
一种人体行走助行器.pdf

是向****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种人体行走助行器.pdf
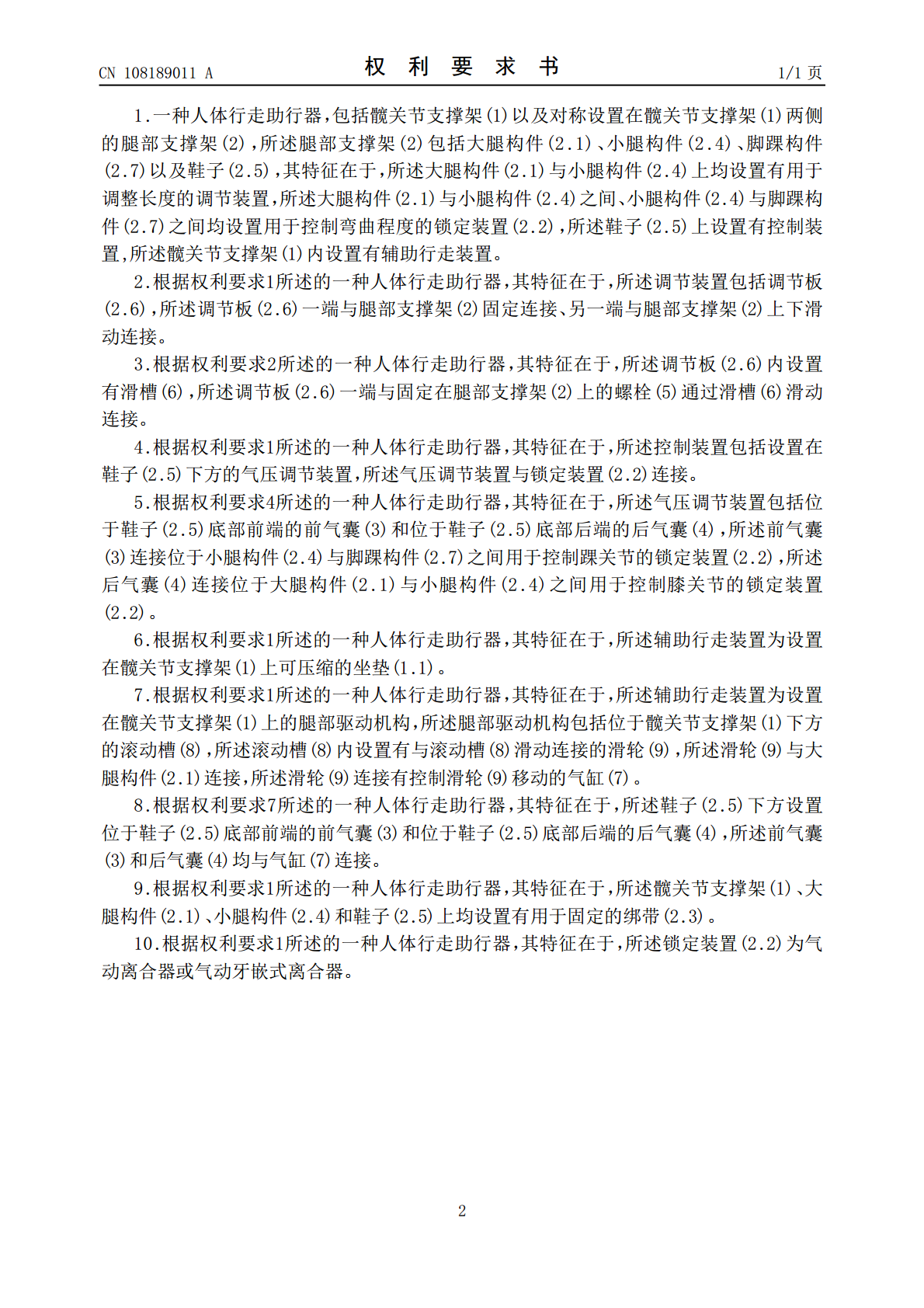
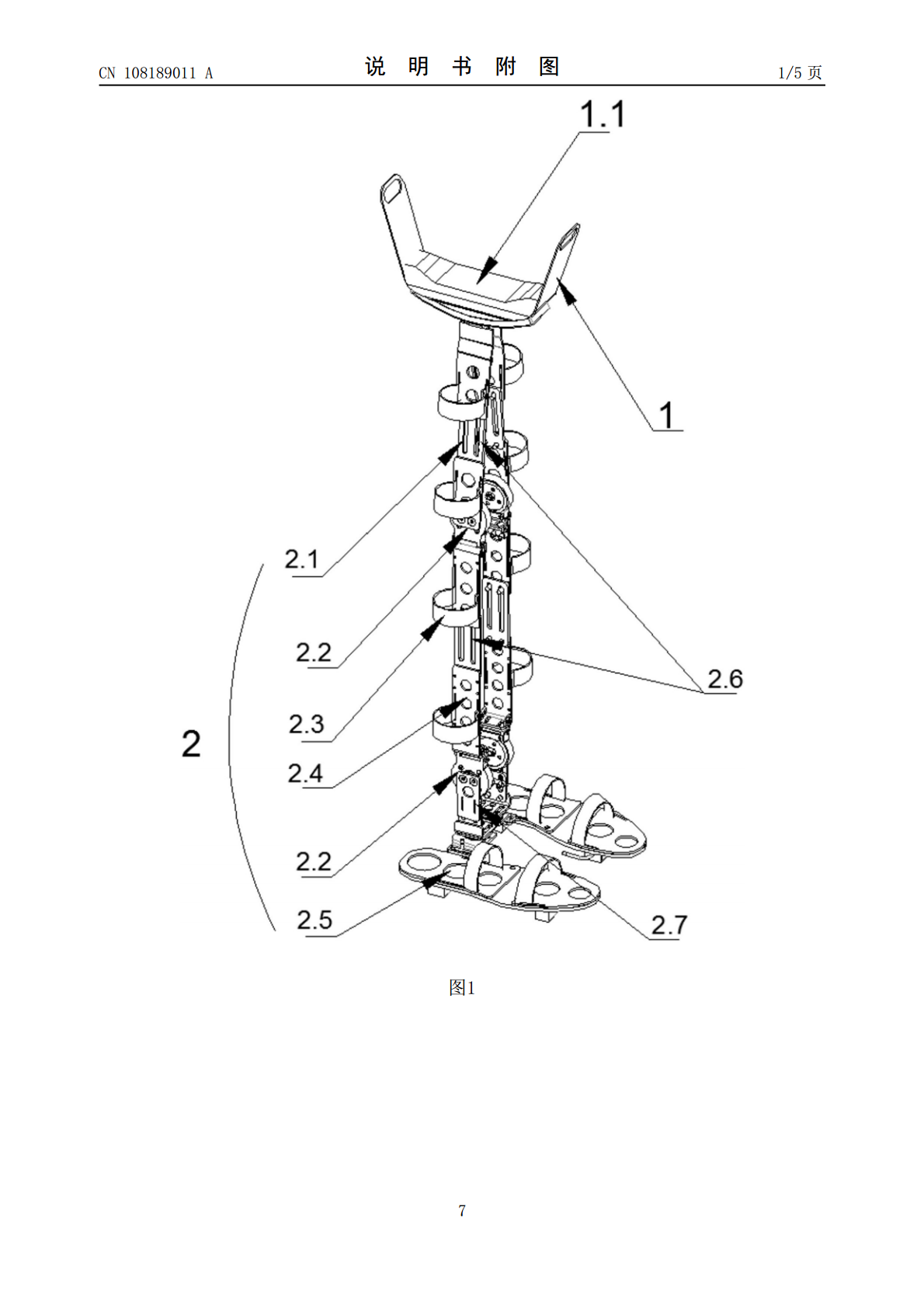
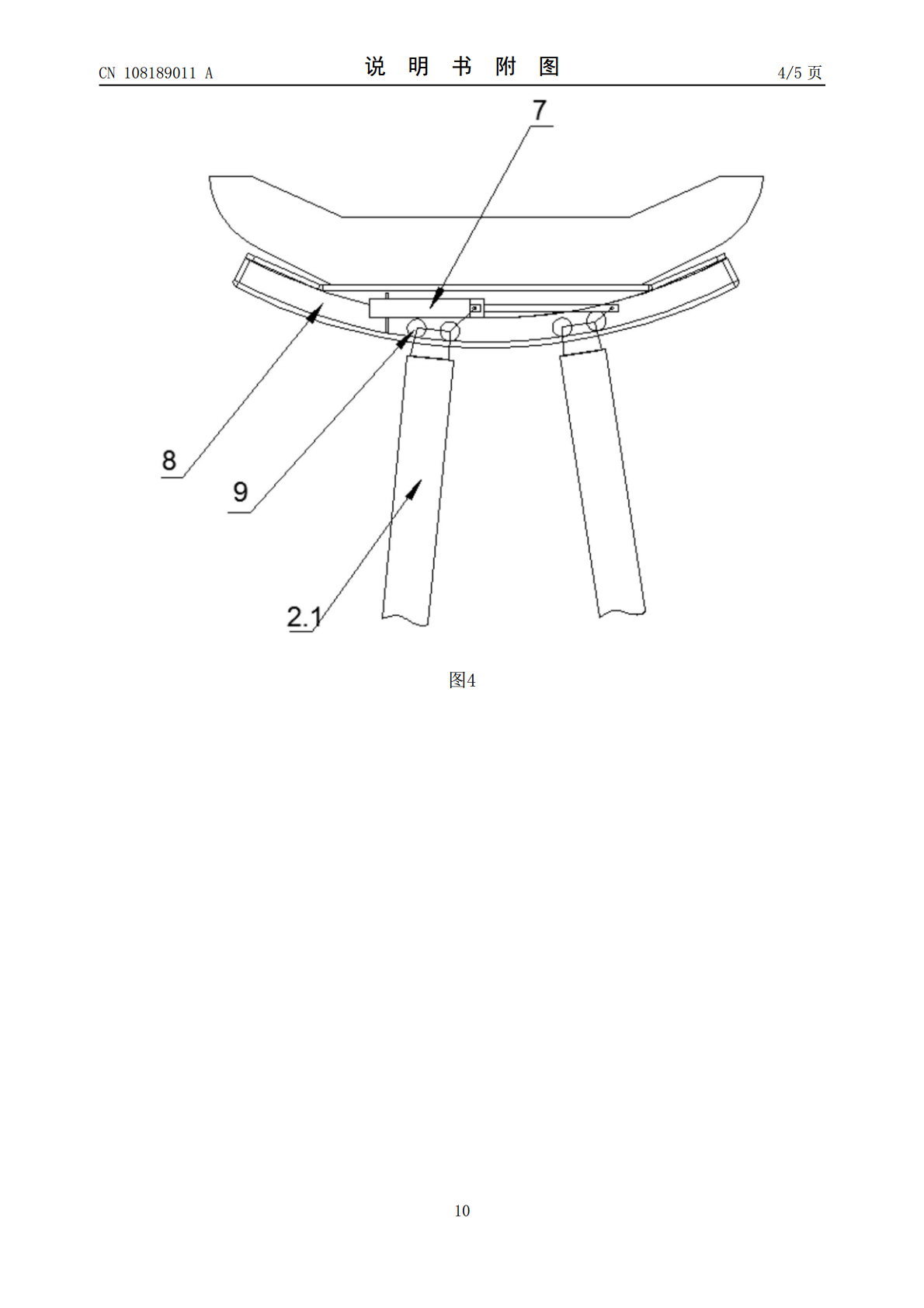
