
一种基于短路效应的柔性触觉传感器及其制备方法.pdf

小代****回来

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于短路效应的柔性触觉传感器及其制备方法.pdf
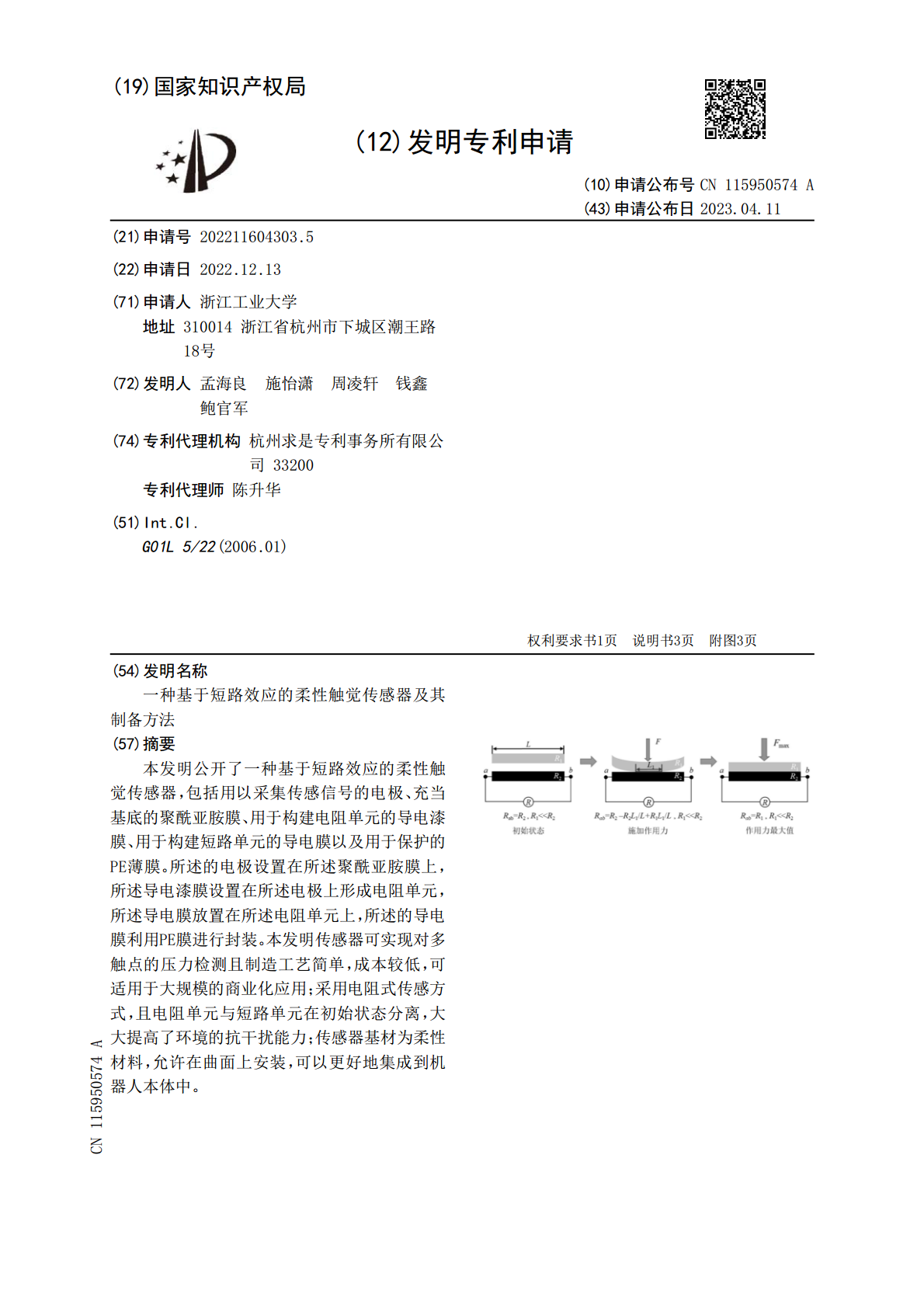
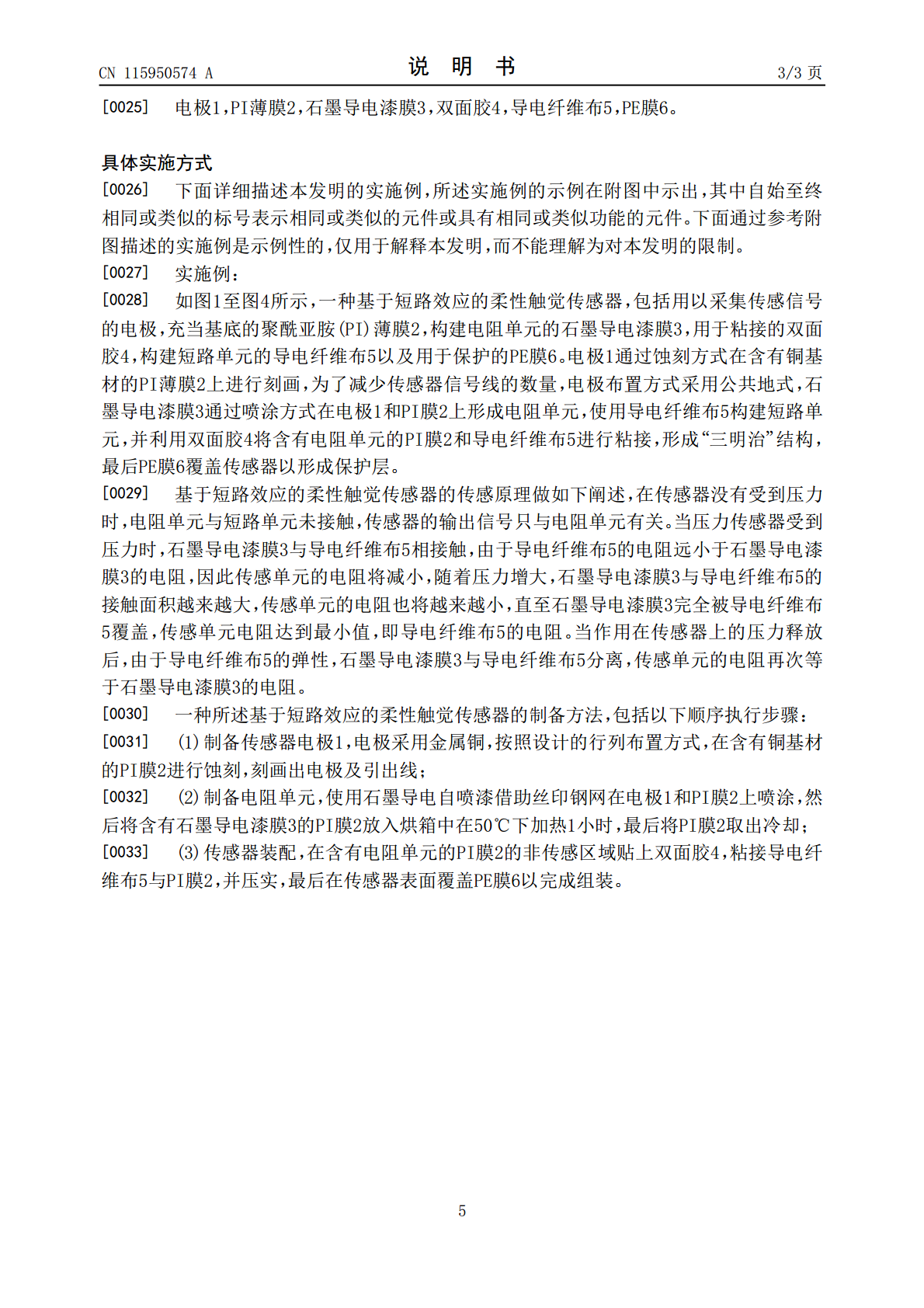
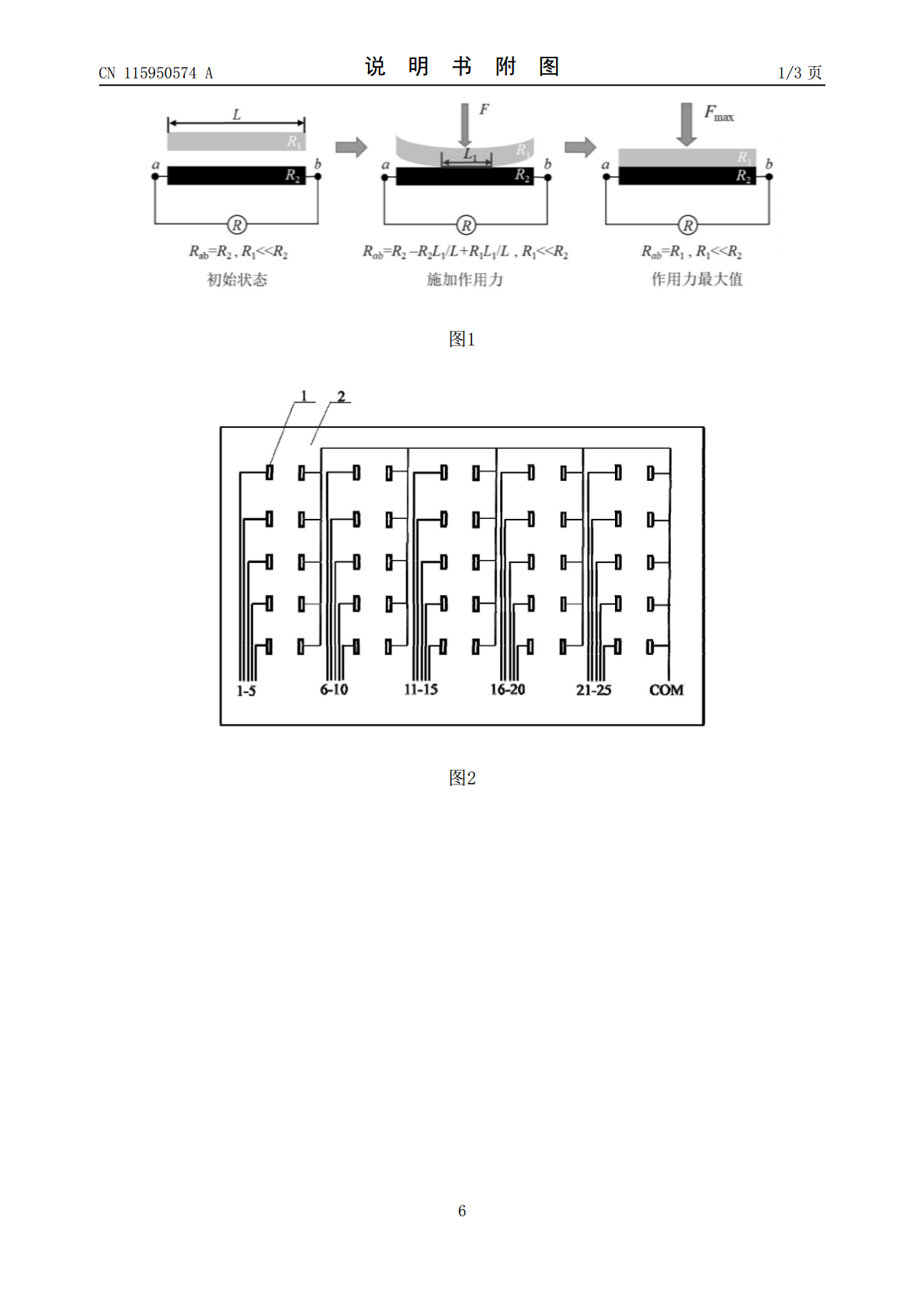
