
一种结冰风洞可变初始攻角的翼型振荡机构及工作方法.pdf

美丽****ka


1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种结冰风洞可变初始攻角的翼型振荡机构及工作方法.pdf
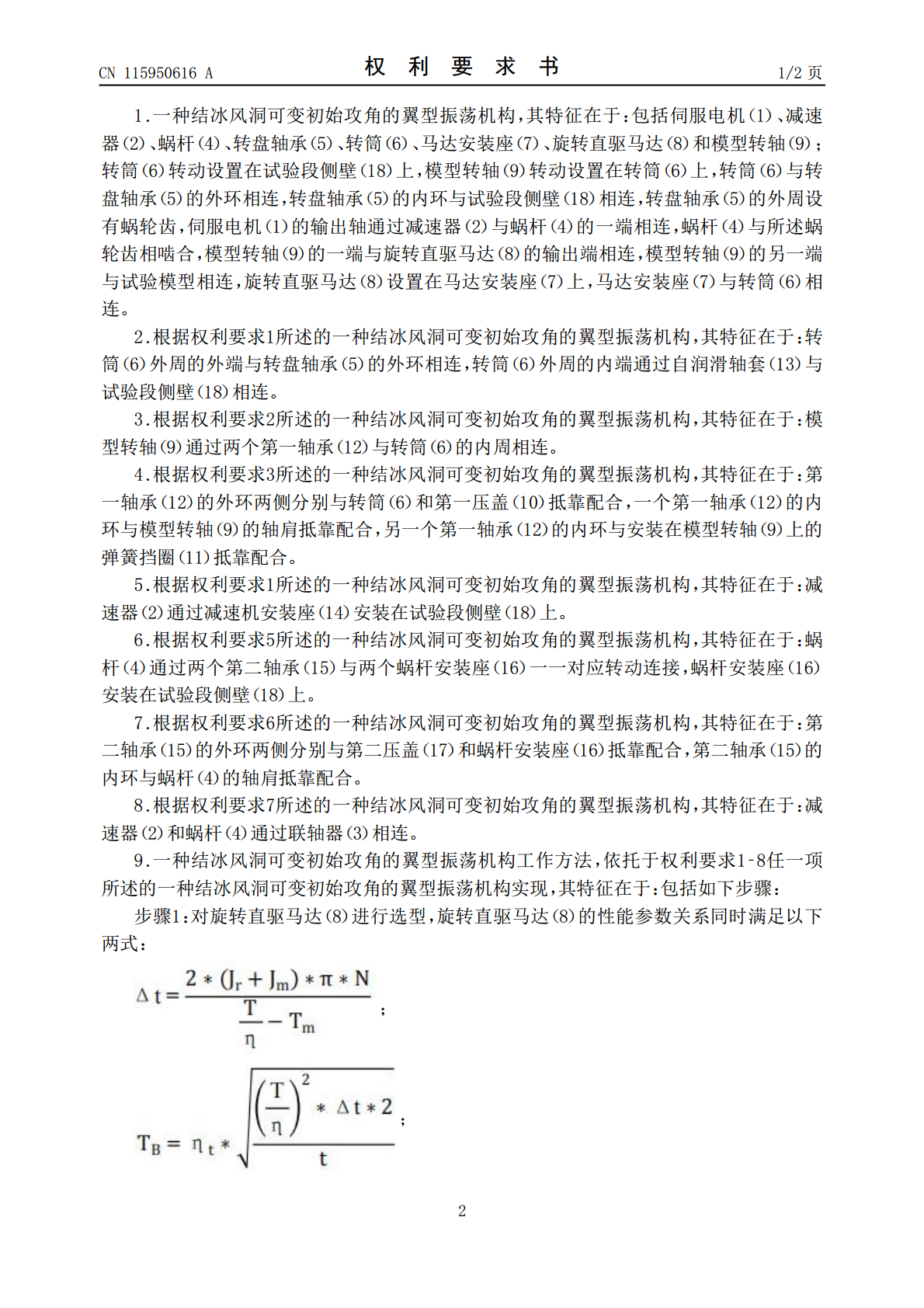
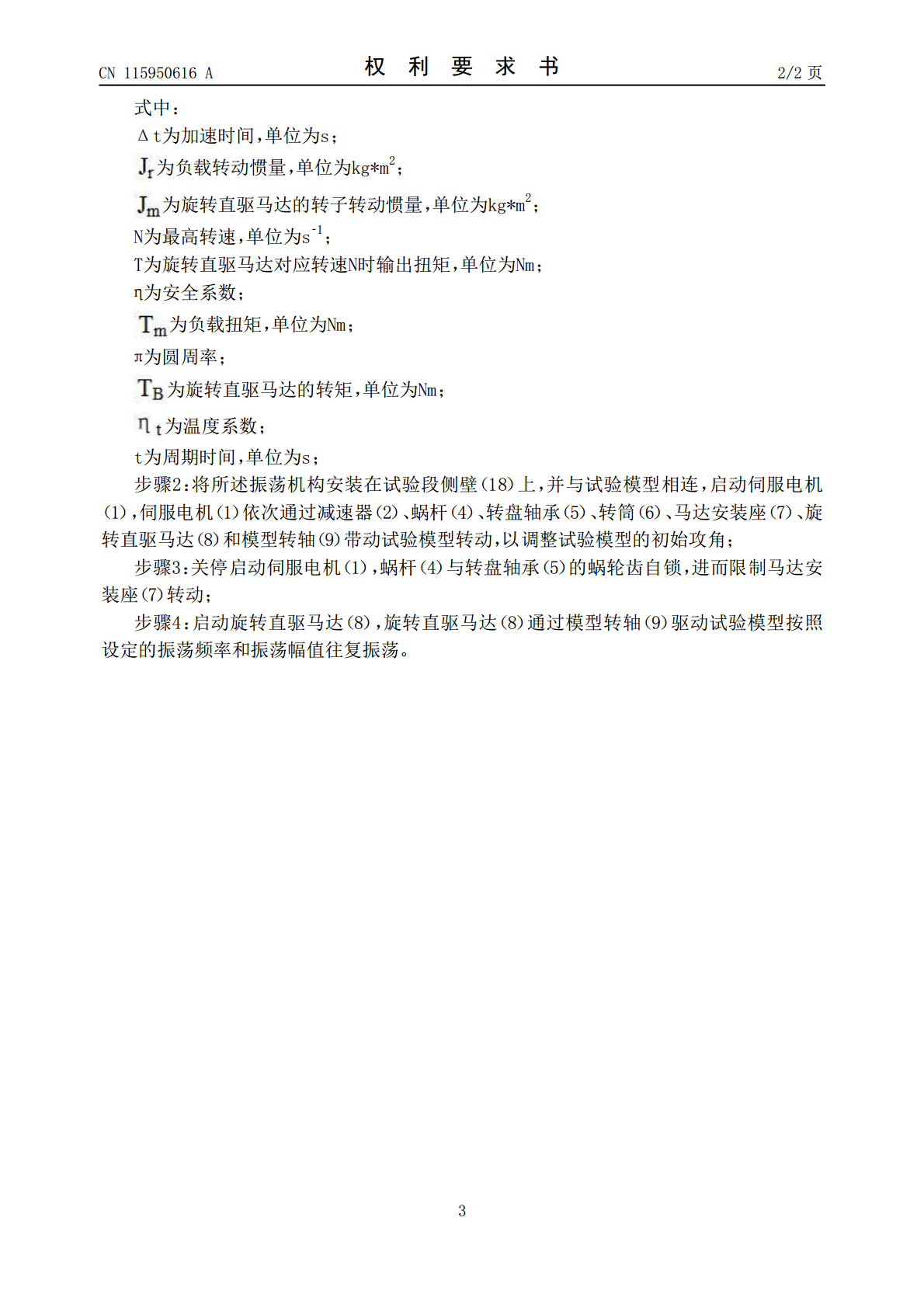
