
一种多镜头全景相机的镜头位置微调装置.pdf

王秋****哥哥

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多镜头全景相机的镜头位置微调装置.pdf
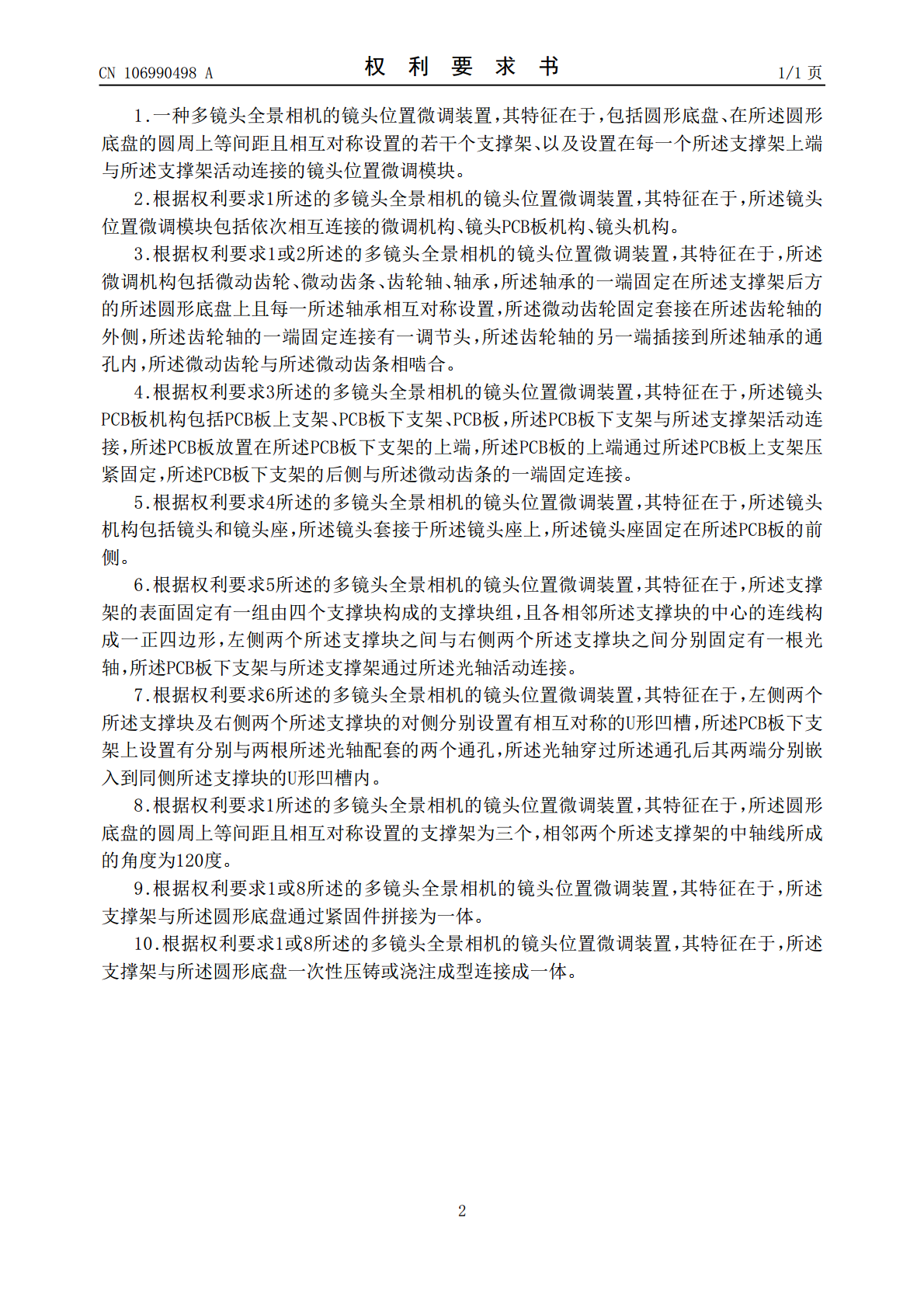
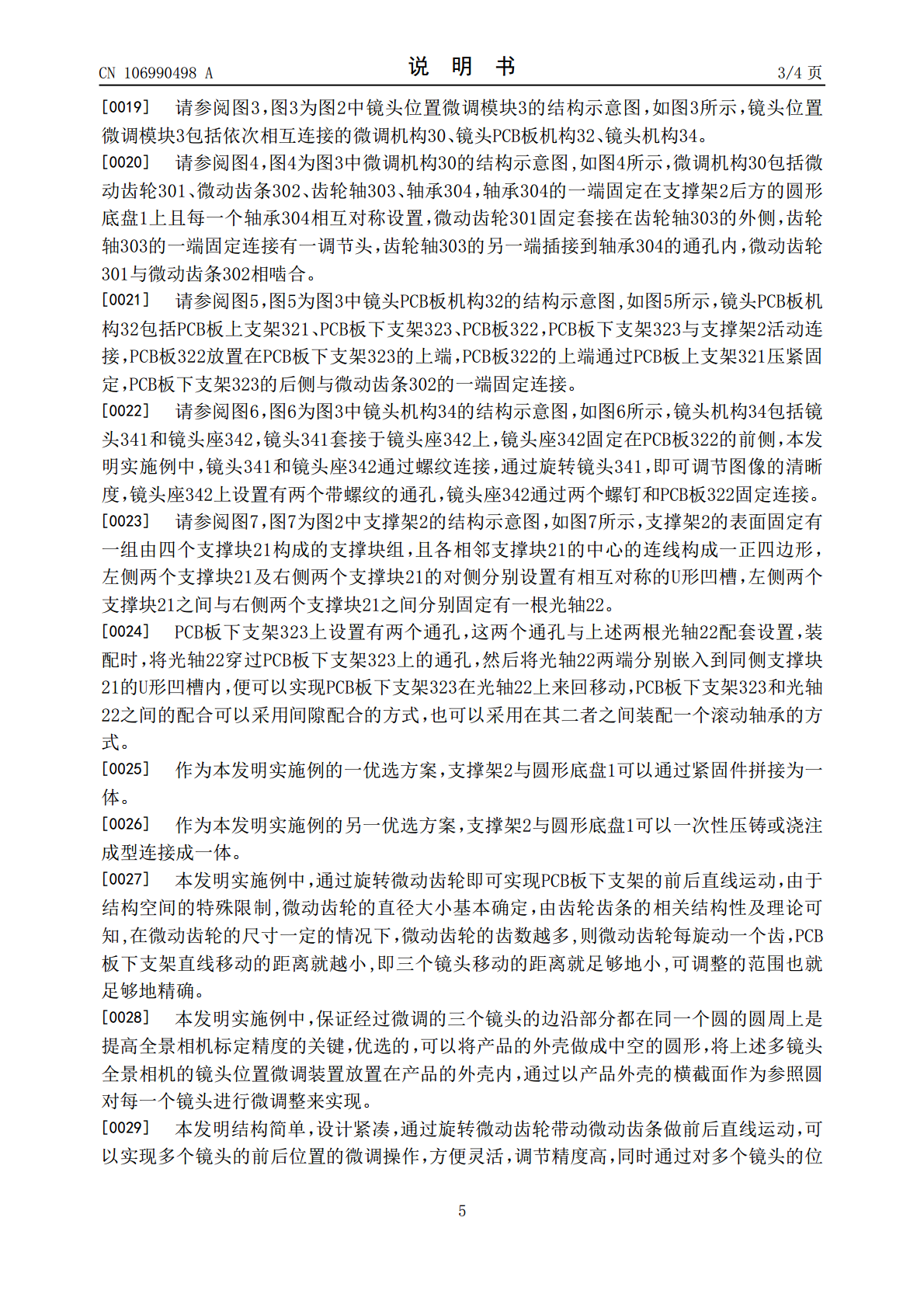
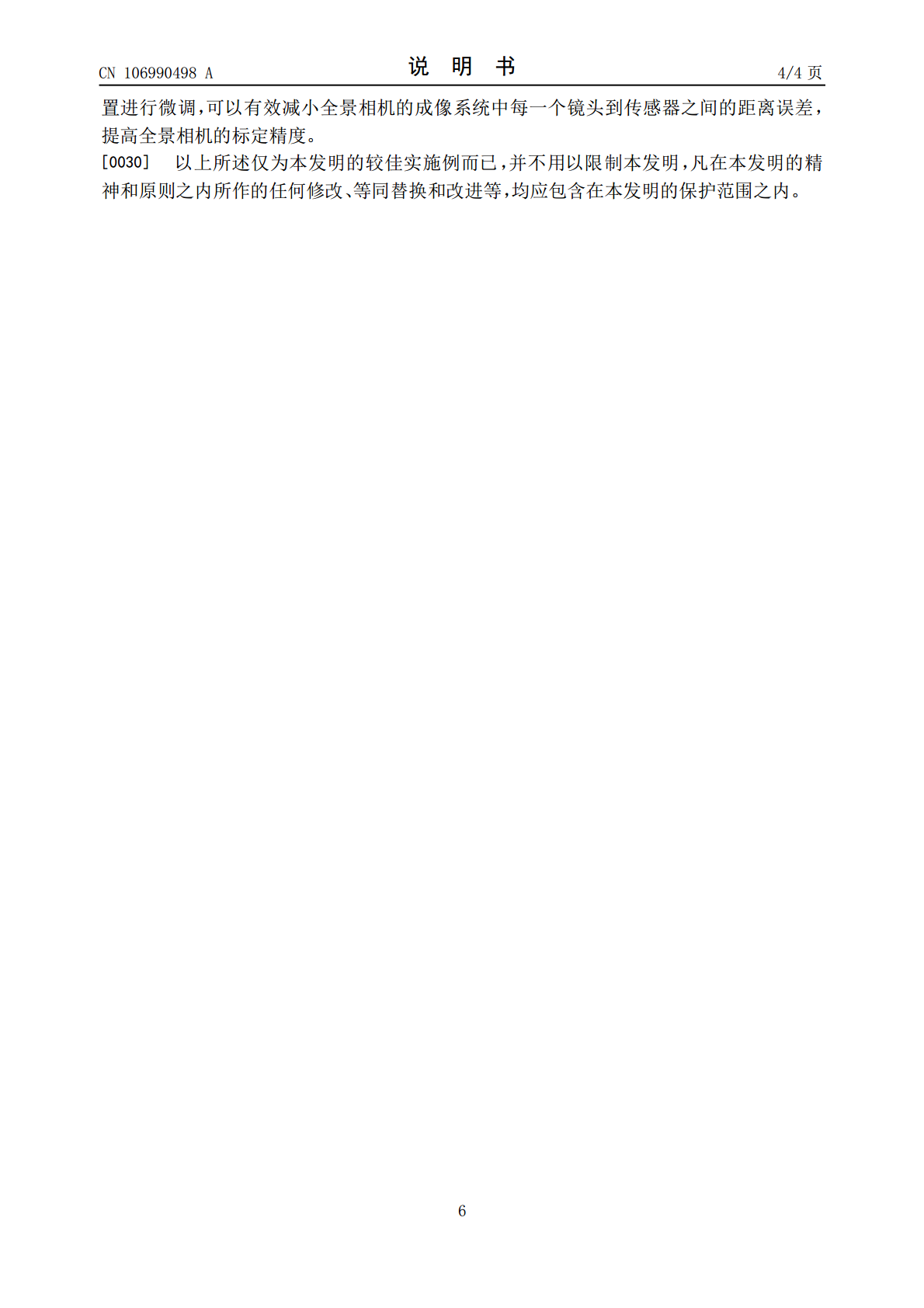
