
一种桥梁裂纹检测装置.pdf

一只****懿呀


1/9

2/9
3/9

4/9

5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种桥梁裂纹检测装置.pdf
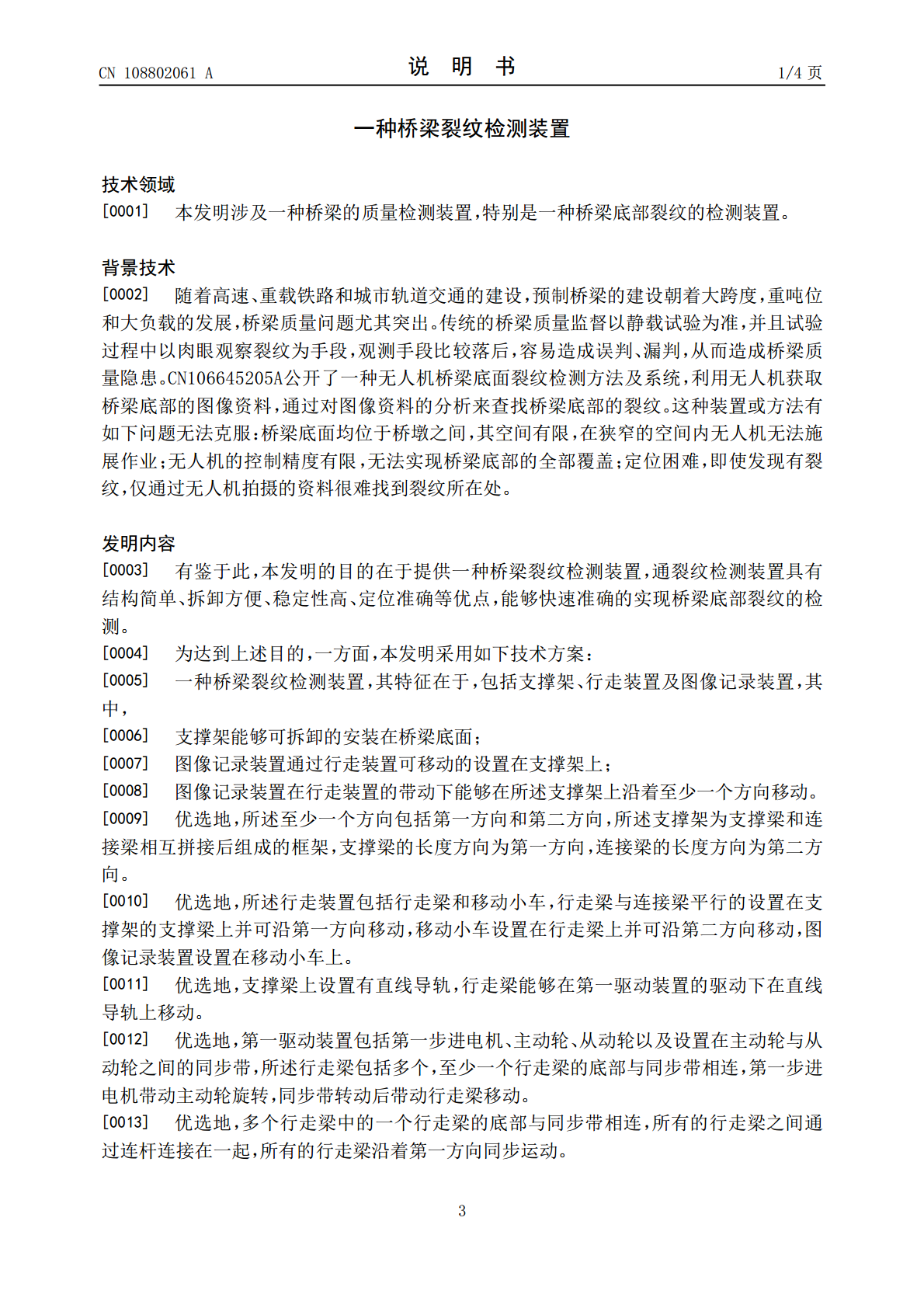
本发明公开了一种桥梁裂纹检测装置,其包括支撑架、行走装置及图像记录装置,支撑架能够可拆卸的安装在桥梁底面;图像记录装置通过行走装置可移动的设置在支撑架上;图像记录装置在行走装置的带动下能够在所述支撑架上沿着至少一个方向移动。图像记录装置在移动过程中对桥梁底面进行图像记录,检测人员根据图像记录来排查桥梁底部裂纹情况。本装置具有结构简单、拆卸方便、稳定性高、定位准确等优点,能够快速准确的实现桥梁底部裂纹的检测。