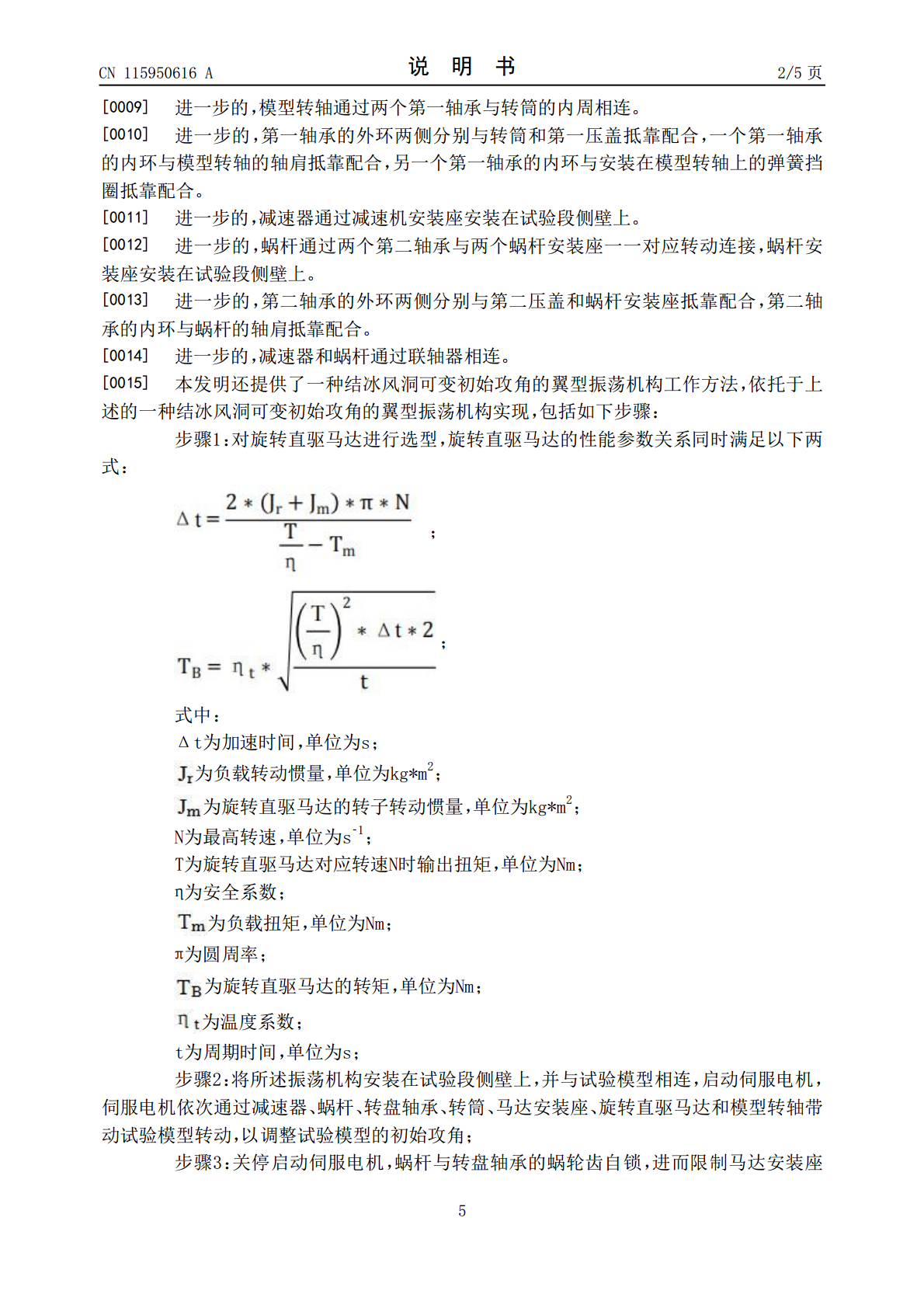
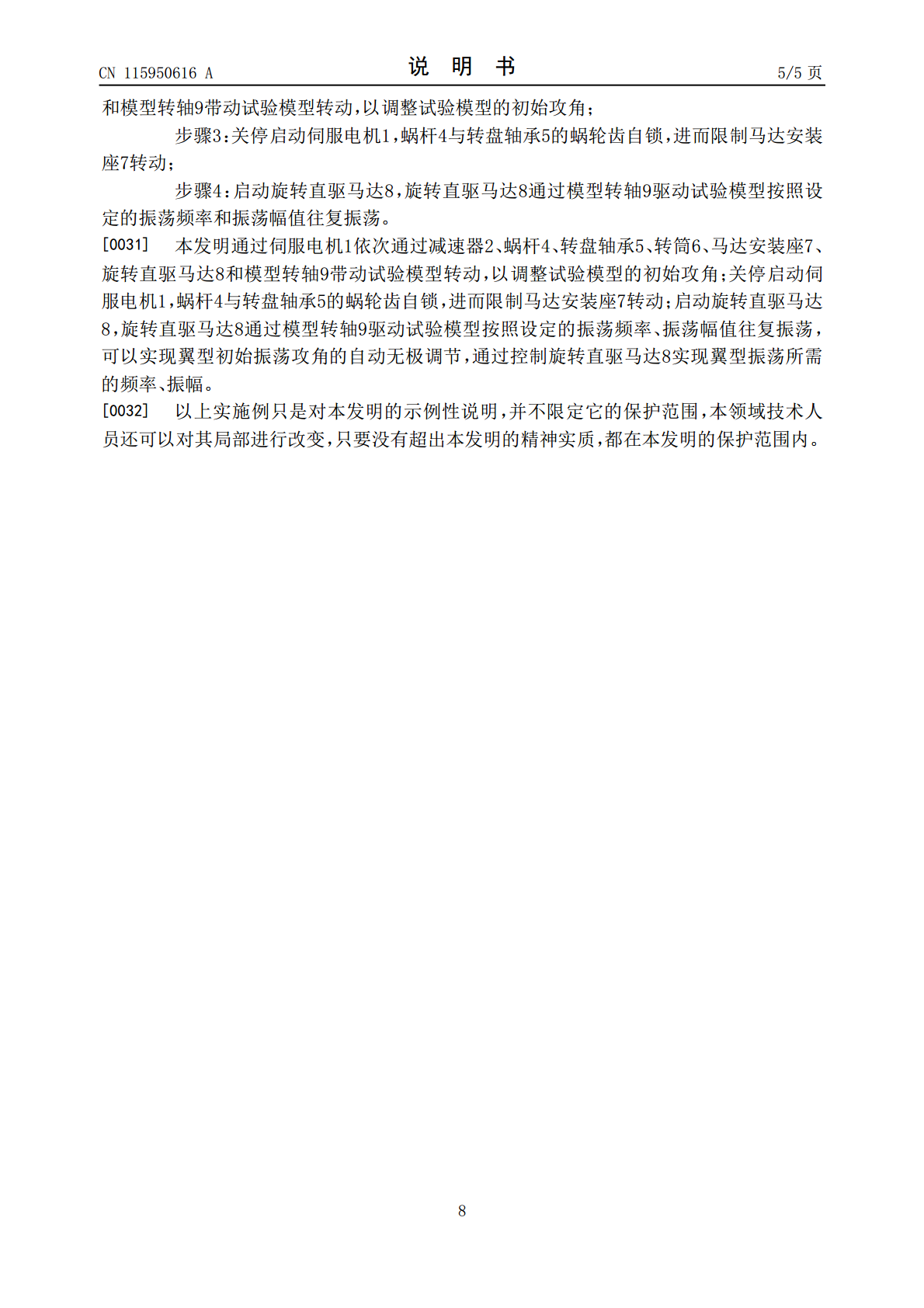
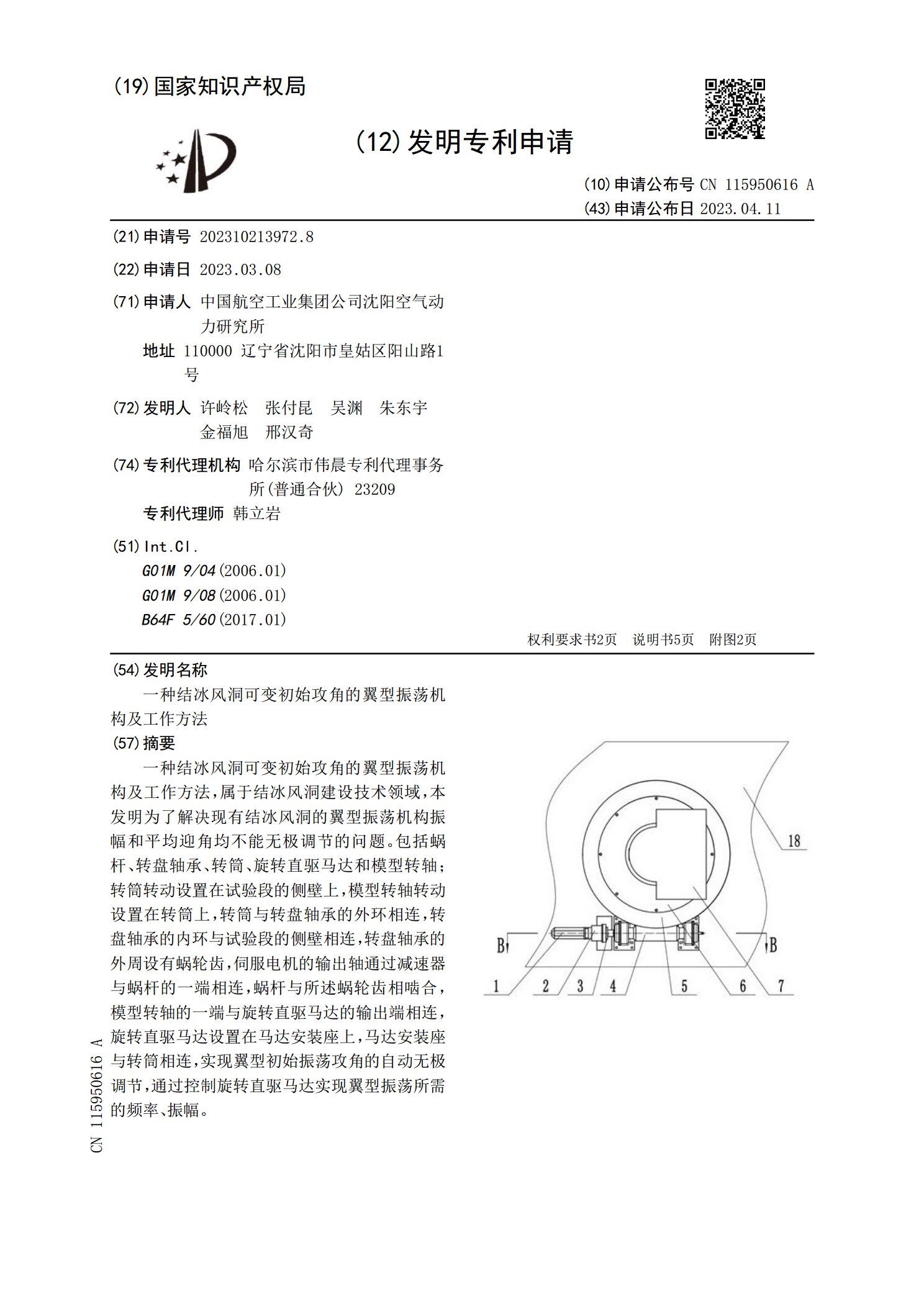
一种结冰风洞可变初始攻角的翼型振荡机构及工作方法,属于结冰风洞建设技术领域,本发明为了解决现有结冰风洞的翼型振荡机构振幅和平均迎角均不能无极调节的问题。