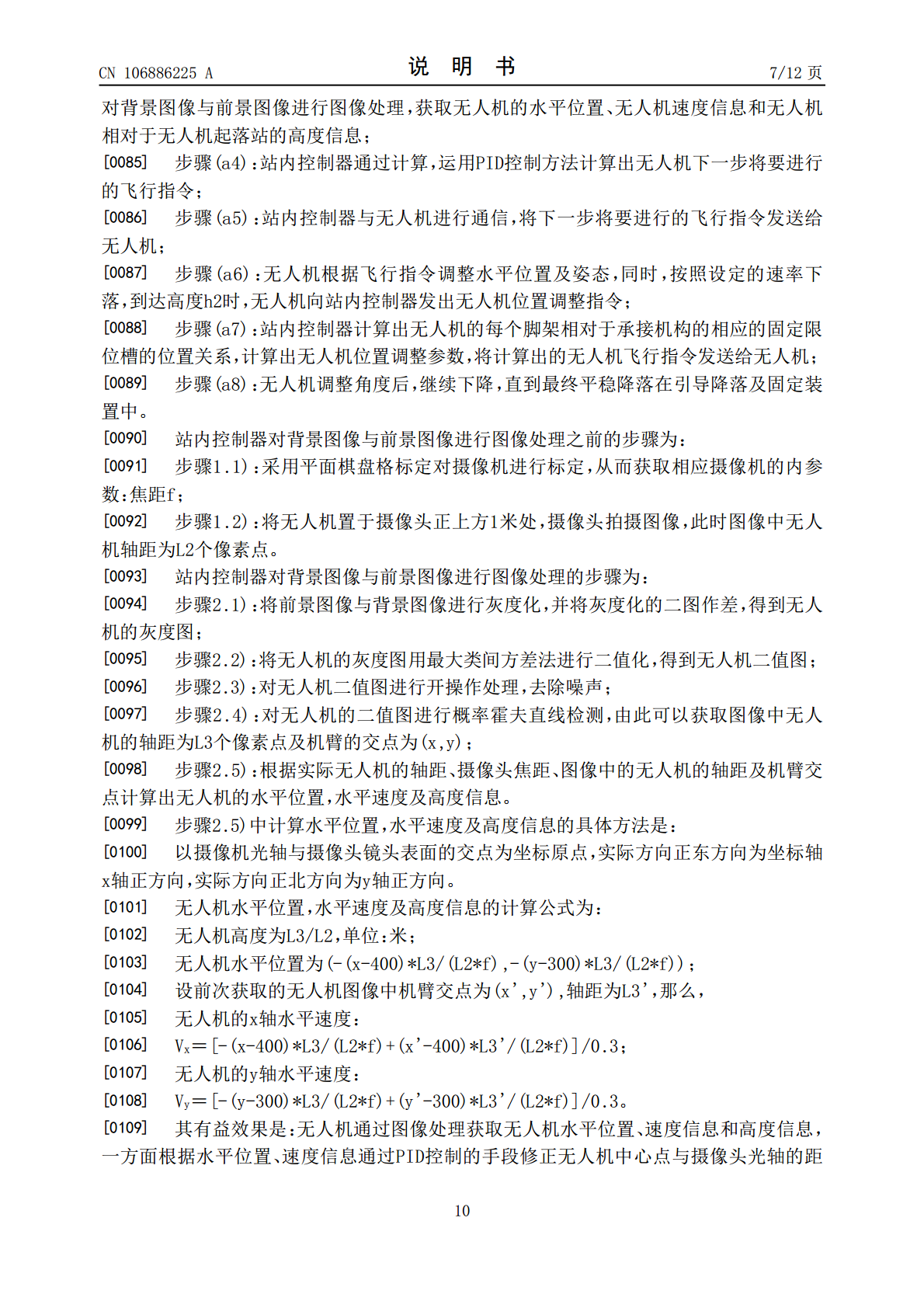
本发明公开了一种多功能无人机智能起降站系统,包括视觉粗定位模块,其包括站内控制器,其与图像采集装置相连,图像采集装置设置于起降站内且用于实时采集无人机图像,并传送至站内控制器,再经机载控制器来控制无人机的降落高度及无人机机头的方向;精定位模块,其包括用于承载无人机的支撑架;所述支撑架上安装有与无人机旋翼相匹配的凹槽,且每个凹槽的与无人机支架相接触的侧面上均开设有豁口,所述豁口用于支撑并固定无人机;自主续航模块,其用于接收机载控制器传来的无人机电池仓的电量信息及电池位置信息,对低于或等于预设电量信息的无人机
一种多功能便携式无人机起降平台.pdf
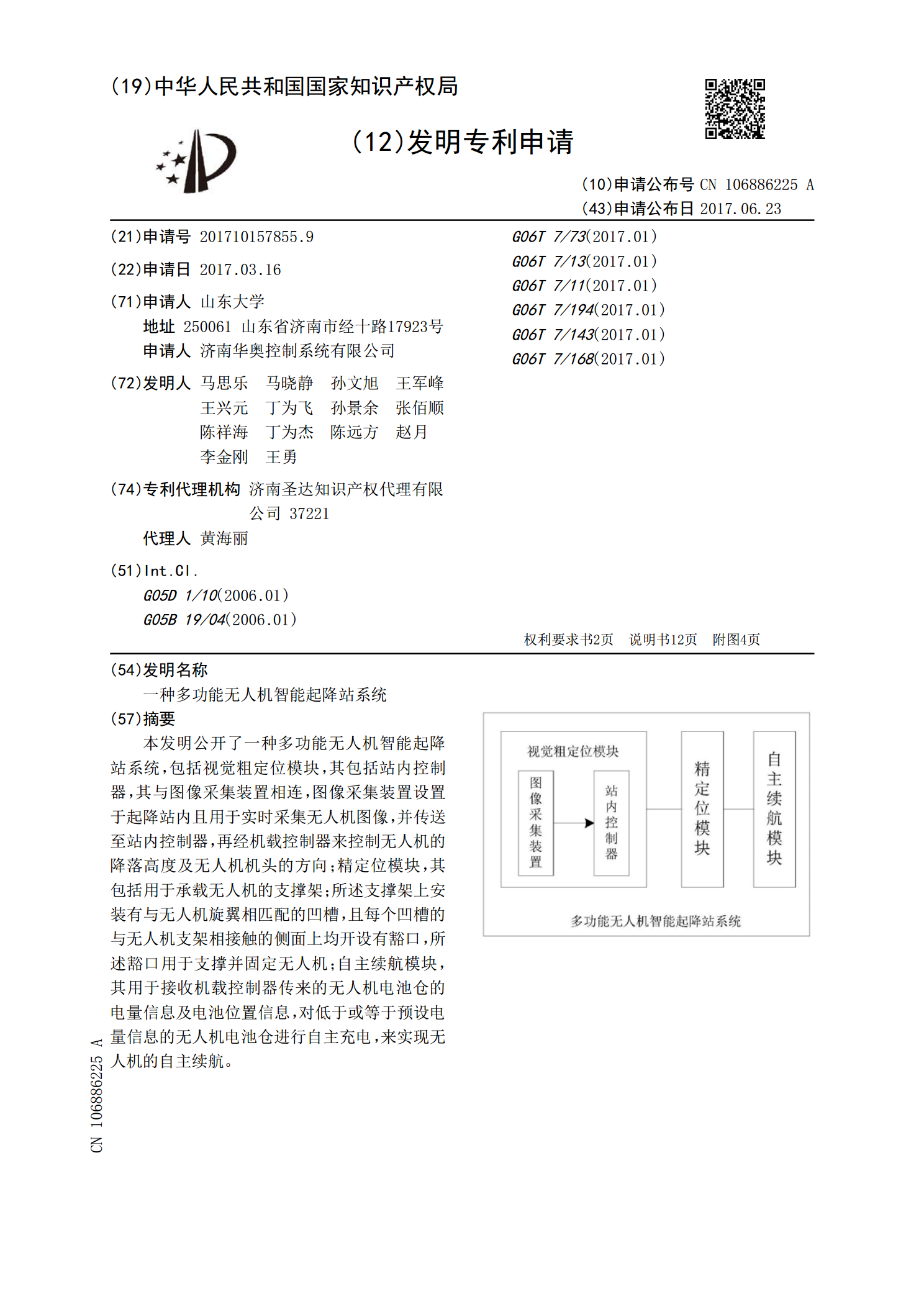