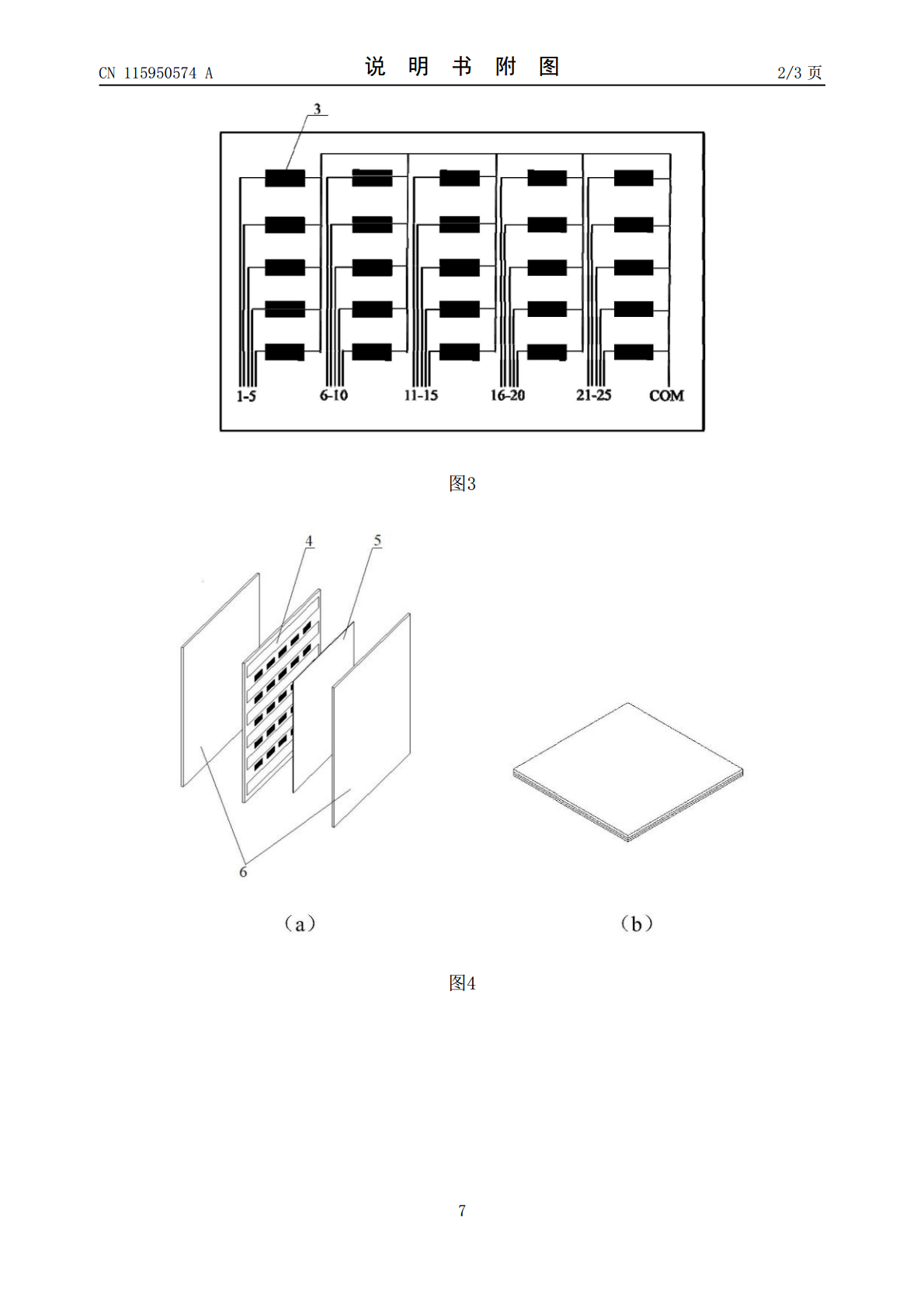
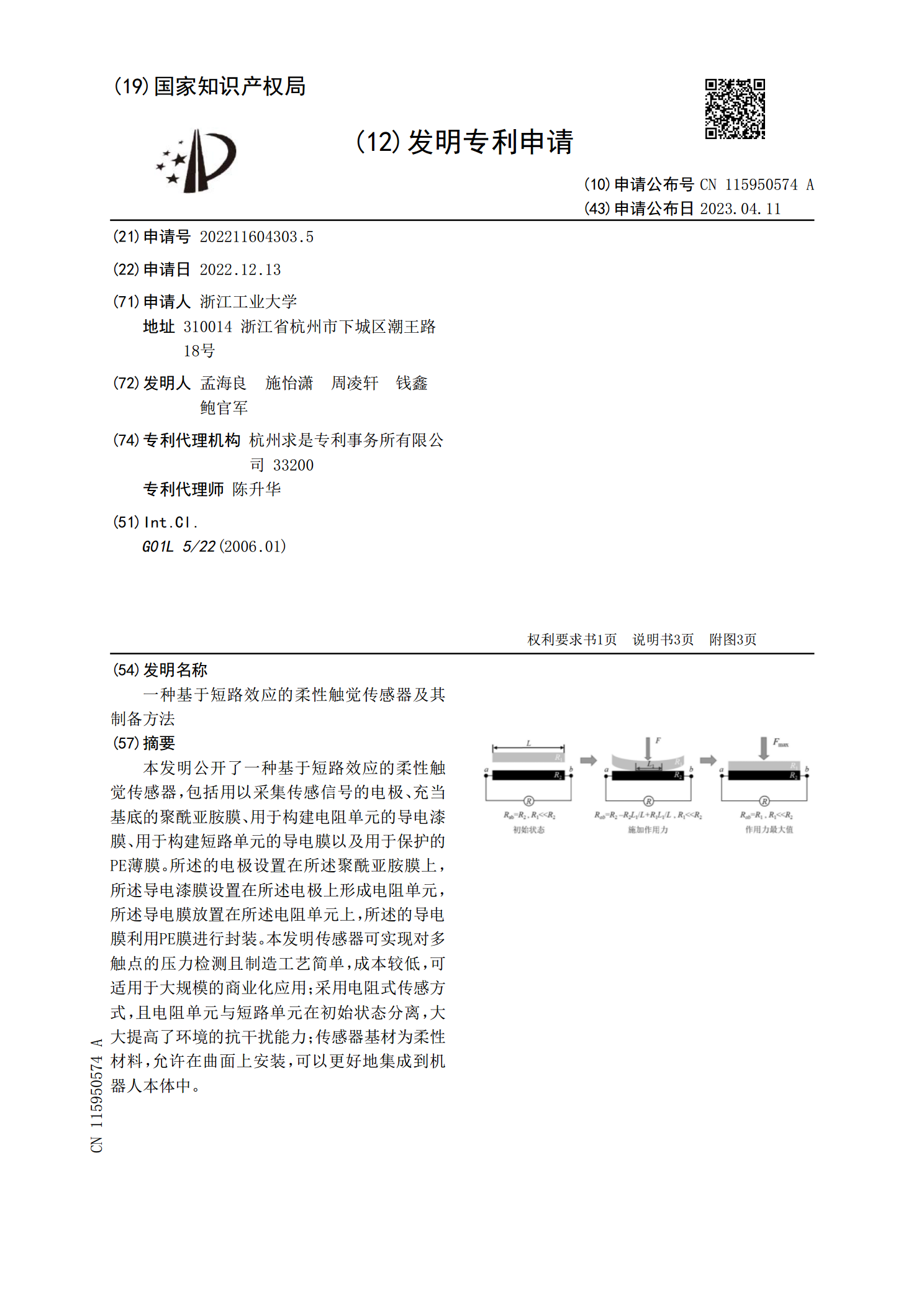
本发明公开了一种基于短路效应的柔性触觉传感器,包括用以采集传感信号的电极、充当基底的聚酰亚胺膜、用于构建电阻单元的导电漆膜、用于构建短路单元的导电膜以及用于保护的PE薄膜。所述的电极设置在所述聚酰亚胺膜上,所述导电漆膜设置在所述电极上形成电阻单元,所述导电膜放置在所述电阻单元上,所述的导电膜利用PE膜进行封装。