包括蜗杆、转盘轴承、转筒、旋转直驱马达和模型转轴;转筒转动设置在试验段的侧壁上,模型转轴转动设置在转筒上,转筒与转盘轴承的外环相连,转盘轴承的内环与试验段的侧壁相连,转盘轴承的外周设有蜗轮齿,伺服电机的输出轴通过减速器与蜗杆的一端相连,蜗杆与所述蜗轮齿相啮合,模型转轴的一端与旋转直驱马达的输出端相连,旋转直驱马达设置在马达安装座上,马达安装座与转筒相连,实
一种高速风洞攻角机构.pdf
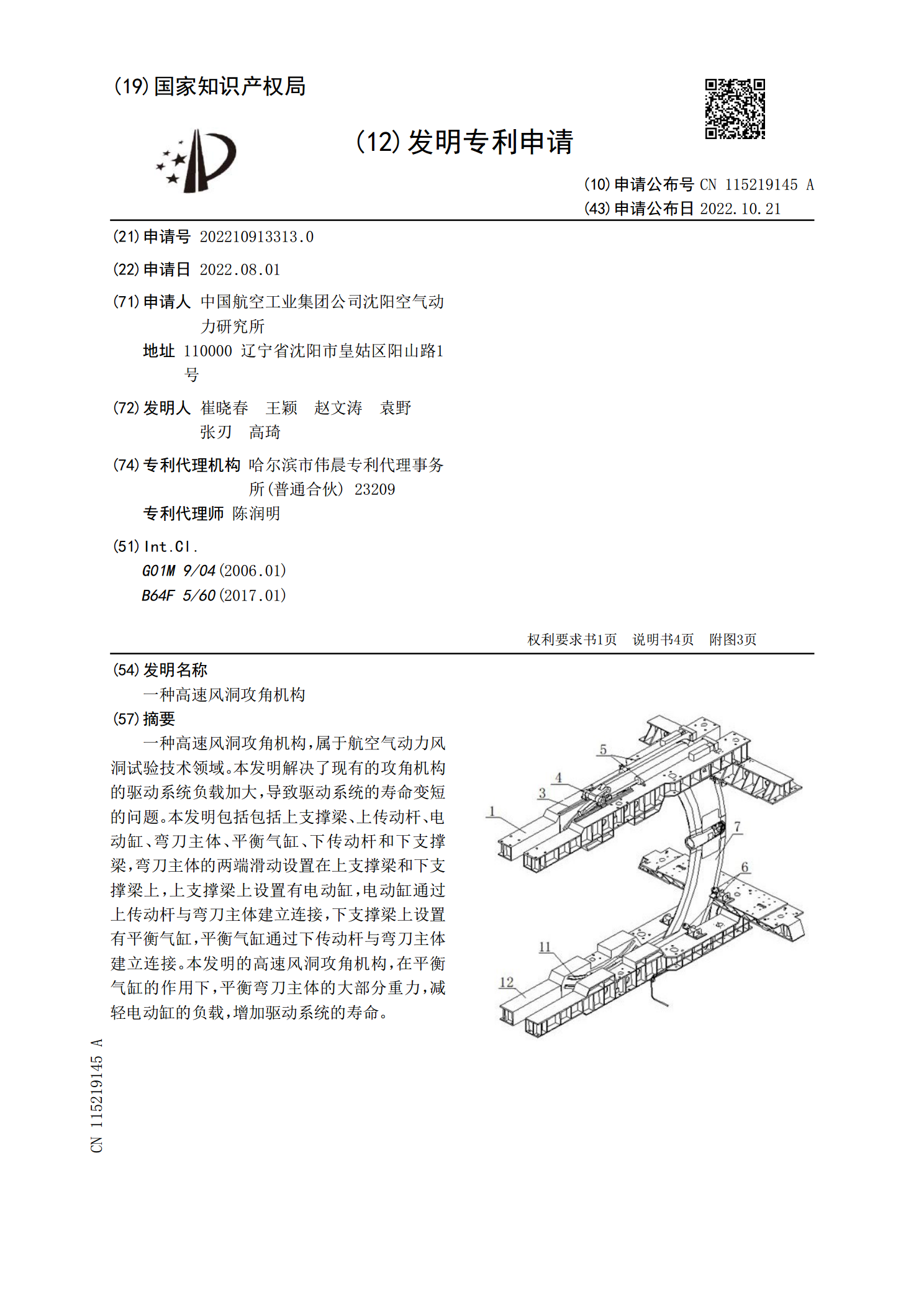