本发明涉及一种多功能便携式无人机起降平台,包括固定板、电子称重平台、支腿,所述的固定板为圆盘结构,所述的固定板的下部焊接安装三个支撑座,所述的支腿通过销轴安装于支撑座,所述的固定板上部安装电子称重平台,所述的电子称重平台的台面设置为和固定板相同半径的圆盘结构,所述的电子称重平台的上表面中部设置水准泡,所述的固定板的侧面安装超声波驱鸟器,所述固定板四周设有用于锁定无人机的锁定装置,在所述固定板的中部设置有两个凹槽,凹槽内分别匹配安装有导电插槽。本发明能够适应在不同的地理环境下架设,其可实现电能及时补充,便于
一种皮卡型车载无人机智能起降和自主续航系统.pdf
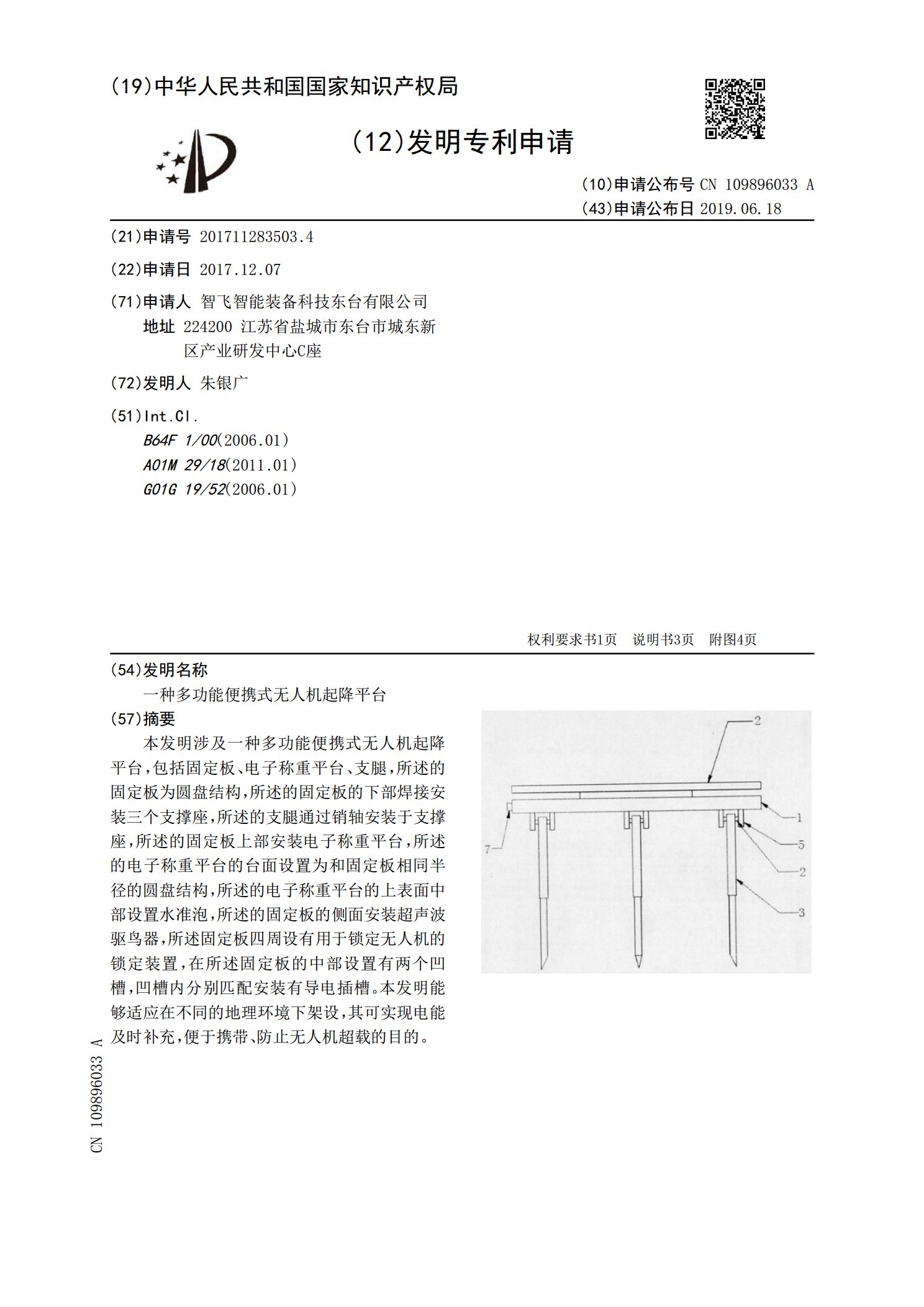
本发明公开了一种皮卡型车载无人机智能起降和自主续航系统,属于无人机设计技术领域。该系统包括升降平台装置、无人机自动充电装置、基于视觉和麦克纳姆轮的着陆算法与全向定位算法三个部分。