
智能无人蜂蜜采收机及其控制方法.pdf

玉怡****文档

1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能无人蜂蜜采收机及其控制方法.pdf
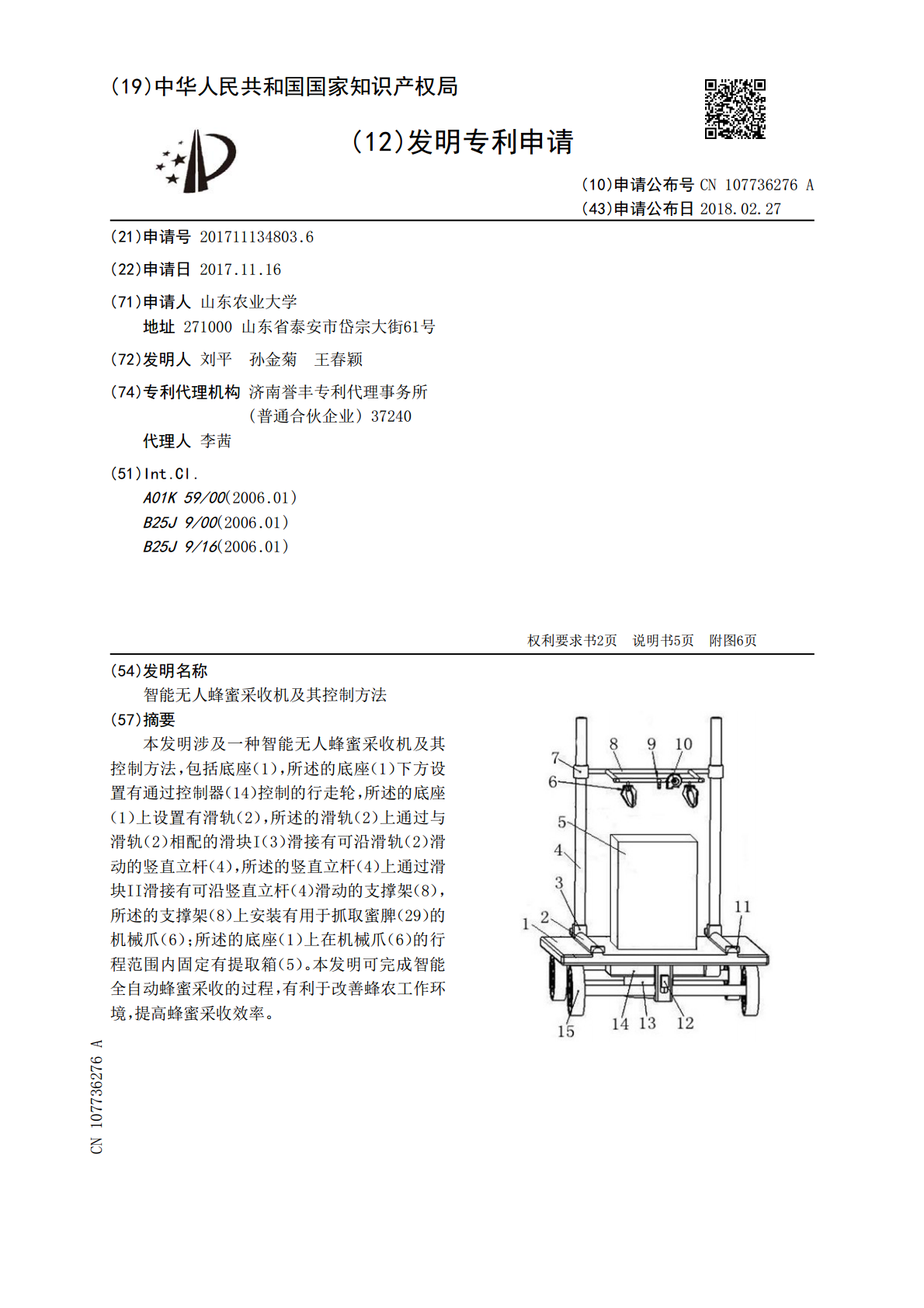
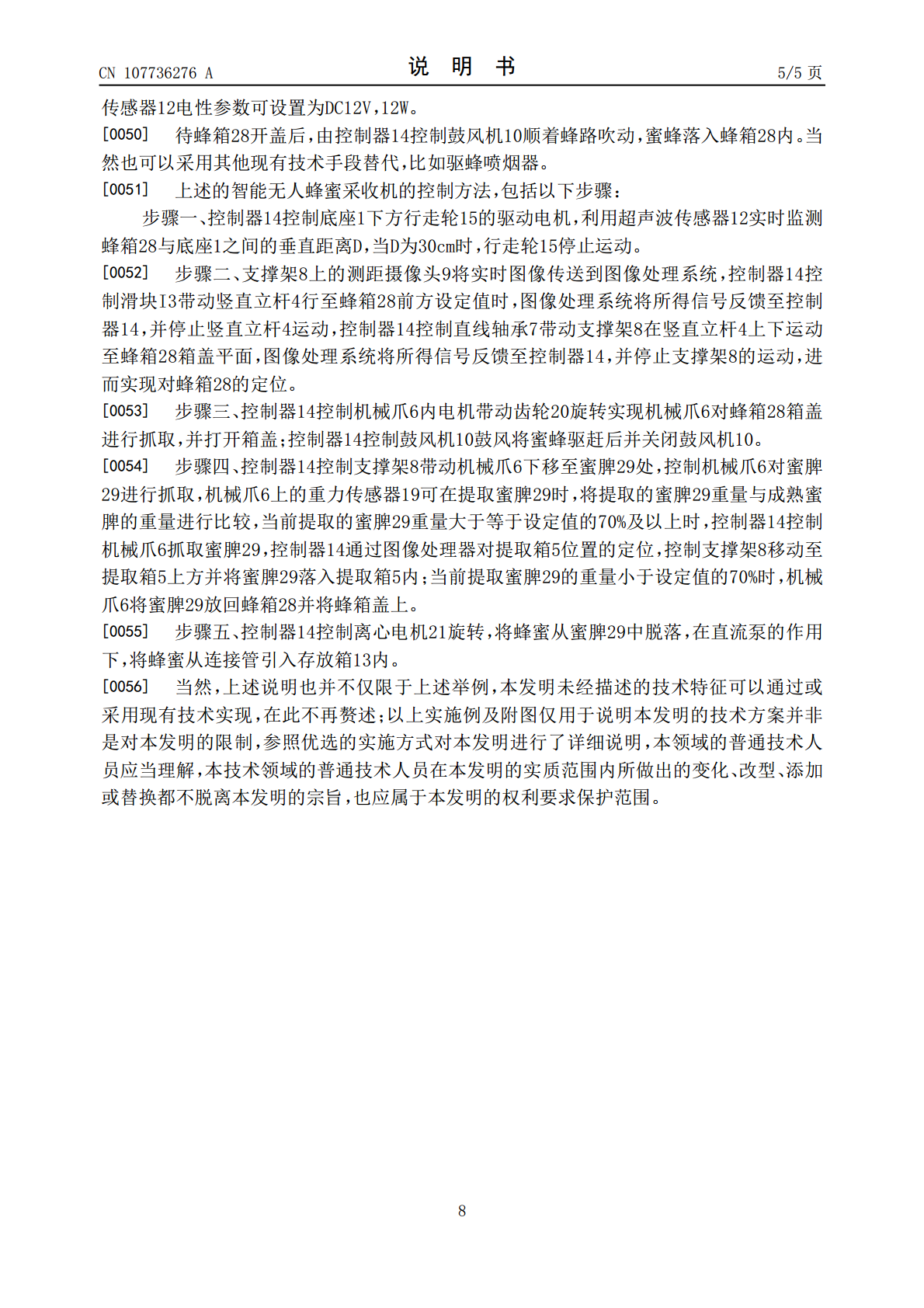
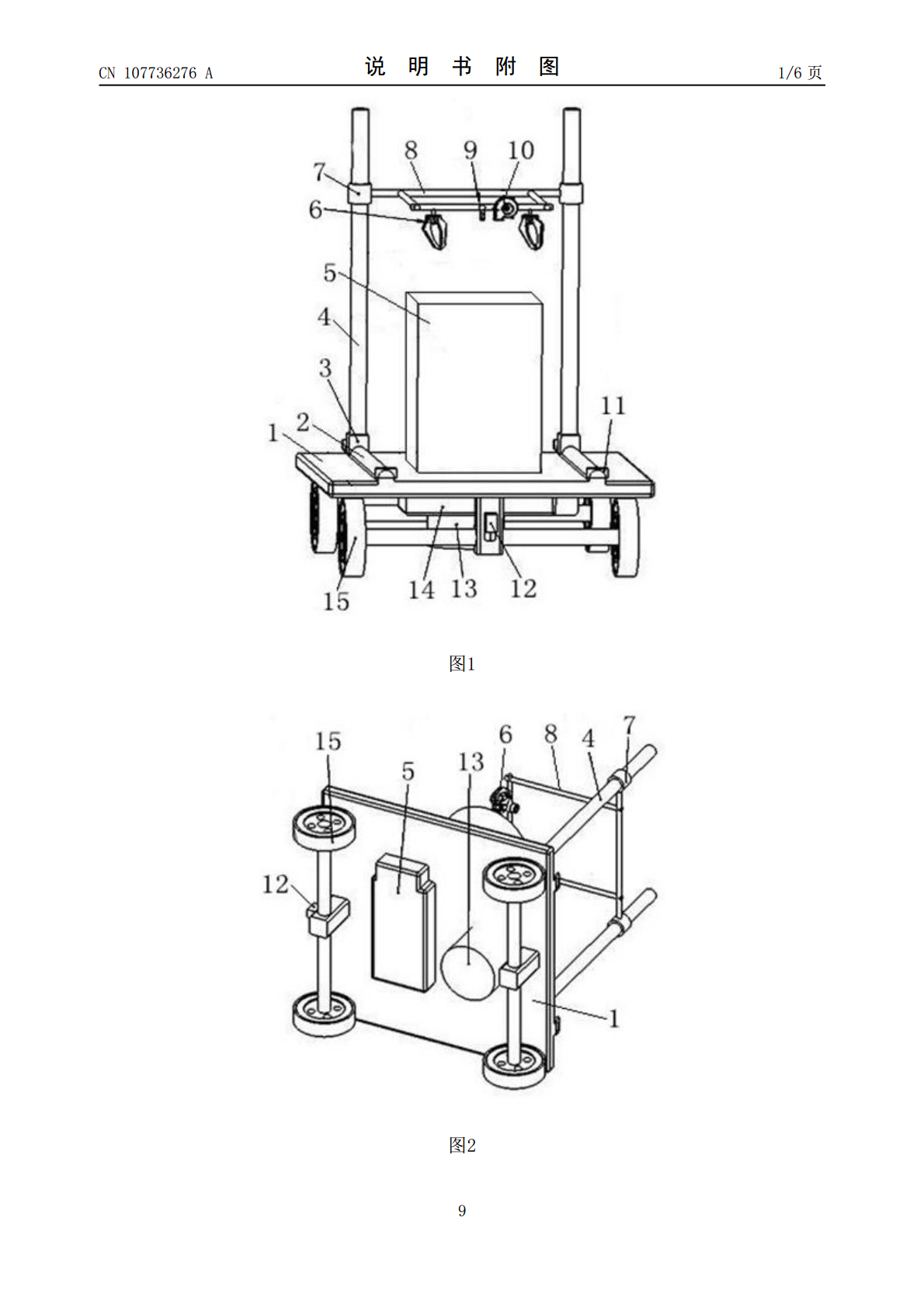
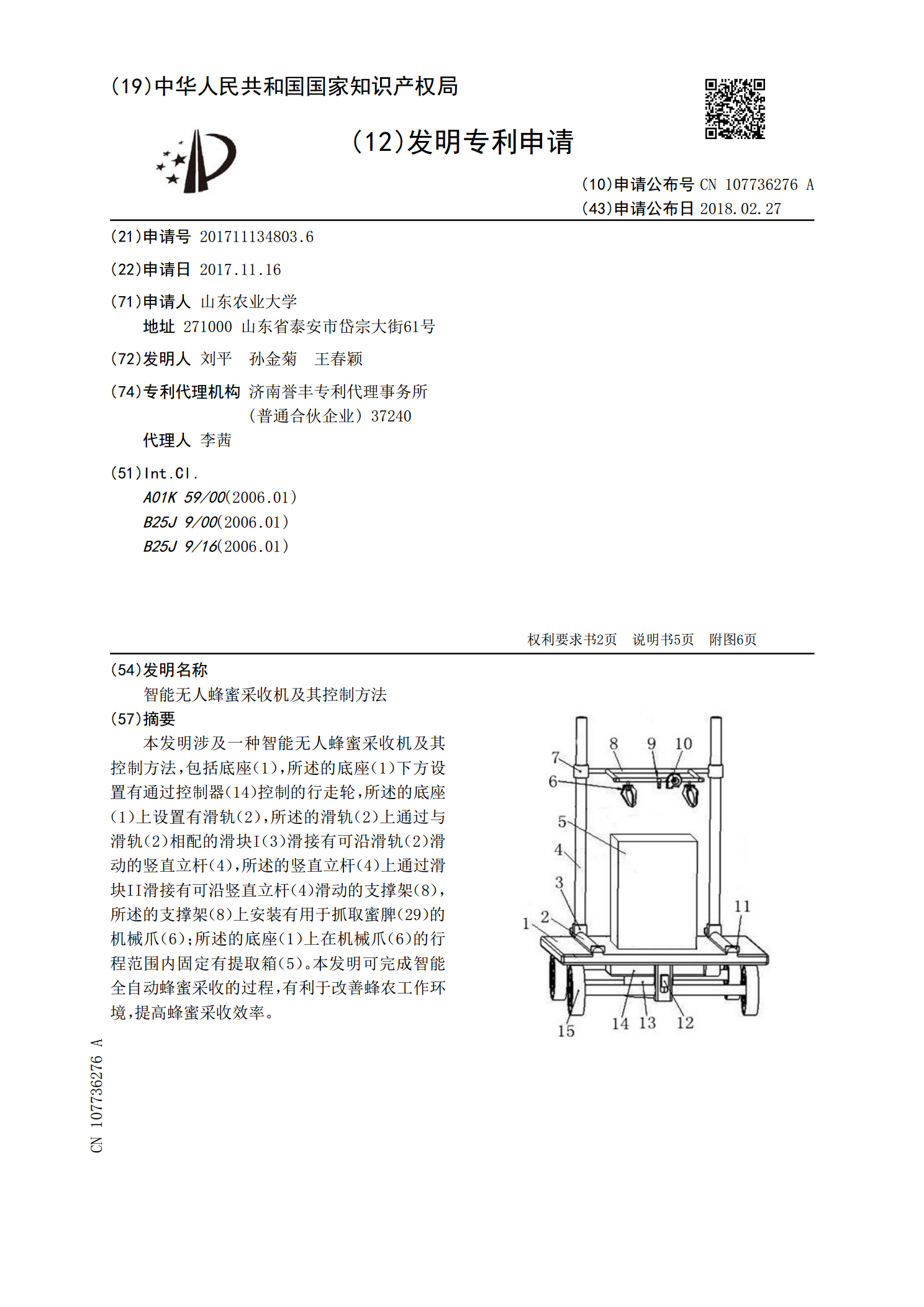