一种高速风洞攻角机构,属于航空气动力风洞试验技术领域。本发明解决了现有的攻角机构的驱动系统负载加大,导致驱动系统的寿命变短的问题。本发明包括包括上支撑梁、上传动杆、电动缸、弯刀主体、平衡气缸、下传动杆和下支撑梁,弯刀主体的两端滑动设置在上支撑梁和下支撑梁上,上支撑梁上设置有电动缸,电动缸通过上传动杆与弯刀主体建立连接,下支撑梁上设置有平衡气缸,平衡气缸通过下传动杆与弯刀主体建立连接。本发明的高速风洞攻角机构,在平衡气缸的作用下,平衡弯刀主体的大部分重力,减轻电动缸的负载,增加驱动系统的寿命。
一种翼型横摆振荡风洞试验装置.pdf
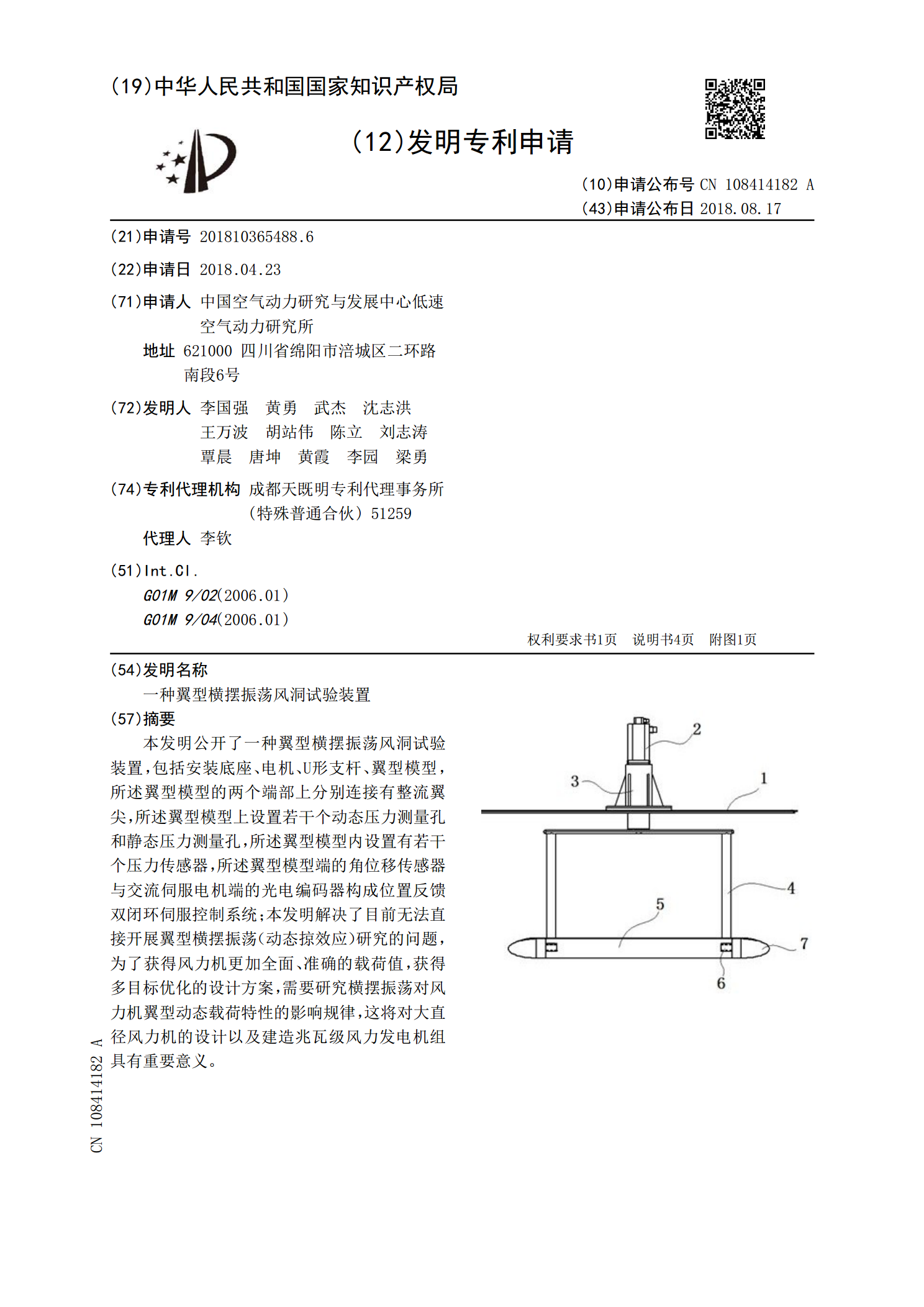
本发明公开了一种翼型横摆振荡风洞试验装置,包括安装底座、电机、U形支杆、翼型模型,所述翼型模型的两个端部上分别连接有整流翼尖,所述翼型模型上设置若干个动态压力测量孔和静态压力测量孔,所述翼型模型内设置有若干个