
一种机器人多自由度夹持器.pdf

一吃****继勇


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人多自由度夹持器.pdf
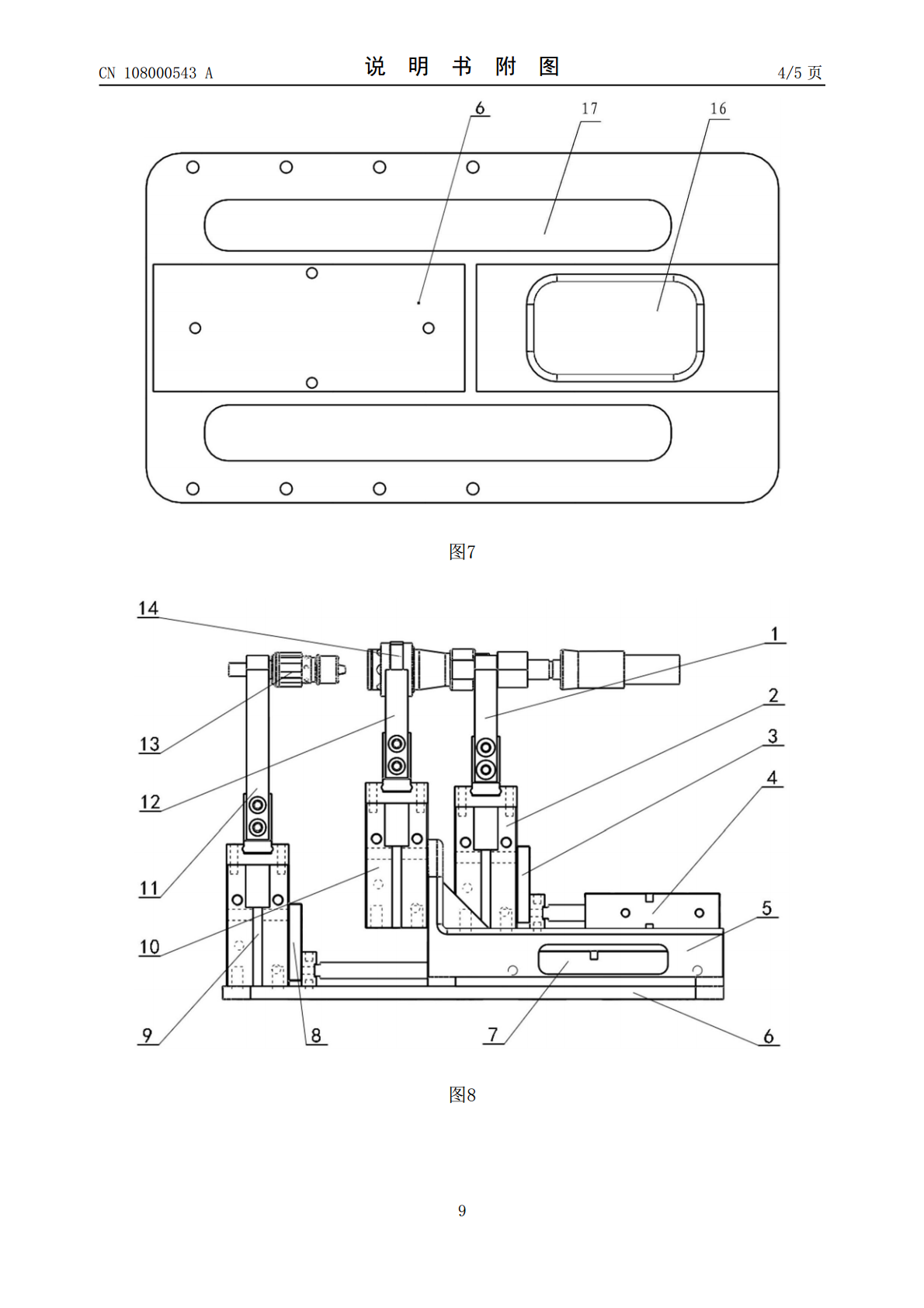
本发明涉及一种机器人多自由度夹持器,夹爪支撑架安装在底板上,短行程双轴气缸安装在夹爪支撑架上,输出端与气动夹爪A连接,夹爪手指A与气动夹爪A的输出端相连;长行程双轴气缸安装在底板上,长行程双轴气缸的输出端与气动夹爪B连接,夹爪手指B与气动夹爪B的输出端相连;气动夹爪C安装在夹爪支撑架上,位于气动夹爪A与气动夹爪B之间,夹爪手指C与气动夹爪C的输出端相连;夹爪手指A与气动夹爪A通过短行程双轴气缸的驱动在夹爪支撑架上往复运动,夹爪手指B与气动夹爪B通过长行程双轴气缸的驱动在底板上往复运动。本发明采用仿人手操作