本发明传感器可实现对多触点的压力检测且制造工艺简单,成本较低,可适用于大规模的商业化应用;采用电阻式传感方式,且电阻单元与短路单元在初始状态分离,大大提高了环境的抗干扰能力;传感器基材为柔性材料,允
驻极体柔性触觉传感器及其制备方法与充电方法.pdf
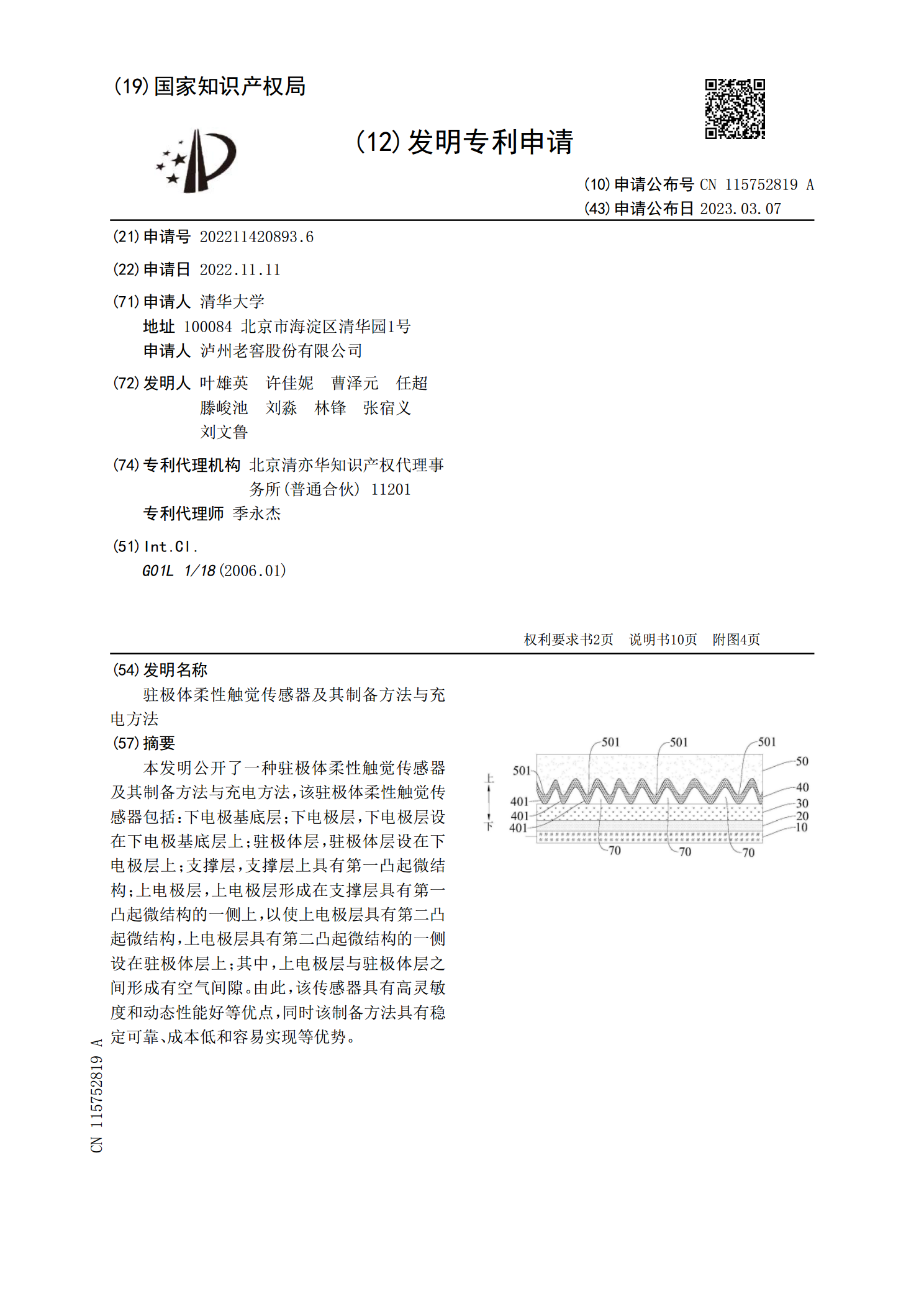