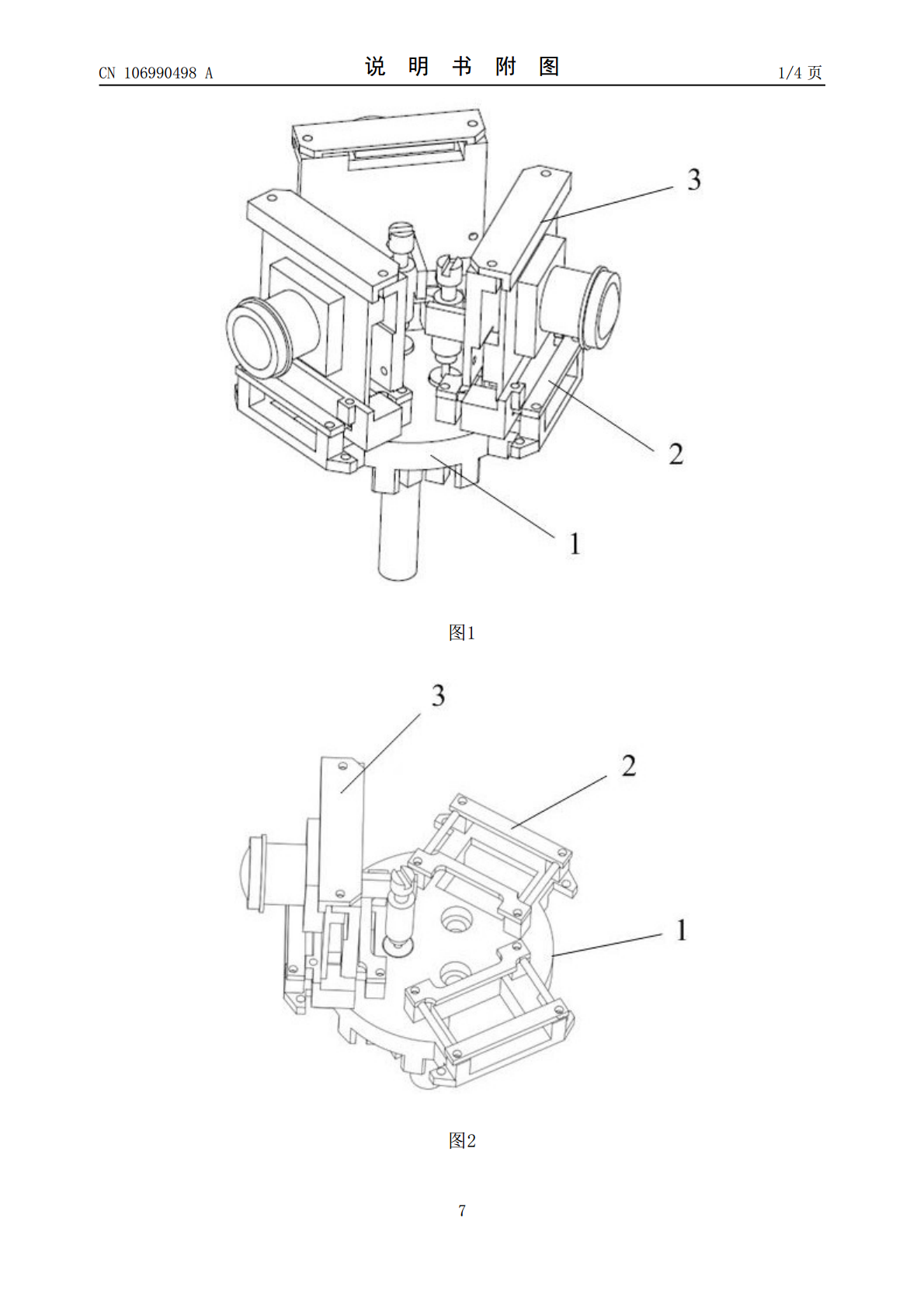
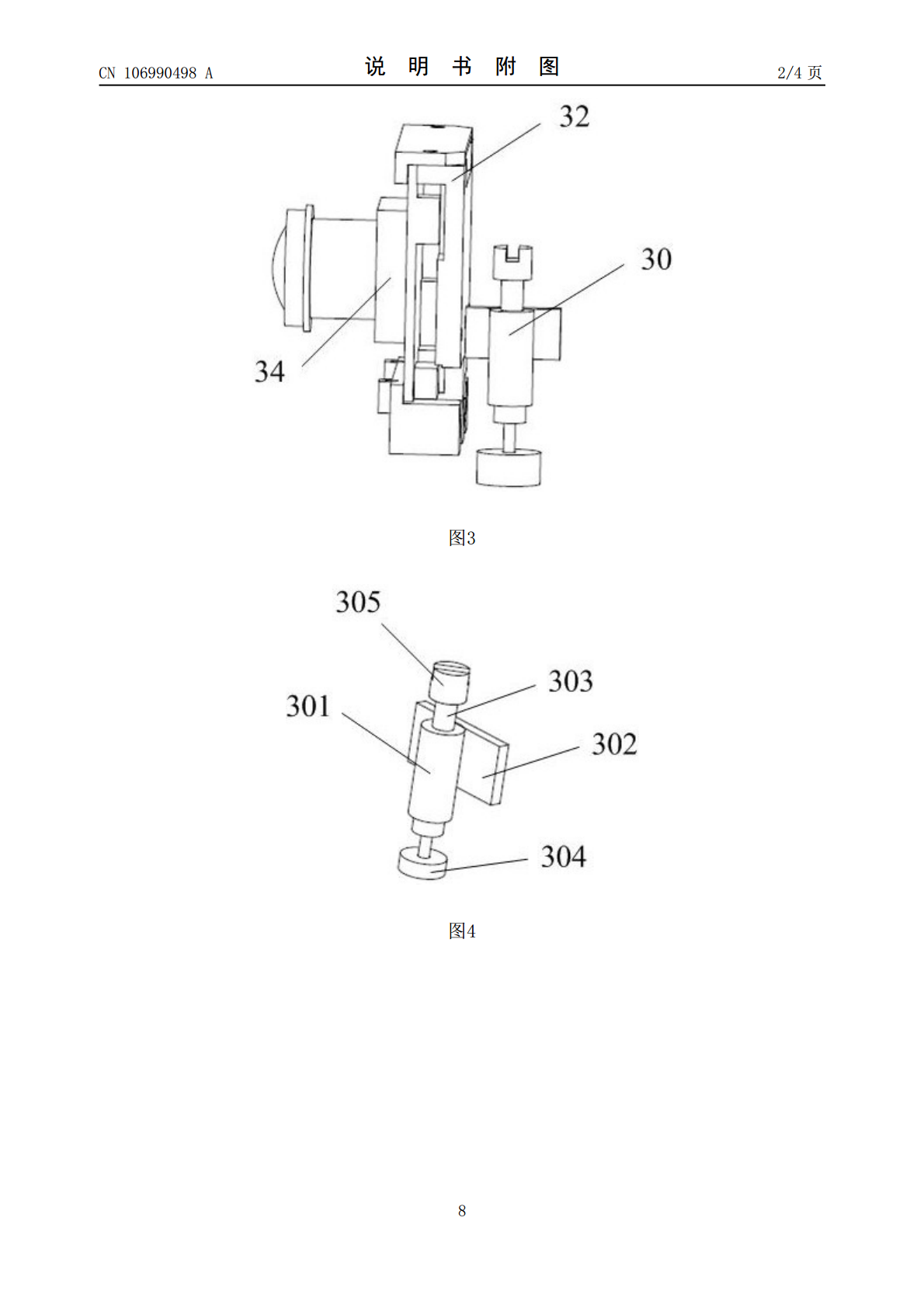
本发明公开了一种多镜头全景相机的镜头位置微调装置,包括圆形底盘、在所述圆形底盘的圆周上等间距且相互对称设置的若干个支撑架、以及设置在每一个所述支撑架上端与所述支撑架活动连接的镜头位置微调模块。本发明结构简单,设计紧凑,通过旋转微动齿轮带动微动齿条做前后直线运动,