
一种机臂可拆卸的无人机.pdf

春岚****23


1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机臂可拆卸的无人机.pdf
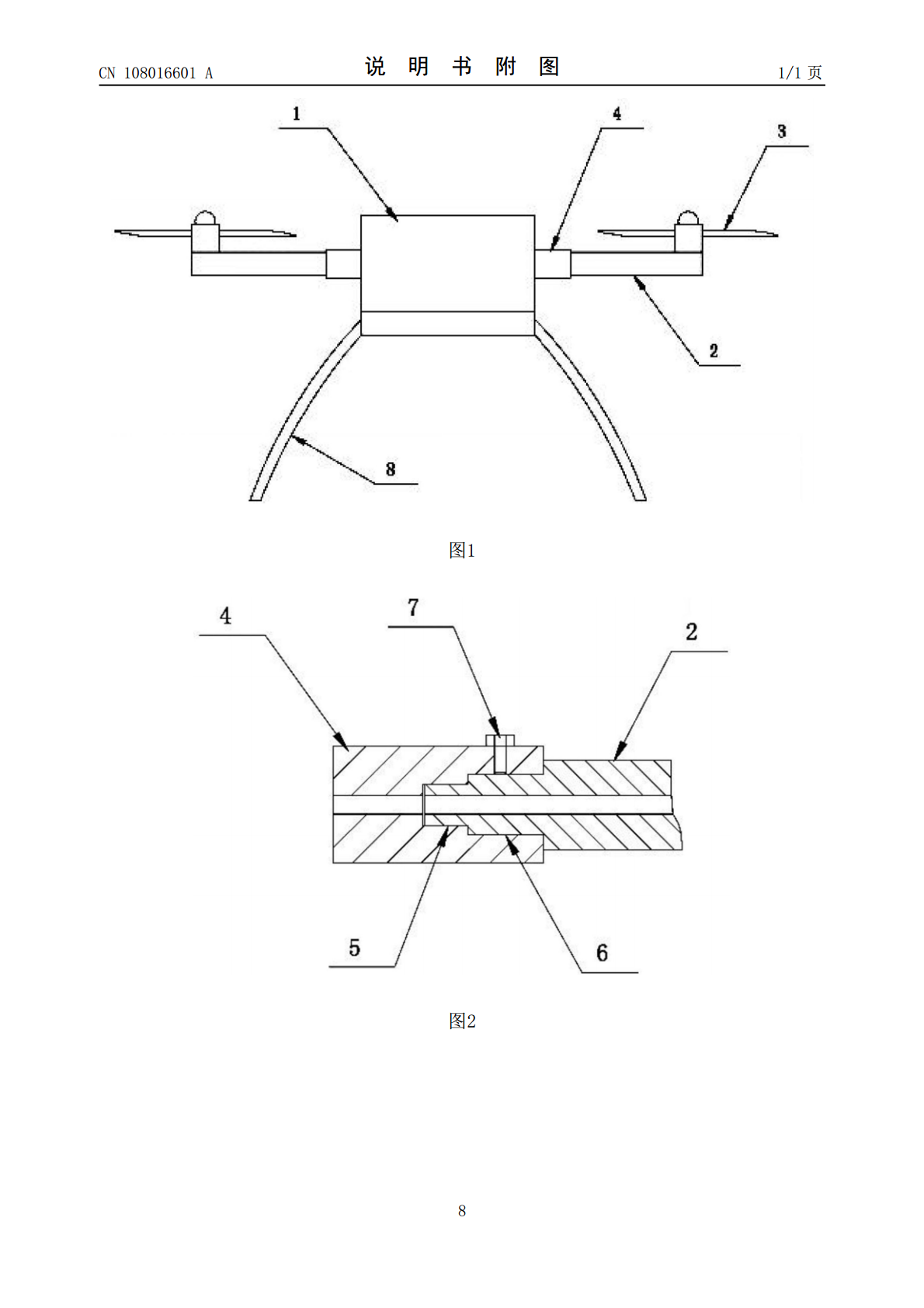
本发明提供一种机臂可拆卸的无人机,包括:无人机本体、机臂以及安装在所述机臂上的螺旋桨,所述无人机本体上环形等间距分布有多个机臂连接座,所述机臂的端部依次设置有与所述机臂连接座配合连接的圆轴段和方轴段,所述机臂连接座上安装有紧固螺栓,所述紧固螺栓抵靠在所述方轴段上;所述无人机本体底部设置有支撑架。本发明机臂可拆卸的无人机的机臂可拆装地安装在无人机本体的连接座上,并通过紧固螺栓固定在连接座上,安装和拆卸方便简单,便于后续的更换和维修。
一种机臂及无人机.pdf