本发明公开了一种驻极体柔性触觉传感器及其制备方法与充电方法,该驻极体柔性触觉传感器包括:下电极基底层;下电极层,下电极层设在下电极基底层上;驻极体层,驻极体层设在下电极层上;支撑层,支撑层上具有第一凸起微结构;上电极层,上电极层形成在支撑层具有第一凸起微结构的一侧上,以使上电极层具有第二凸起微结构,上电极层具有第二凸起微结构的一侧设在驻极体层上;其中,上电极层与驻极体层之间形成有空气间隙。由此,该传感器具有高灵敏度和动态性能好等优点,同时该制备方法具有稳定可靠、成本低和容易实现等优势。
一种水凝胶柔性触觉传感器的制备方法及应用.pdf
一种水凝胶柔性触觉传感器的制备方法及应用,属于柔性可穿戴传感领域。主要包括以下步骤:(1)选用具有氢键络合作用的聚丙烯酰胺和聚乙烯吡咯烷酮制备双网络交联水凝胶;(2)通过引发剂过硫酸铵和交联剂N,N’‑亚甲基双丙烯酰胺引发丙烯酰胺单体的交联聚合,形成具有化学交联结构和氢键交联结构的超分子水凝胶;(3)在水凝胶制备液中加入导电聚合物络合物聚(3,4‑乙烯二氧噻吩):聚苯乙烯磺酸,提高水凝胶的电导率;(4)