可以实现多个镜头的前后位置的微调操作,方便灵活,调节精度高,同时通过对多个镜头的位置进行微调,可以有效减小全景相机的成像系统中每一个镜头到传感器之间的距离误差,提高全景相机的标定精度。
一种全景相机镜头补光装置.pdf
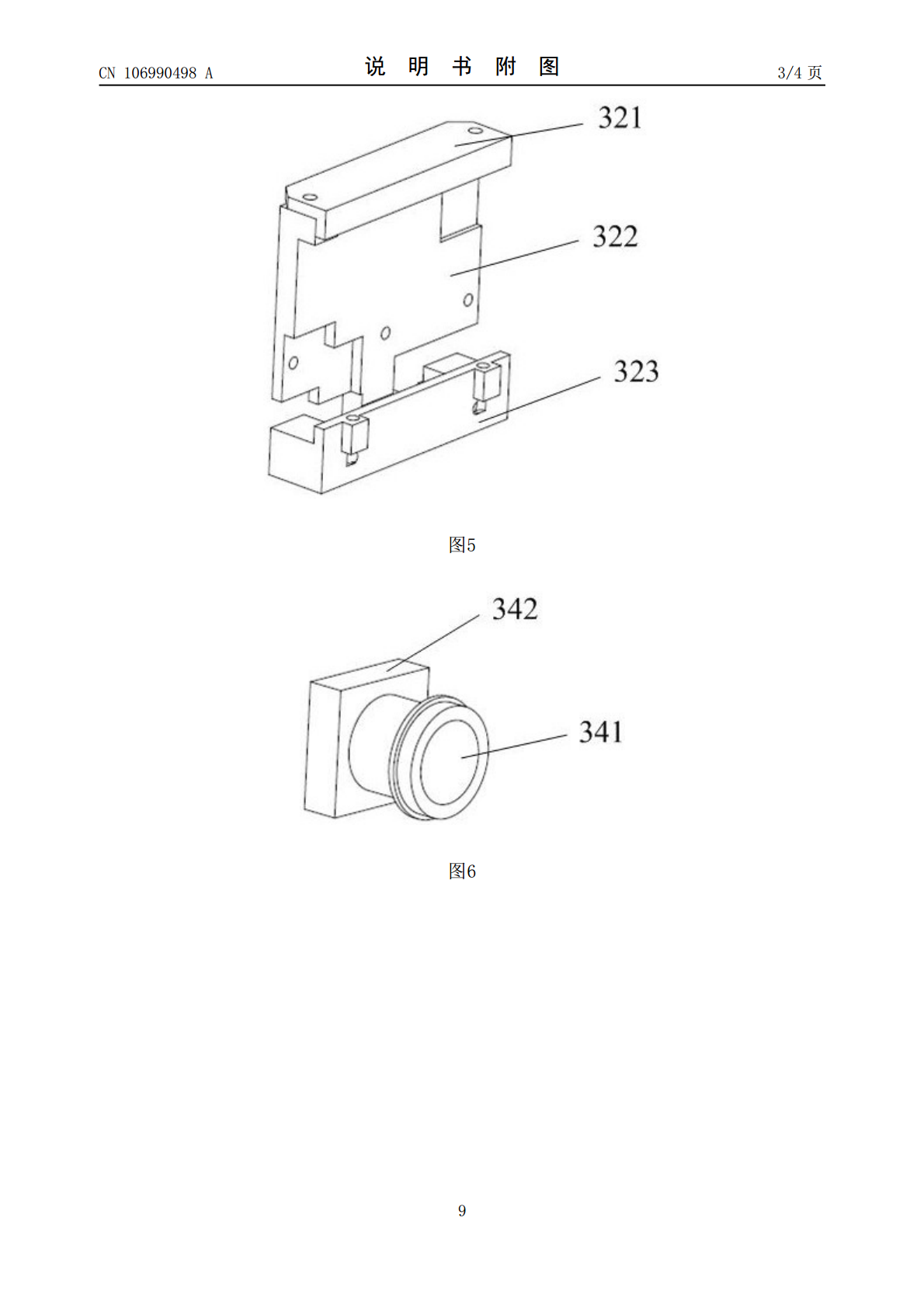
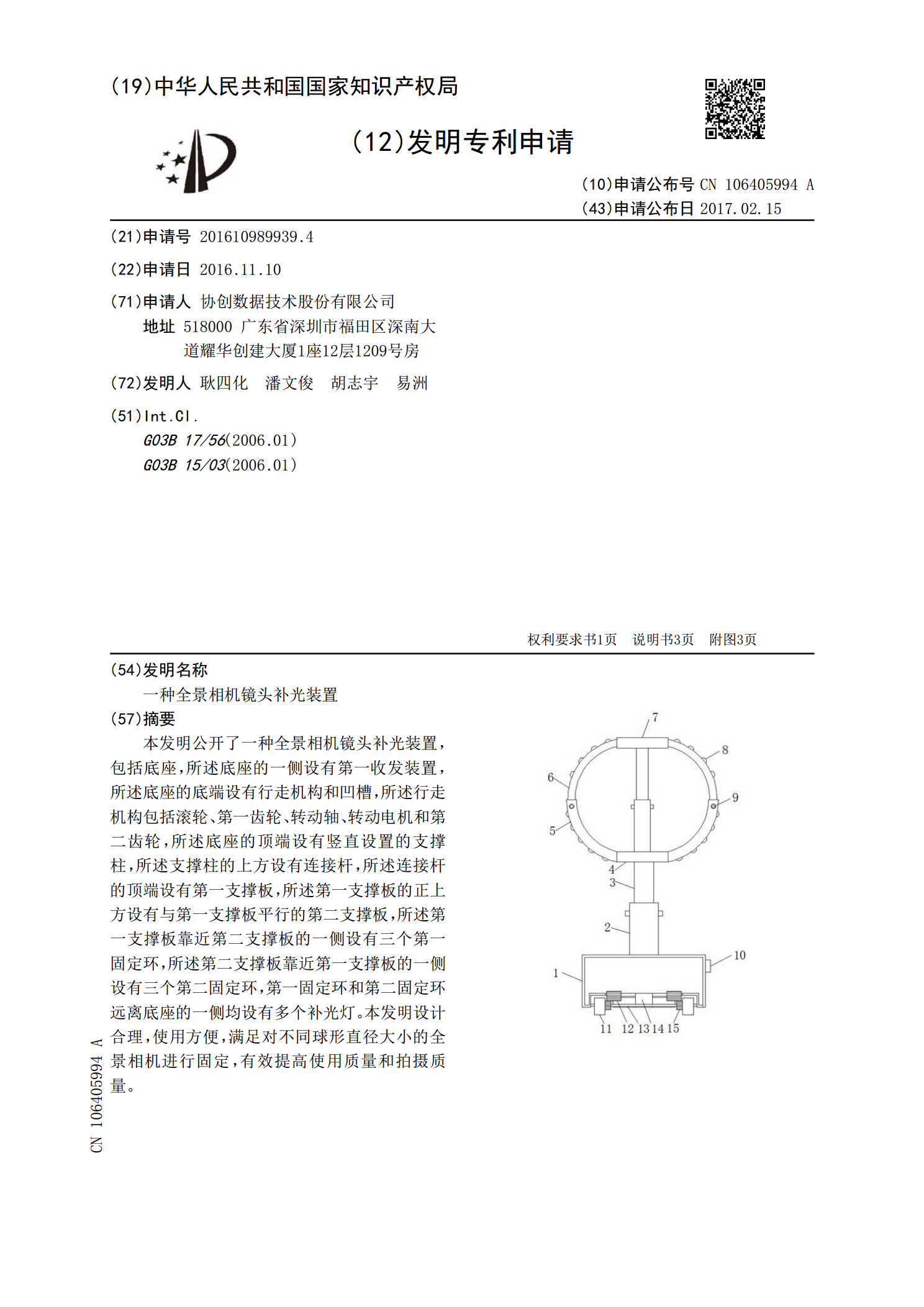