在无人机的脚架底部安装了四个麦克纳姆轮,通过配合无人机的视觉摄像头,基于麦克纳姆轮全向移动算法,可以解决无人机在平台上全向移动的问题。通过机械传动原理,将升降平台设计为带滑轨的空间连杆升降结构,该结构可以实现平面的旋转运动和与该平面垂直的直线运动的相互转换。只需在减速电机的驱动下,下旋转面转过一定的角度,无人机降落平台即可相应抬高
一种固定翼无人机舰载智能轨道快速起降平台.pdf
本发明公开了一种固定翼无人机舰载智能轨道快速起降平台,包括上滑轨、上支撑杆、轮子、驱动阻尼装置、下滑轨、液压缸、支撑平台、拦阻索、平台滑轨、滑块、距离姿态传感器和智能控制系统。无人机起飞时,智能控制系统控制液压缸带动平台展开,装载无人机并使驱动阻尼装置带动起降平台移动到预定起飞位置,通过分析起飞参数,计算弹射无人机所需驱动力大小,从而利用驱动阻尼装置带动支撑平台弹射无人机;无人机着陆时,智能控制系统分析由距离姿态传感器采集到的无人机着陆信息,计算无人机进近轨迹,调整平台偏转角度所及其所在位置,利用平台上的

一种无人机动态起降装置及起降方法.pdf
本发明提供了一种无人机动态起降装置及起降方法,安装在载体基座上,包括姿态调整机构、以及设置在姿态调整机构上的停机坪,姿态调整机构设置在载体基座上,用于动态调整停机坪的位姿状态,停机坪内设有用于存放无人机的停机位;姿态调整机构和停机坪均连接有控制器,控制器用于实时动态调整姿态调整机构的位姿,以使停机坪始终保持水平状态。本发明所述的一种无人机动态起降装置及起降方法通过设置姿态调整机构,将停机坪放置于姿态调整机构上方,控制单元置于载体上,共同组成无人机起降装置;姿态调整机构采用U型框架设计,合理利用紧凑空间,预