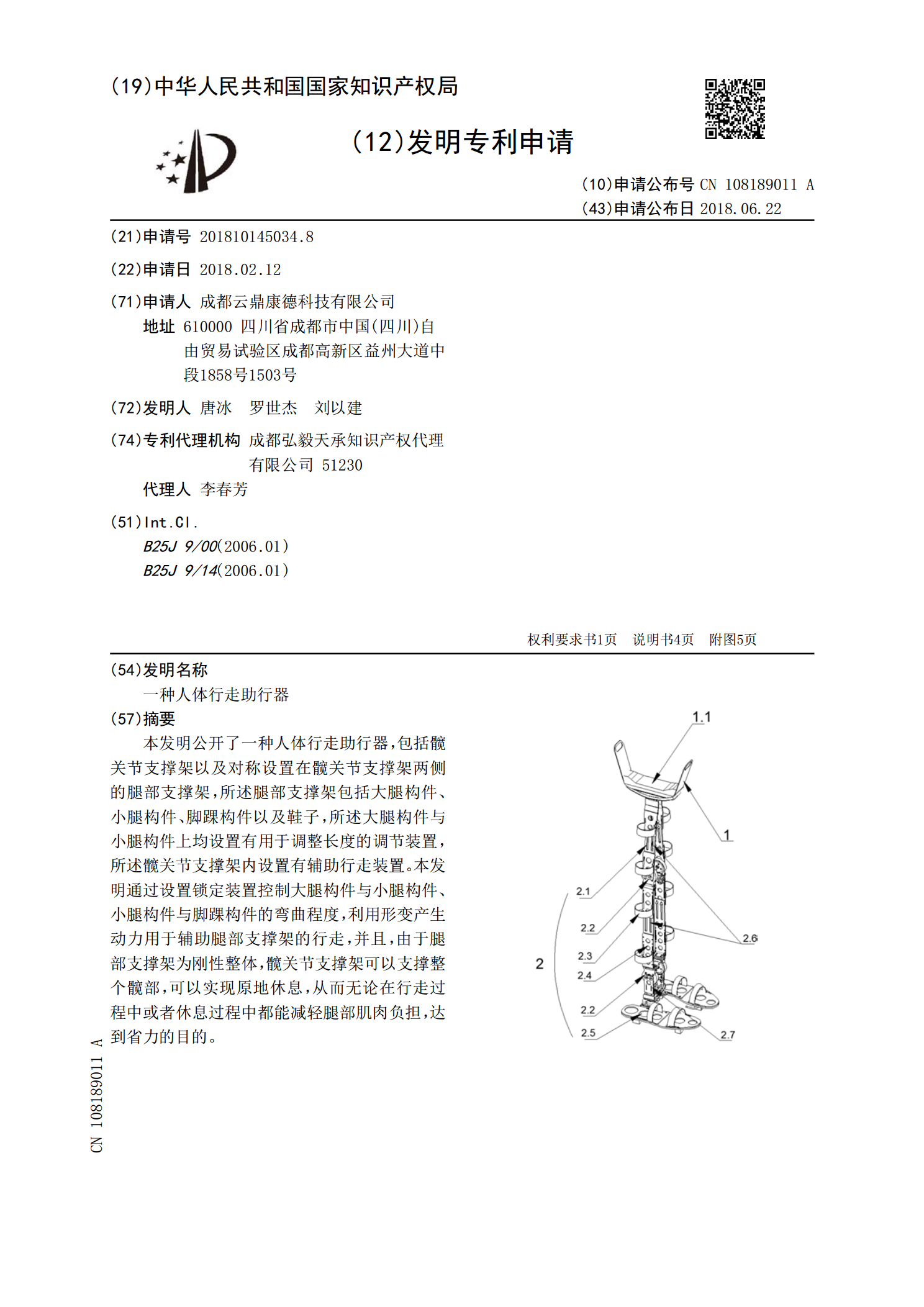
本发明公开了一种人体行走助行器,包括髋关节支撑架以及对称设置在髋关节支撑架两侧的腿部支撑架,所述腿部支撑架包括大腿构件、小腿构件、脚踝构件以及鞋子,所述大腿构件与小腿构件上均设置有用于调整长度的调节装置,所述髋关节支撑架内设置有辅助行走装置。本发明通过设置锁定装置控制大腿构件与小腿构件、小腿构件与脚踝构件的弯曲程度,利用形变产生动力用于