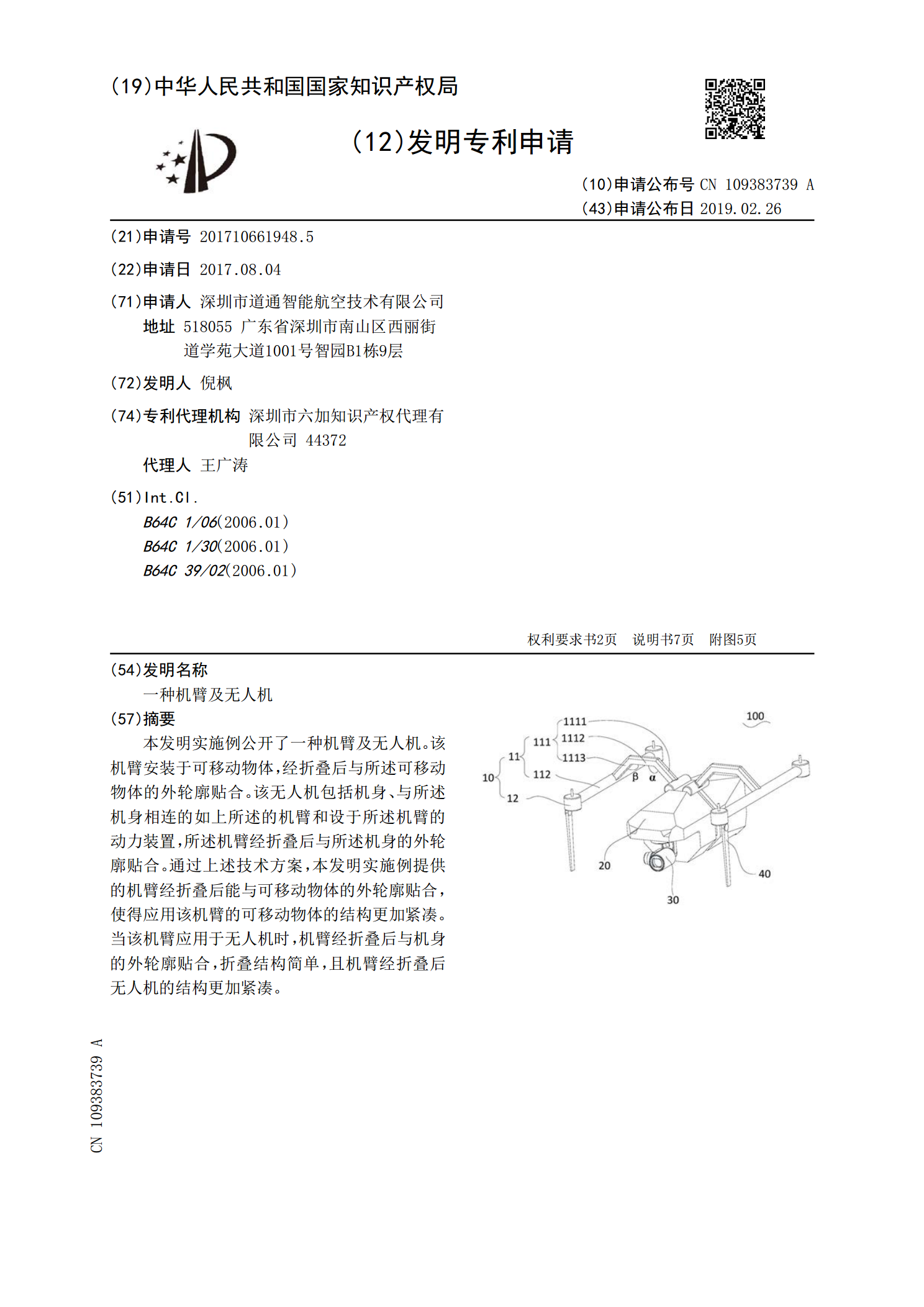
本发明实施例公开了一种机臂及无人机。该机臂安装于可移动物体,经折叠后与所述可移动物体的外轮廓贴合。该无人机包括机身、与所述机身相连的如上所述的机臂和设于所述机臂的动力装置,所述机臂经折叠后与所述机身的外轮廓贴合。通过上述技术方案,本发明实施例提供的机臂经折叠后能与可移动物体的外轮廓贴合,使得应用该机臂的可移动物体的结构更加紧凑。当该机臂应用于无人机时,机臂经折叠后与机身的外轮廓贴合,折叠结构简单,且机臂经折叠后无人机的结构更加紧凑。

一种无人机机臂连接组件及无人机.pdf
本发明实施例公开了一种无人机机臂连接组件及无人机,该无人机机臂连接组件包括用于连接无人机的机身延伸机臂的内连接件和用于连接无人机机臂的外连接件,所述内连接件套设于所述机身延伸机臂的外周,所述外连接件套设于所述无人机机臂的外周,所述内连接件和所述外连接件相连接以使所述机身延伸机臂与无人机机臂相连。