本发明涉及一种智能无人蜂蜜采收机及其控制方法,包括底座(1),所述的底座(1)下方设置有通过控制器(14)控制的行走轮,所述的底座(1)上设置有滑轨(2),所述的滑轨(2)上通过与滑轨(2)相配的滑块I(3)滑接有可沿滑轨(2)滑动的竖直立杆(4),所述的竖直立杆(4)上通过滑块II滑接有可沿竖直立杆(4)滑动的支撑架(8),所述的支撑架(8)上安装有用于抓取蜜脾(29)的机械爪(6);所述的底座(1)上在机械爪(6)的行程范围内固定有提取箱(5)。本发明可完成智能全自动蜂蜜采收的过程,有利于改善蜂农工作

油茶果采收机及其智能控制设备.pdf
本申请涉及一种油茶果采收机及其智能控制设备,智能控制设备包括中央控制器和前置传感装置,前置传感装置连接中央控制器,中央控制器连接油茶果采收机的采摘装置;前置传感装置用于检测油茶果的果树信息,并发送检测数据至中央控制器;中央控制器根据检测数据控制采摘装置靠近并夹持树杆后,控制采摘装置振动采摘油茶果,实现结合检测数据自动采摘控制,避免人工操作失误损坏油茶树,提高了使用便利性。
智能无人帆船及其控制方法.pdf
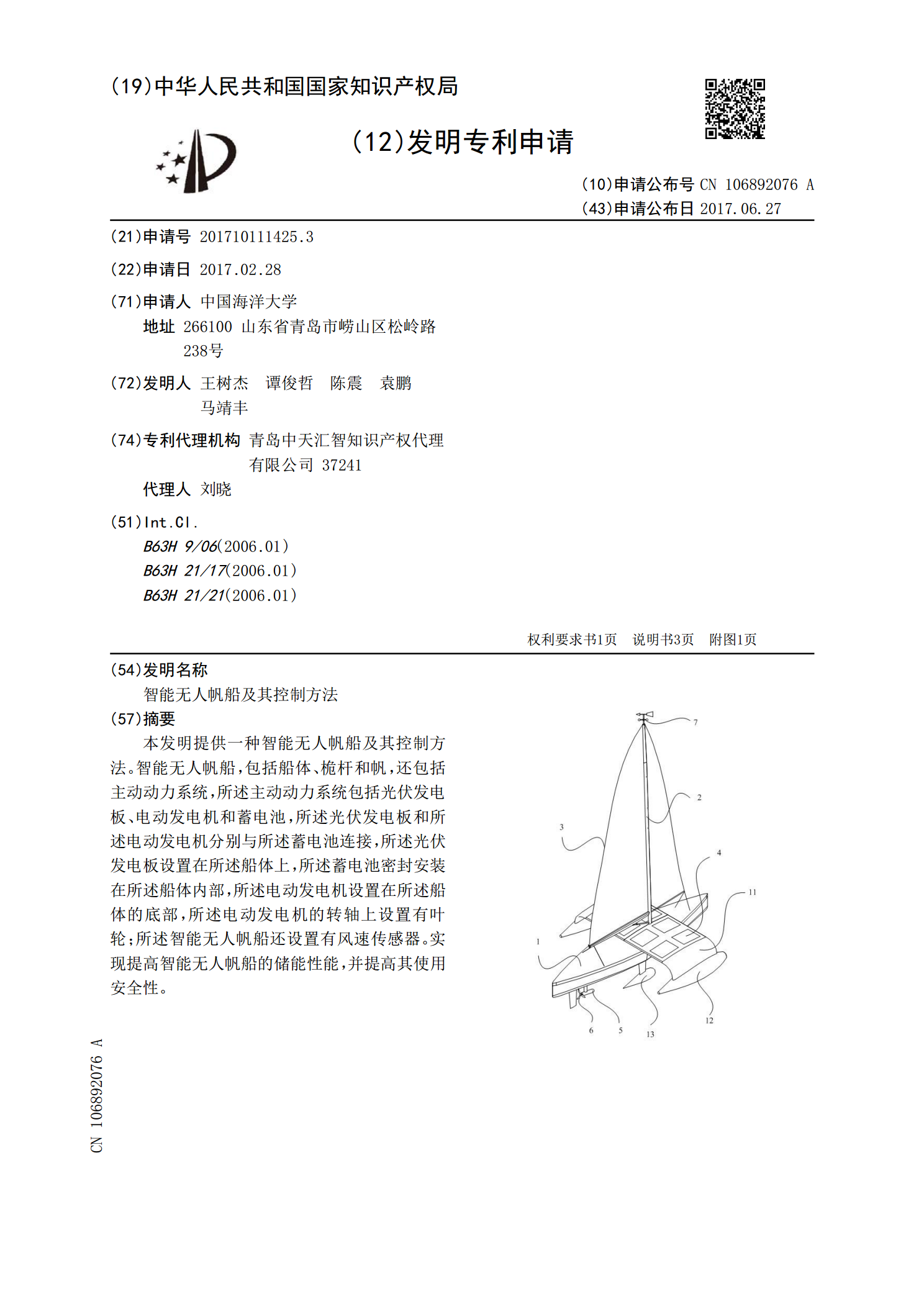
本发明提供一种智能无人帆船及其控制方法。智能无人帆船,包括船体、桅杆和帆,还包括主动动力系统,所述主动动力系统包括光伏发电板、电动发电