辅助腿部支撑架的行走,并且,由于腿部支撑架为刚性整体,髋关节支撑架可以支撑整个髋部,可以实现原地休息,从而无论在行走过程中或者休息过程中都能减轻腿部肌肉负担,达到省力的目的
一种助行器的行走轮及助行器.pdf
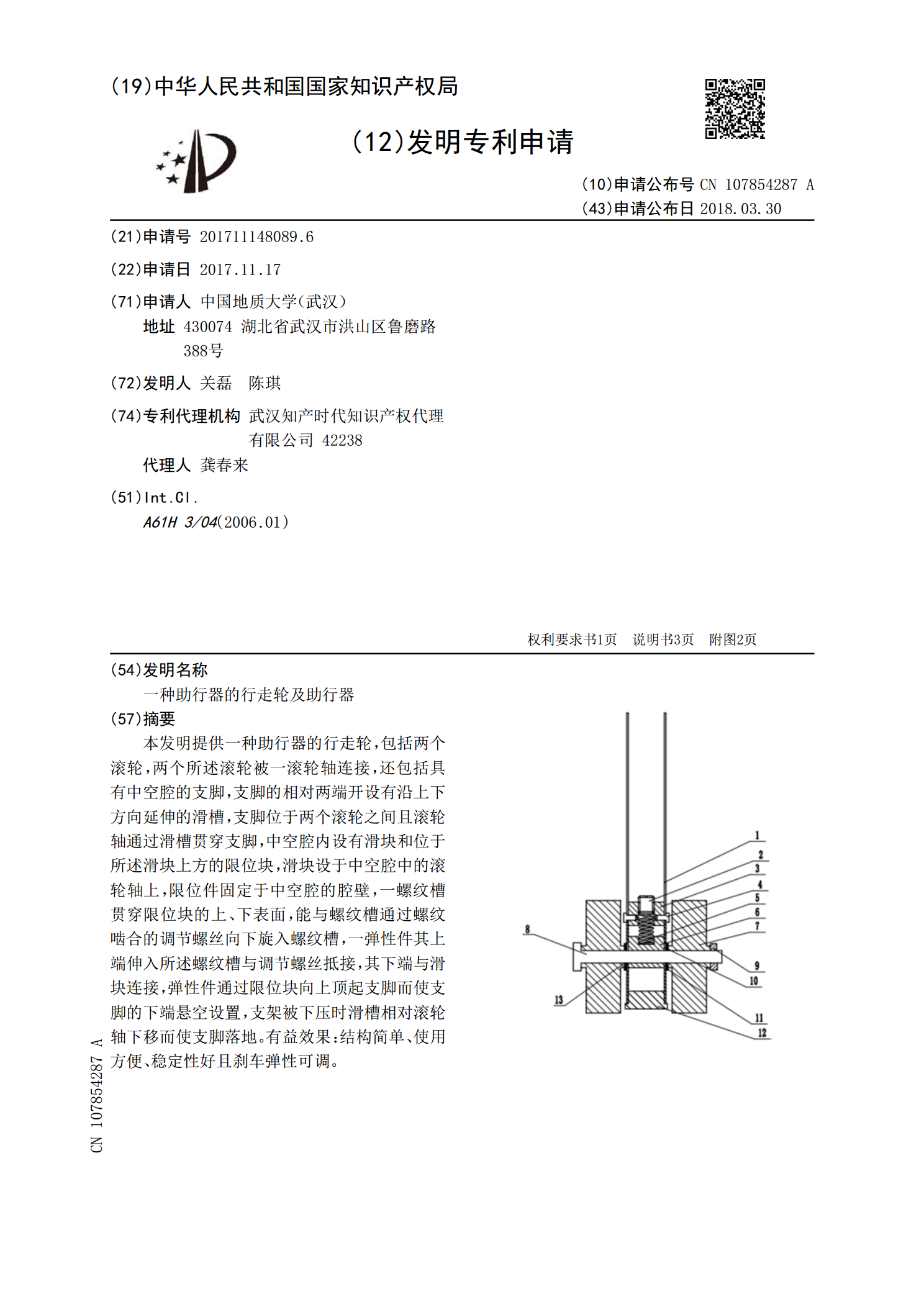
本发明提供一种助行器的行走轮,包括两个滚轮,两个所述滚轮被一滚轮轴连接,还包括具有中空腔的支脚,支脚的相对两端开设有沿上下方向延伸