压力传感器,所述翼型模型端的角位移传感器与交流伺服电机端的光电编码器构成位置反馈双闭环伺服控制系统;本发明解决了目前无法直接开展翼型横摆振荡(动态掠效应)研究的问题,为了获得风力机更加全面、准确的载荷值,获得多目标优化的设计方案,需要研究横摆振荡对风力机翼型动态载荷特性的影响规律,这将对大直径风力机的

减缩频率和平均攻角对俯仰振荡翼型影响分析.docx
减缩频率和平均攻角对俯仰振荡翼型影响分析减缩频率和平均攻角对俯仰振荡翼型影响分析随着科技的快速发展,航空制造业不断推陈出新,而翼型作为一种重要的部件,在飞行中起着至关重要的作用。在翼型振荡领域,减缩频率和平均攻角是两个非常重要的因素,它们对翼型的流动特性和气动力学性能有着重要的影响。本文将从减缩频率和平均攻角两个方面,对俯仰振荡翼型的影响进行分析。一、减缩频率对俯仰振荡翼型的影响减缩频率是翼型振荡过程中翼面积变化的频率,它对翼型的气动特性和流动特性有着重要的影响。对于振荡幅度和频率相同的翼型,其减缩频率越
一种风洞模型连续变攻角变侧滑角机构.pdf
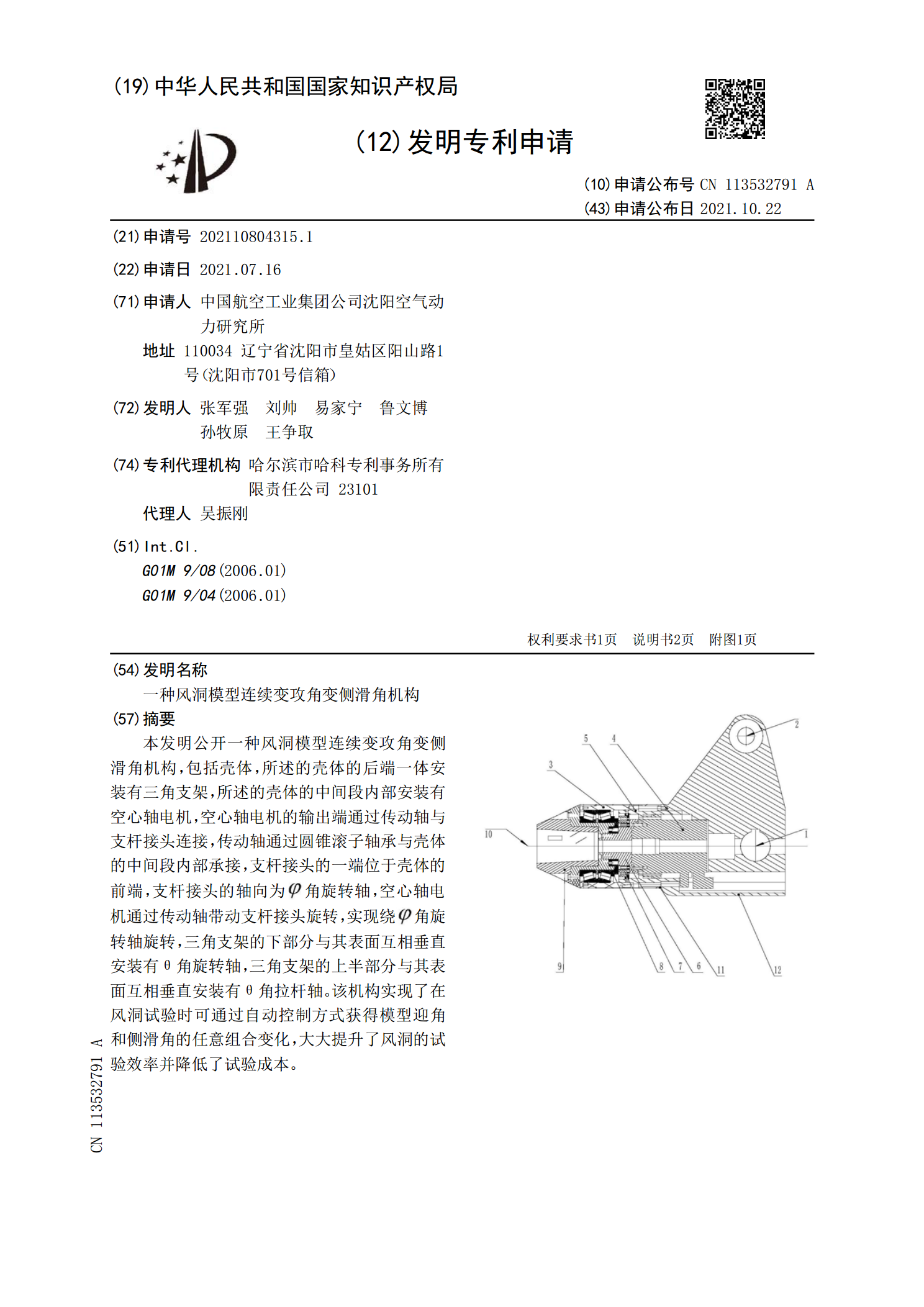
本发明公开一种风洞模型连续变攻角变侧滑角机构,包括壳体,所述的壳体的后端一体安装有三角支架,所述的壳体的中间段内部安装有空心轴电机,空心轴电机的输出端通过传动轴与支杆接头连接,传动轴通过圆锥滚子轴承与壳体的中间段内部承接,支杆接头的一端位于壳体的前端,支杆接头的轴向为