本发明公开了一种全景相机镜头补光装置,包括底座,所述底座的一侧设有第一收发装置,所述底座的底端设有行走机构和凹槽,所述行走机构包括滚轮、第一齿轮、转动轴、转动电机和第二齿轮,所述底座的顶端设有竖直设置的支撑柱,所述支撑柱的上方设有连接杆,所述连接杆的顶端设有第一支撑板,所述第一支撑板的正上方设有与第一支撑板平行的第二支撑板,所述第一支撑板靠近第二支撑板的一侧设有三个第一固定环,所述第二支撑板靠近第一支撑板的一侧设有三个第二固定环,第一固定环和第二固定环远离底座的一侧均设有多个补光灯。本发明设计合理,使用方
一种相机镜头模组、相机镜头光轴调节装置及双目相机.pdf
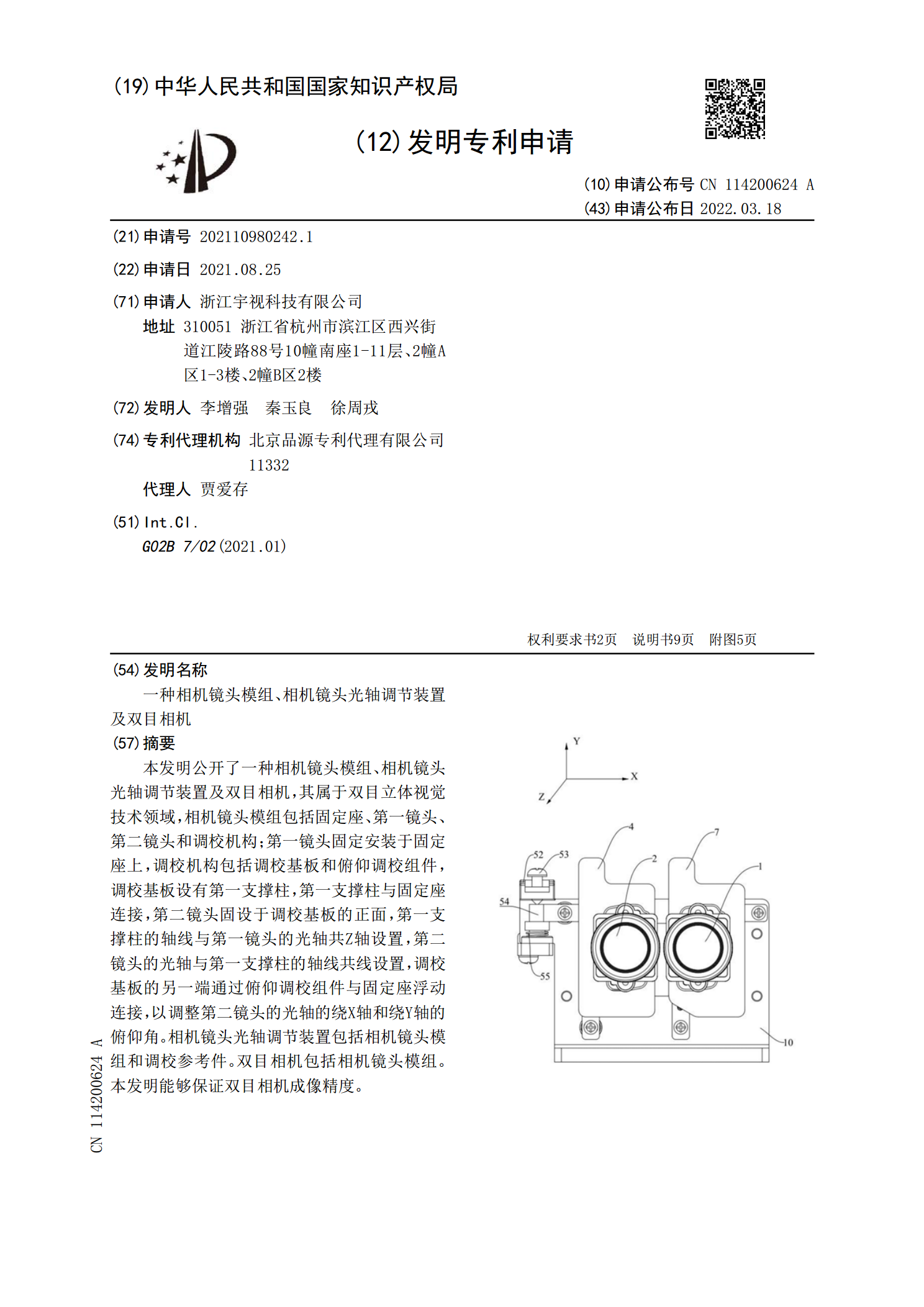
本发明公开了一种相机镜头模组、相机镜头光轴调节装置及双目相机,其属于双目立体视觉技术领域,相机镜头模组包括固定座、第一镜头、第二镜头和调校机构;第一镜头固定安装于固定座上,调校机构包括调校基板和俯仰调校组件,调校基板设有第一支撑柱,第一支撑柱与固定座连接,第二镜头固设于调校基板的正面,第一支撑柱的