的滑槽,支脚位于两个滚轮之间且滚轮轴通过滑槽贯穿支脚,中空腔内设有滑块和位于所述滑块上方的限位块,滑块设于中空腔中的滚轮轴上,限位件固定于中空腔的腔壁,一螺纹槽贯穿限位块的上、下表面,能与螺纹槽通过螺纹啮合的调节螺丝向下旋入螺纹槽,一弹性件其上端伸入所述螺纹槽与调节螺丝抵接,其下端与滑块连接,弹性件通过限位块向上顶起支脚而使支脚的下端悬空设置,支架被下压时滑槽相对滚轮轴下移而使
带压入式行走轮的助行器.pdf
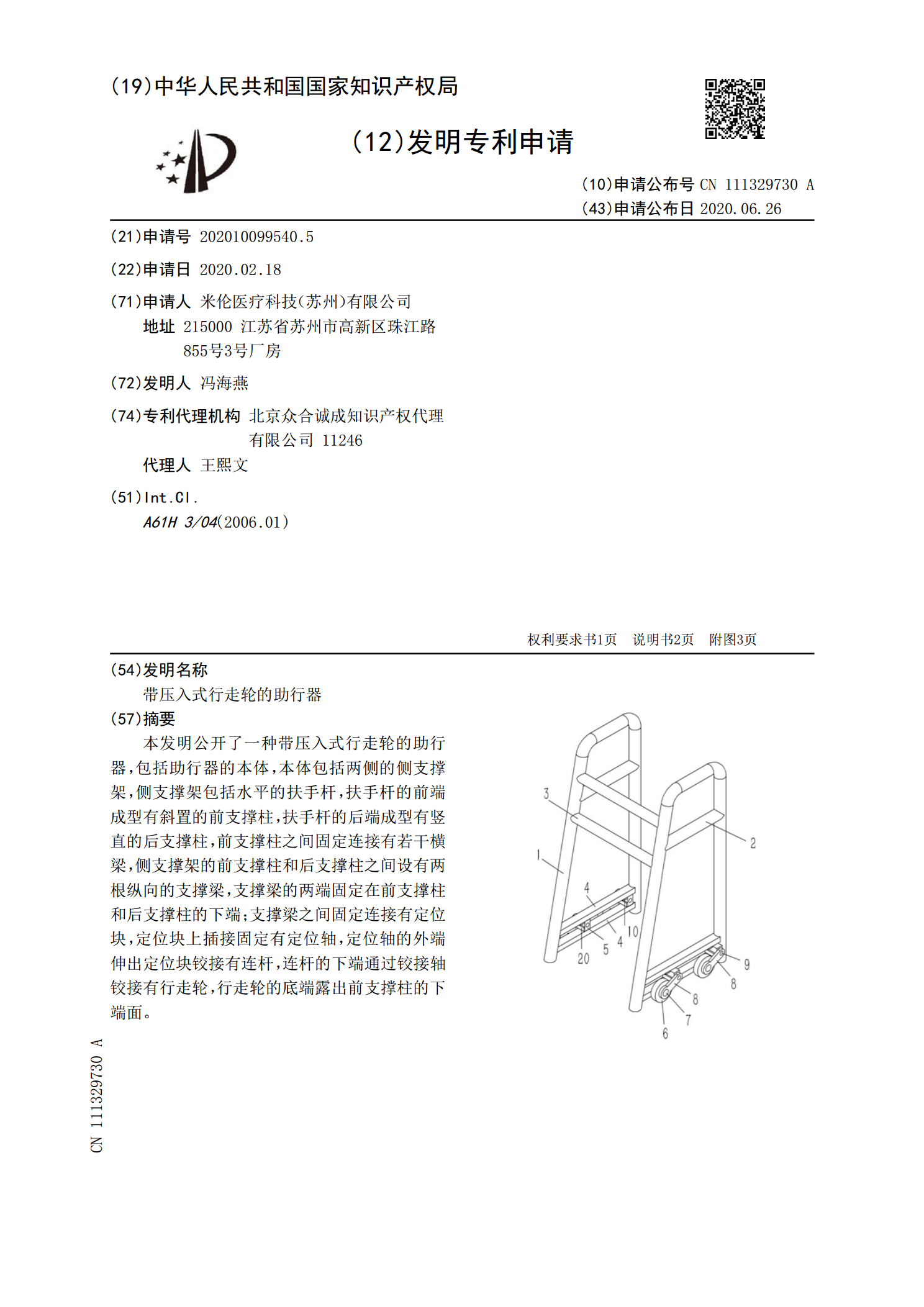
本发明公开了一种带压入式行走轮的助行器,包括助行器的本体,本体包括两侧的侧支撑架,侧支撑架包括水平的扶手杆,扶手杆的前端成型有斜置的前支撑柱,扶手杆的后端成型有竖直的后支撑柱,前支撑柱之间固定连接有若干横梁,侧支撑架的前支撑柱和后支撑柱之间设有两根纵向的支撑梁,支撑梁的两端固定在前支撑柱和后支撑柱的下端;支撑梁之间固定连接有定位块,定位块上插接