一种多自由度夹持机器人.pdf
本发明涉及一种机器人,更具体的说是一种多自由度夹持机器人,包括底架、高度机构、转动座、夹持手和伸出机构,本发明中的夹头可以以转轴为轴进行旋转,并且夹头的高度可以根据需要调整,夹头还可以向前水平伸出和缩回,便于机器人夹持物体做出各种动作,便于将夹持的物体移动至不同位置。所述高度机构的下端铰接在底架上,转动座转动连接在高度机构的上端,夹持手固定连接在转动座上,伸出机构的一端滑动连接在底架上,伸出机构的另一端间隙配合插在夹持手上。

一种机器人夹持器.pdf
本发明公开了一种机器人夹持器,属于机器配件技术领域,其中,包括套筒B,套筒B为一端有开口的空腔;至少两个同步夹紧机构,两个同步夹紧机构分别间隔贯穿固定安装于套筒B的内部和外侧;同步带,同步带连接两个同步夹紧机构。铅笔被两个同步夹紧机构同步夹紧于套筒B内部,铅笔的两个径向面的径向多点受力,解决了目前至少使用三个大头梅花螺栓不能同步对铅笔夹紧且夹紧铅笔后倾斜的问题,在实现机器人手臂快速完成更换不同铅笔的基础上,保证了铅笔在运动时笔头不会轻易折断。
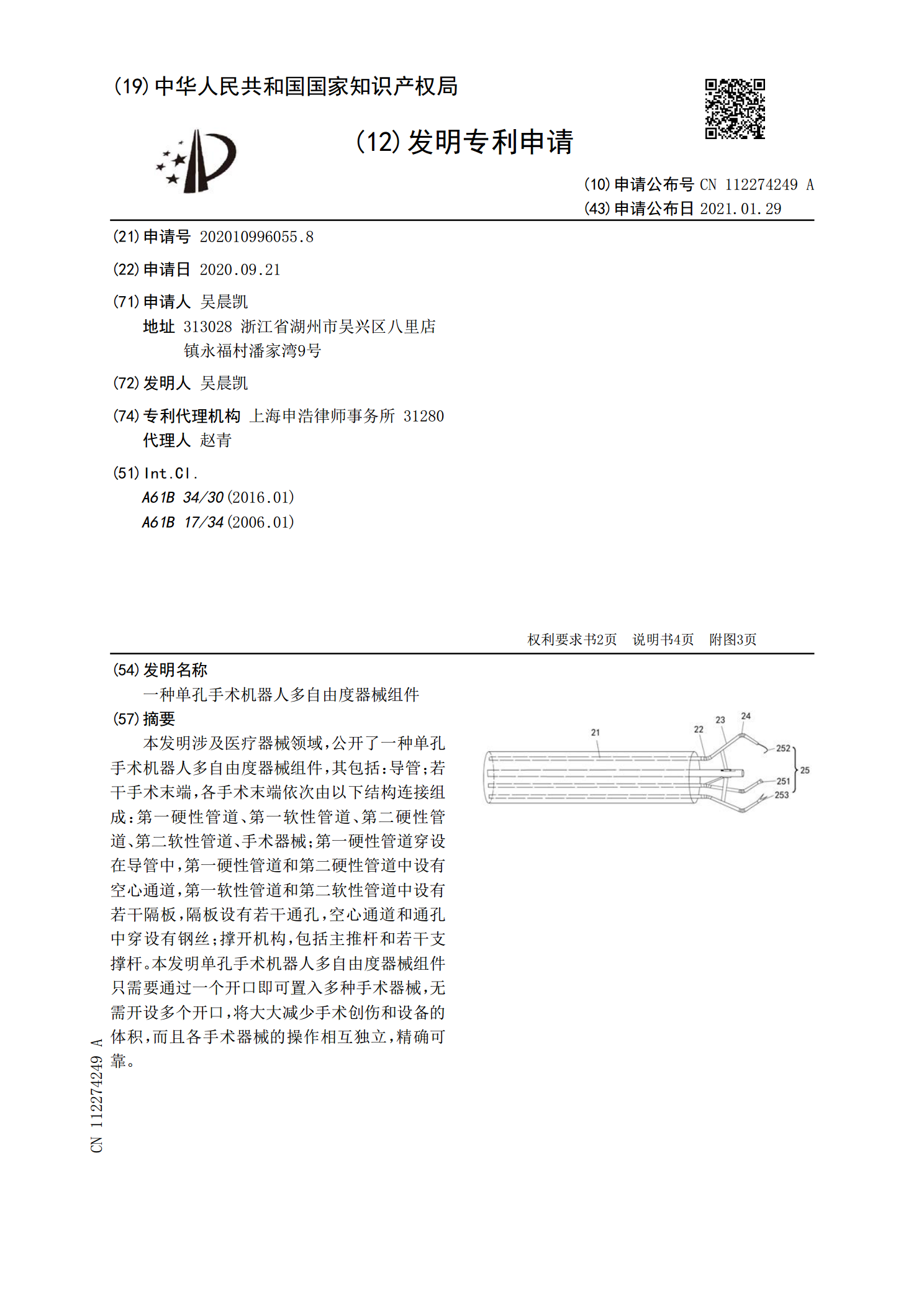
一种单孔手术机器人多自由度器械组件.pdf