将导电水凝胶前驱体溶液注入到固定模具中,采用紫外光引发自由基聚合手段,制备成柔性触觉传感器。所制备的导电
具有贴附性和透气性的柔性触觉传感器及其制备方法.pdf
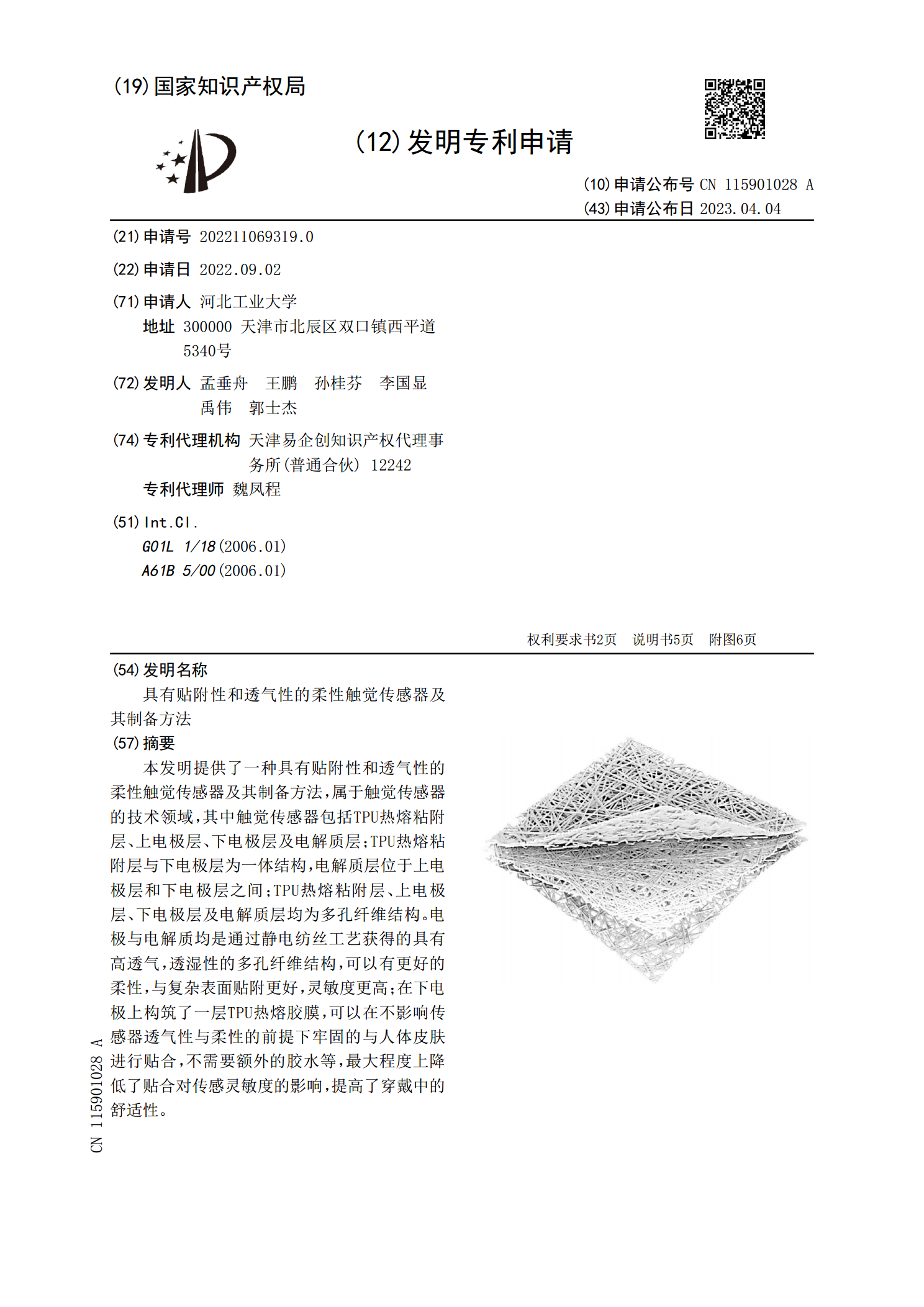
本发明提供了一种具有贴附性和透气性的柔性触觉传感器及其制备方法,属于触觉传感器的技术领域,其中触觉传感器包括TPU热熔粘附层、上电极层、下电极层及电解质层;TPU热熔粘附层与下电极层为一体结构,电解质层