机和蓄电池,所述光伏发电板和所述电动发电机分别与所述蓄电池连接,所述光伏发电板设置在所述船体上,所述蓄电池密封安装在所述船体内部,所述电动发电机设置在所述船体的底部,所述电动发电机的转轴上设置有叶轮;所述智能无人帆船还设置有风速传感器。实现提高智能无人帆船的储能性能,并提高其使用安全性。

履带式蜂蜜全程自动采收机器及其控制方法.pdf
本发明涉及一种履带式蜂蜜全程自动采收机器及其控制方法,包括履带式行走机构(2),所述的履带式行走机构(2)的甲板(1)上从前至后依次设置有机械臂和蜂蜜提取装置(3);所述的蜂蜜提取装置(3)包括连接有出料管(17)的离心桶(16),所述的离心桶(16)内连接有通过中心轴(15)转动的内框(14)。本发明通过机械化操作,能够实现蜂蜜全自动采收且工作效率高。

智能无人装车系统的智能小车及其位移控制方法.pdf
本发明涉及智能无人装车系统的智能小车及其位移控制方法,应用于垛装产品智能无人装车系统,所述智能小车底部设置有舵轮、辅助万向轮、第一从动轮组和第二从动轮组,所述智能小车底部左右两端分别设置有第三测距传感器和第四测距传感器,所述舵轮驱动模块可以将舵轮的中心转轴在水平面内进行旋转从而改变舵轮的前进方向,通过行进过程中监测第三测距传感器和第四测距传感器的测距值差异,判断是否发生倾斜,避免发生倾翻。