固定有定位轴,定位轴的外端伸出定位块铰接有连杆,连杆的下端通过铰接轴铰接有行走轮,行走轮的底端露出前支撑柱的下端面。
一种助行器.pdf
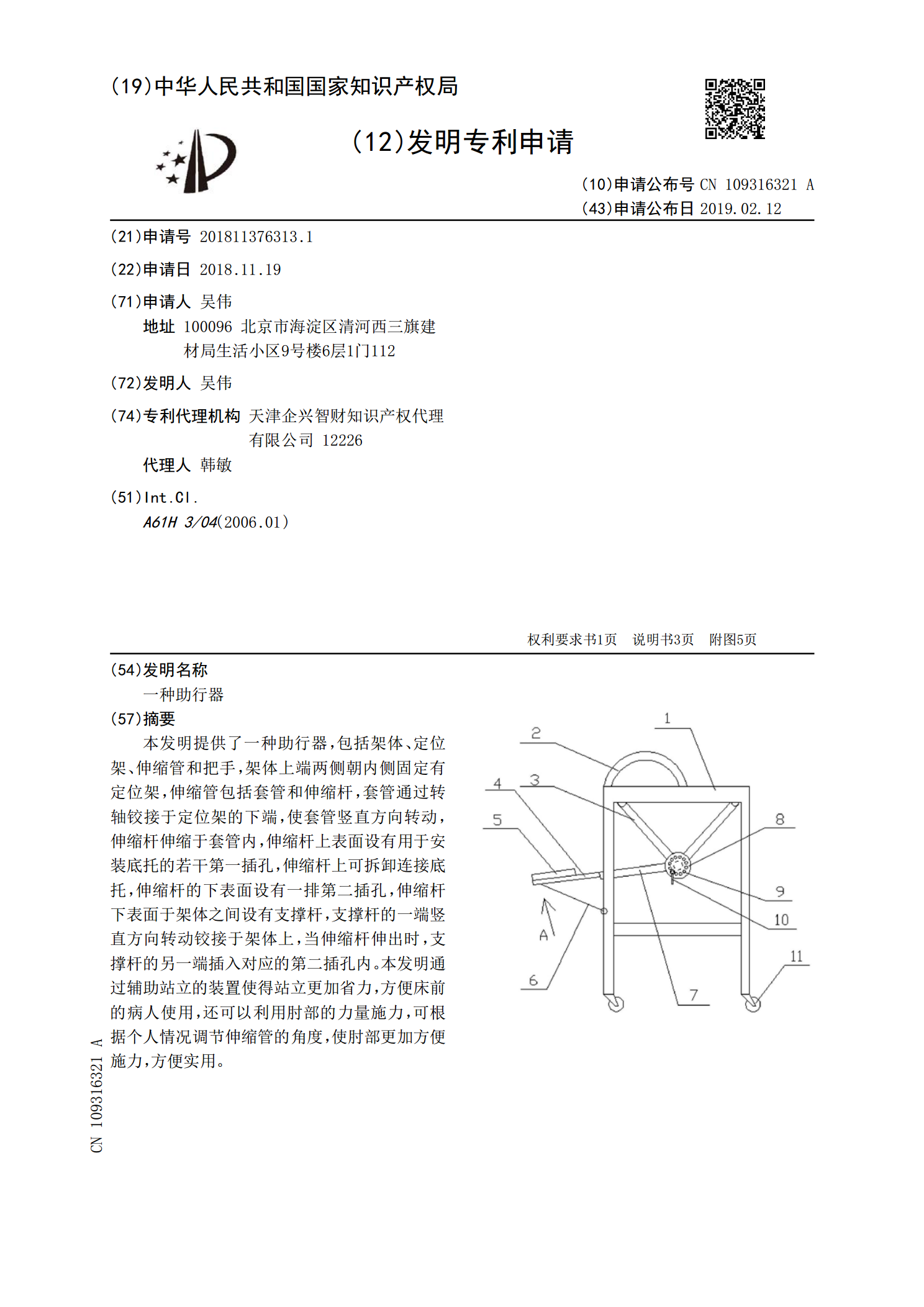
本发明提供了一种助行器,包括架体、定位架、伸缩管和把手,架体上端两侧朝内侧固定有定位架,伸缩管包括套管和伸缩杆,套管通过转轴铰接于定位架的下端,使套管竖直方向转动,伸缩杆伸缩于套管内,伸缩杆上表面设有用于安装底托的若干第一插孔,伸缩杆上可拆卸连接底托,伸缩杆的下表面设有一排第二插孔,伸缩杆下表面于架体之间设有支撑杆,支撑杆的一端竖直方向转动铰接于架体上,当伸缩杆伸出时,支撑杆的另一端插入对应的第二插孔内。本发明通过辅助站立的装置使得站立更加省力,方便床前的病人使用,还可以利用肘部的力量施力,可根据个人情况

一种助行器.pdf
本发明公开了一种助行器,包括:左支撑组件,其包括沿前后方向延伸的左连接杆、铰接于所述左连接杆上的左支撑杆、设置于所述左连接杆前端的第一前滑轮、设置于所述左连接杆后端的第一后滑轮;右支撑组件,其包括沿前后方向延伸的右连接杆、铰接于所述右连接杆上的右支撑杆、设置于所述右连接杆前端的第二前滑轮、设置于所述右连接杆后端的第二后滑轮,所述右支撑杆的旋转轴线沿左右方向延伸;折叠件,连接于所述左连接杆与所述右连接杆之间,本发明可灵活地对左支撑杆的倾斜角度或调节搀扶着力点的高度进行调节,使用更加灵活方便,并且在不需要使用