位于上电极层和下电极层之间;TPU热熔粘附层、上电极层、下电极层及电解质层均为多孔纤维结构。电极与电解质均是通过静电纺丝工艺获得的具有高透气,透湿性的多孔纤维结构,可以有更好的柔性,与复杂表面贴附更好,灵敏度更高;在下电极上构筑了一层TPU热熔胶膜,可以在不影响传感器透气性与柔性的前提下牢固的与人体皮肤进行
柔性传感器及其制备方法.pdf
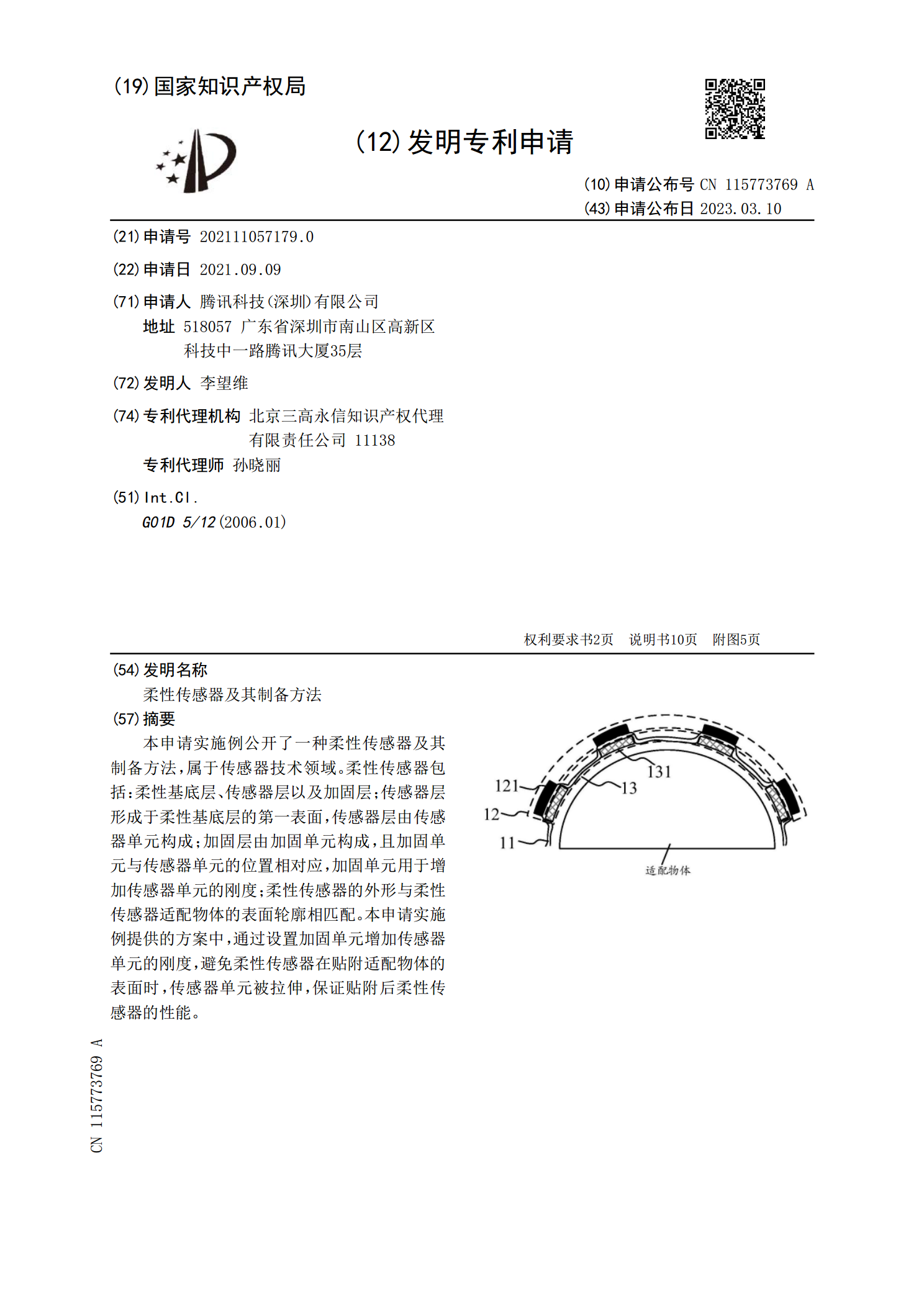
本申请实施例公开了一种柔性传感器及其制备方法,属于传感器技术领域。柔性传感器包括:柔性基底层、传感器层以及加固层;传感器层形成于柔性基底层的第一表面,传感器层由传感器单元构成;加固层由加固单元构成,且加固单元与传感器单元的位置相对应,加固单元用于增加传感器单元的刚度;柔性传感器的外形与柔性传感器适配物体的表面轮廓相匹配。本申请实施例提供的方案中,通过设置加固单元增加传感器单元的刚度,避免柔性传感器在贴附适配物体的表面时,传感器单元被拉伸,保证贴附后柔性传感器的性能。