一种桥梁钢结构裂纹检测装置.pdf
本发明公开了一种桥梁钢结构裂纹检测装置,涉及检测技术领域,包括底箱,所述底箱的顶部两端均固定连接有固定侧板,两个固定侧板之间设有传动输送组件、检测组件以及观察组件,两个固定侧板之间固定连接内固定座;所述传动输送组件包括两个传动带,两个传动带的内侧均转动连接有传动轮,传动轮同轴固定连接传动轴,两个传动带的相邻侧均固定连接有多个伸缩杆,伸缩杆的伸缩端固定连接夹持座;本发明通过设置传动输送组件能够将钢结构输送至底箱内,将钢结构浸泡在检测液内然后再输送离开,通过设置检测组件能够对浸泡过检测液之后的钢结构进行检测,
一种裂纹检测装置和裂纹检测方法.pdf
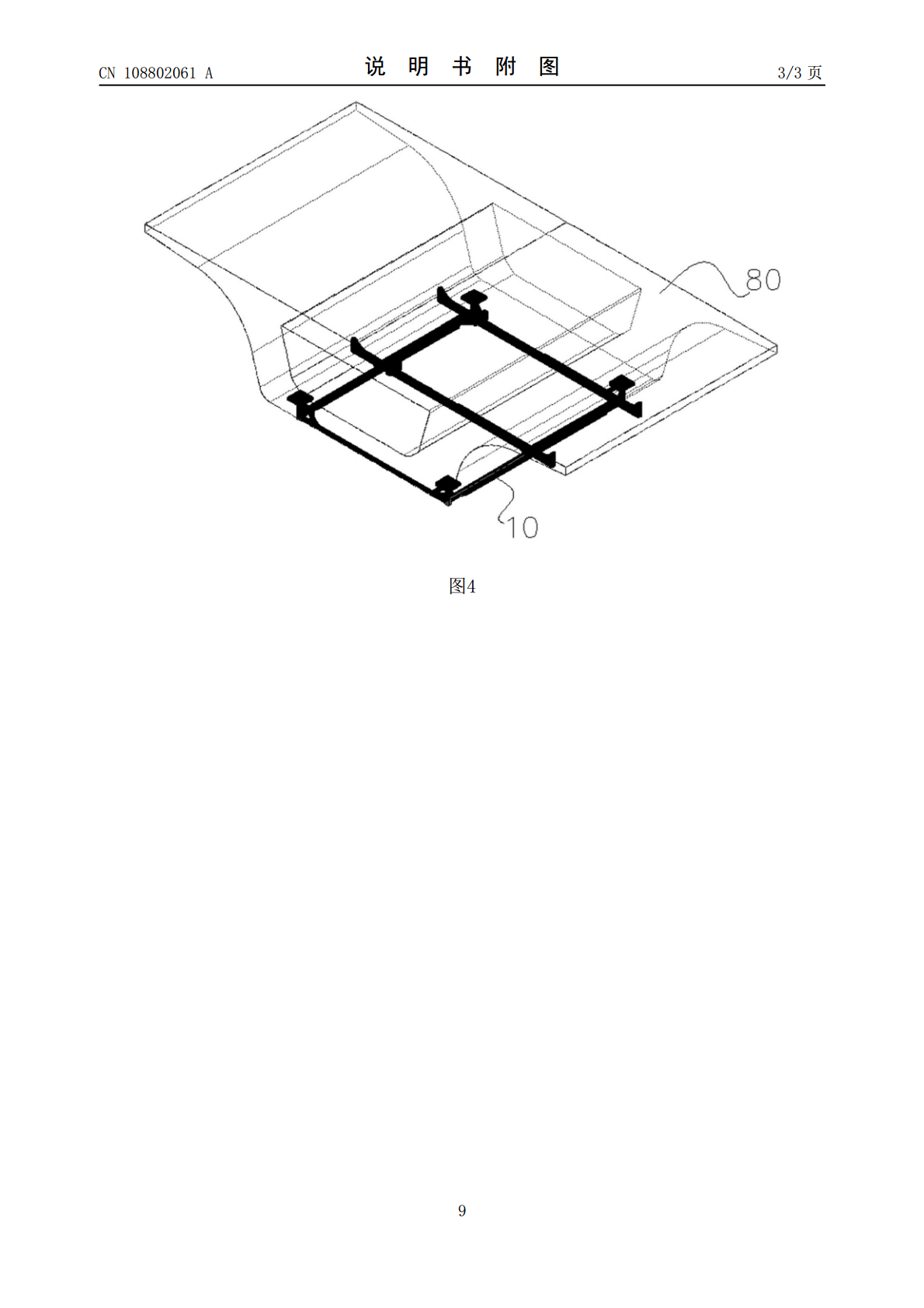