所述无人机包括上述的机身延伸机臂、无人机机臂和无人机机臂连接组件。本发明实施例的无人机机臂连接组件能安全稳固、方便快捷地将无人机机身和机臂进行连接,无人机机臂连接组件连接无人机机身和机臂后密封性好,有很好的防水、防

一种无人机机臂快拆.pdf
本发明涉及无人机领域,具体来讲为一种无人机机臂快拆,其包括:固定构件与偏心紧固组件;固定构件包括,机身固定部与机臂固定部,其中机身固定部将固定构件与机身紧密连接;机臂固定部使固定构件与机臂有效配合,机臂固定部带有突耳用来连接偏心紧固组件;偏心紧固组件包括,丝杆、调节螺母、凸轮定位轴、滑套以及带有凸轮端的扳手;丝杆上套有与扳手凸轮端和机臂固定部配合的滑套,丝杆一端连接调节螺母,另一端装有凸轮定位轴,带有凸轮端的扳手可以绕凸轮定位轴转动,利用扳手凸轮端半径变化来改变机臂固定部的开口距,使套在机臂固定部内的机臂
一种可折弯无人机机臂及无人机.pdf
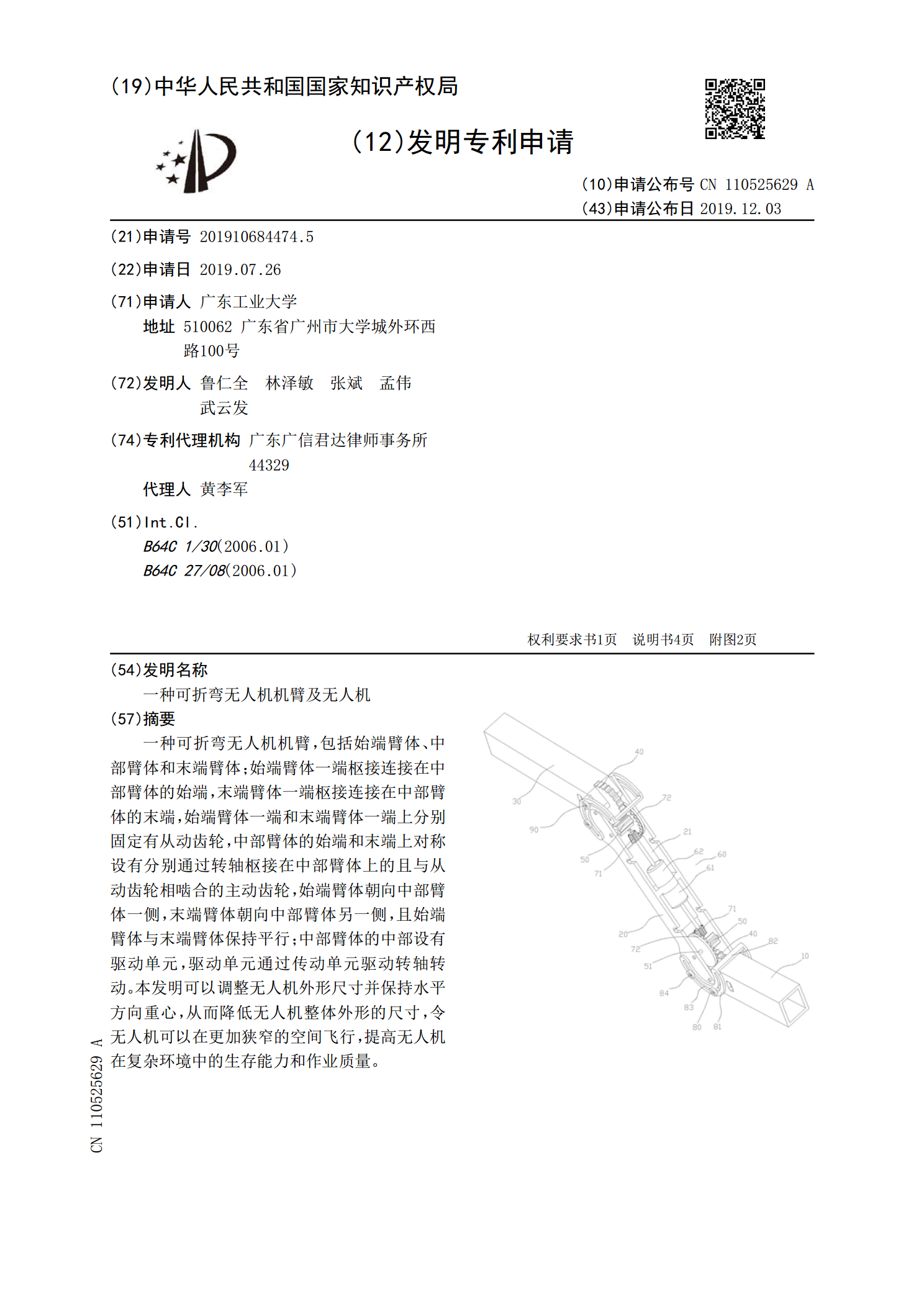
一种可折弯无人机机臂,包括始端臂体、中部臂体和末端臂体;始端臂体一端枢接连接在中部臂体的始端,末端臂体一端枢接连接在中部臂体的末端,始端臂体一端和末端臂体一端上分别固定有从动齿轮,中部臂体的始端和末端上对称设有分别通过转轴枢接在中部臂体上的且与从动齿轮相啮合的主动齿轮,始端臂体朝向中部臂体一侧,末端臂体朝向中部臂体另一侧,且始端臂体与末端臂体保持平行;中部臂体的中部设有驱动单元,驱动单元通过传动单元驱动转轴转动。本发明可以调整无人机外形尺寸并保持水平方向重心,从而降低无人机整体外形的尺寸,令无人机可以在更