轴线与第一镜头的光轴共Z轴设置,第二镜头的光轴与第一支撑柱的轴线共线设置,调校基板的另一端通过俯仰调校组件与固定座浮动连接,以调整第二镜头的光轴的绕X轴和绕Y轴的俯仰角。相机镜头光轴调节装置包括相机镜头模组和调校

镜头驱动装置、镜头系统和相机系统.pdf
本申请涉及一种镜头驱动装置、镜头系统和相机系统。该镜头驱动装置包括:测量透镜固定装置中的磁体位置的关联磁场的霍尔传感模块;磁体位置与透镜固定装置中固定的透镜的位置同步变化;根据关联磁场的变化情况,向驱动模块输出对应的驱动信号的处理模块;基于驱动信号,驱动透镜固定装置产生平移运动,以使透镜固定装置的位置维持稳定的驱动模块;处理模块连接霍尔传感模块和驱动模块。上述镜头驱动装置,得益于霍尔传感模块的结构简单、尺寸小等优点,且由于驱动模块仅用于驱动透镜固定装置产生平移运动,功耗相对较小,对应的尺寸也较小,有利于减

全景立体球视觉装置的镜头位置校准方法研究.docx
全景立体球视觉装置的镜头位置校准方法研究全景立体球视觉装置是一种高级的视觉设备,它集成了多个摄像头、光学透镜和图像处理器,可以同时捕捉整个场景的360度全景图像,并将其转换为立体图像,实现三维空间的效果。然而,由于每个摄像头的位置和方向都不同,这些图像可能存在畸变和重叠,并且需要对其进行校准。本文将介绍几种常见的全景立体球视觉装置的镜头位置校准方法,并探讨其优劣之处。一、传统的基于物体特征的校准方法这种方法是最早引入的校准方法。它通过检测相邻图像的特征点,如边缘、直线、角点等,来确定相机的位置和方向。这个