本发明属于无损探伤技术领域,尤其涉及一种裂纹检测装置和裂纹检测方法。裂纹检测装置包括:卡盘定位结构,其用于固定被测管材并带动被测管材同步自转;裂纹检测结构,其包括固定架和安装在固定架上的自适应伸缩杆,所述自适应伸缩杆上设有与被测管材外周面外切接触的滚轮,所述自适应伸缩杆上通过探头定位机构安装有裂纹检测探头组件。管材裂纹检测方法,包括以下步骤:确定被测管材的固定及运动方式;定位裂纹检测探头位置;被测管材裂纹检测过程。本发明用以检测被测管材是否存在裂纹或其他损伤等,属于无损探伤,能够有效检出被测管材中存在的裂
一种管道裂纹检测装置.pdf
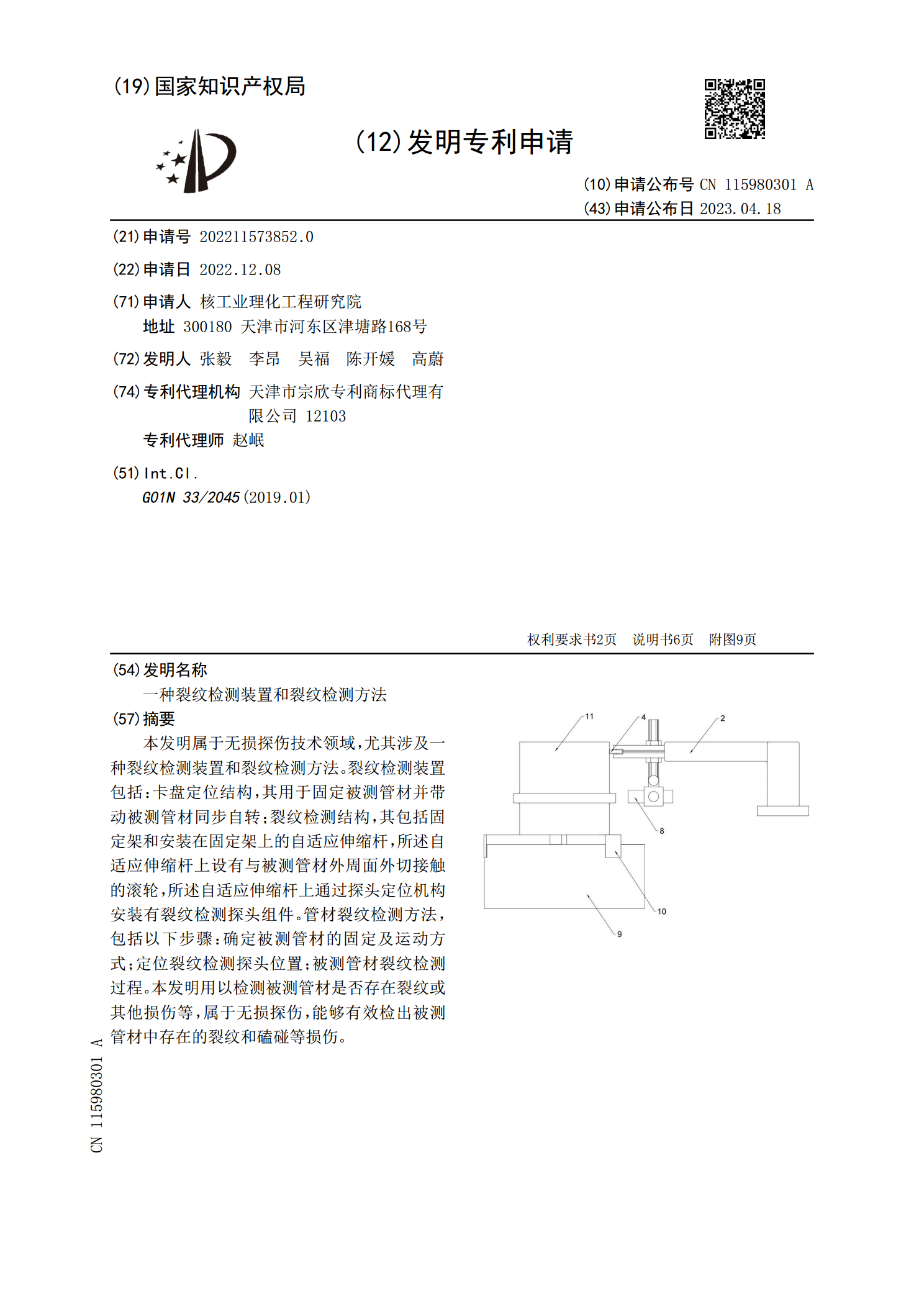
本发明涉及一种管道裂纹检测装置,包括后端盖、检测组件、电源、信号处理组件、壳体、限位杆、弹簧、行走轮、连杆、铰链、前端盖、拉环组成。检测组件包括磁轭、瓦片、线圈组、环体、圆柱型永久磁体。磁轭与圆柱型永久磁体两端相连,瓦片中有与线圈大小形状相仿的固定腔,用于固定线圈从而减少抖动对检测效果的影响。线圈组中线圈按圆周排列,两两互为差动且每三个互成三角形,安装于环体上。信号处理组件与线圈组相连,用于处理线圈组的检测信号,运用压缩感知技术对处理后的检测信号再进行处理后存储。限位杆用以保障线圈组始终在提离效应对信号影

一种鸭蛋裂纹筛选检测装置.pdf
本发明公开了一种鸭蛋裂纹筛选检测装置,包括传送箱,所述传送箱的内部横向设置有传送带,所述传送箱的外侧壁上设有转动机构,所述转动机构包括两个转动辊,所述传送箱的顶部安装有清洗机构;所述传送箱的顶部位于清洗机构的侧面还安装有吹气机构,所述传送箱的顶部位于吹气机构的侧面安装有检测罩。该鸭蛋裂纹筛选检测装置,设置有传送带、转动机构和清洗机构,利用传送带带动鸭蛋的横移,利用转动机构中的转动辊带动鸭蛋的自转,使得鸭蛋在移动时发生自转,进而在经过清洗机构的时候,被驱动机构带动转动的套筒管带动安装板和柔性清洗件对鸭蛋进行