本发明涉及医疗器械领域,公开了一种单孔手术机器人多自由度器械组件,其包括:导管;若干手术末端,各手术末端依次由以下结构连接组成:第一硬性管道、第一软性管道、第二硬性管道、第二软性管道、手术器械;第一硬性管道穿设在导管中,第一硬性管道和第二硬性管道中设有空心通道,第一软性管道和第二软性管道中设有若干隔板,隔板设有若干通孔,空心通道和通孔中穿设有钢丝;撑开机构,包括主推杆和若干支撑杆。本发明单孔手术机器人多自由度器械组件只需要通过一个开口即可置入多种手术器械,无需开设多个开口,将大大减少手术创伤和设备的体积,

一种行走机器人多自由度踝关节机构.pdf
本发明提供一种行走机器人多自由度踝关节机构,包括机器人主体、旋转电机、齿轮轴、压板一、电动推杆、压板二、卷布辊以及微电机,压板一安装在腿部下端面,腿部下端面设有内腔,电动推杆装配在内腔内部上侧,压板二上端面安装有固定盒,旋转电机装配在固定盒内部下侧,旋转电机通过齿轮轴与压板一下端面相连接,压板一内部固定有齿轮轴,压板二安装在压板一下侧,该设计解决了原有机器人调节结构不够充足的问题,卷布辊安装在活动腔内部,微电机装配在定位孔内部,该设计解决了原有机器人没有隐藏效果的问题,本发明结构合理,便与调节,隐藏性好,