
滑动抗倾斜装置及抗倾斜方法.pdf

悠柔****找我


1/9

2/9

3/9

4/9

5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

滑动抗倾斜装置及抗倾斜方法.pdf
本发明公开了一种滑动抗倾斜装置,包括四个滑轮组件和两个滑道,两个滑道分别安装于集成平台支撑架远离挂爪的两个支撑柱上,四个滑轮组件分别设于两侧滑道的上、下位置,每个滑轮组件均包括滑轮和固定架,固定架固定于集成平台支撑架远离挂爪的一侧,滑轮通过可调螺杆与固定架连接,滑轮卡接于所述滑道内。本发明通过调节螺纹拉杆,使集成平台支承架提升时其两侧的四个可调的滑轮组件通过滑轮与滑道的内壁挤压,组成下支承架提升回落过程中的滑动抗倾斜系统,可以更好地将下支承架与承力件贴合,提高下支承架提升过程中的稳定、安全性、可靠,从而从

一种抗桥梁倾斜装置及施工方法.pdf
本申请涉及一种抗桥梁倾斜装置,其包括安装框体、用于支撑安装框体的支撑底板,以及铰接在安装框体上的支撑杆,所述支撑底板上设置有第一固定件,所述第一固定件用于将支撑底板固定在桥墩上;所述安装框体包括第一夹框、第二夹框和第二固定件,所述第一夹框与第二夹框用于装夹在桥墩上,所述第二固定件用于固定第一夹框和第二夹框;所述支撑杆至少设置两根,且所述支撑杆上远离安装框体的一端铰接有安装板,所述安装板上设置有第三固定件,所述第三固定件用于将安装板固定在桥板上。本申请具有桥梁抗倾斜能力高的效果。

倾斜结构及滑动装置.pdf
一种倾斜结构,包括:基底台;摇动框,相对于基底台可摇动地安装;升降部件,安装在摇动框上,通过转动而相对于摇动框进行升降动作;凸轮结构,具有在形成于基底台上的开口的内壁上形成的凸轮部、及在升降部件上向外侧突出形成并与凸轮部卡合的突起部,随着升降部件的转动而施力以使升降部件相对于基底台倾斜。
一种桥梁大型钢构件抗倾斜装置及方法.pdf
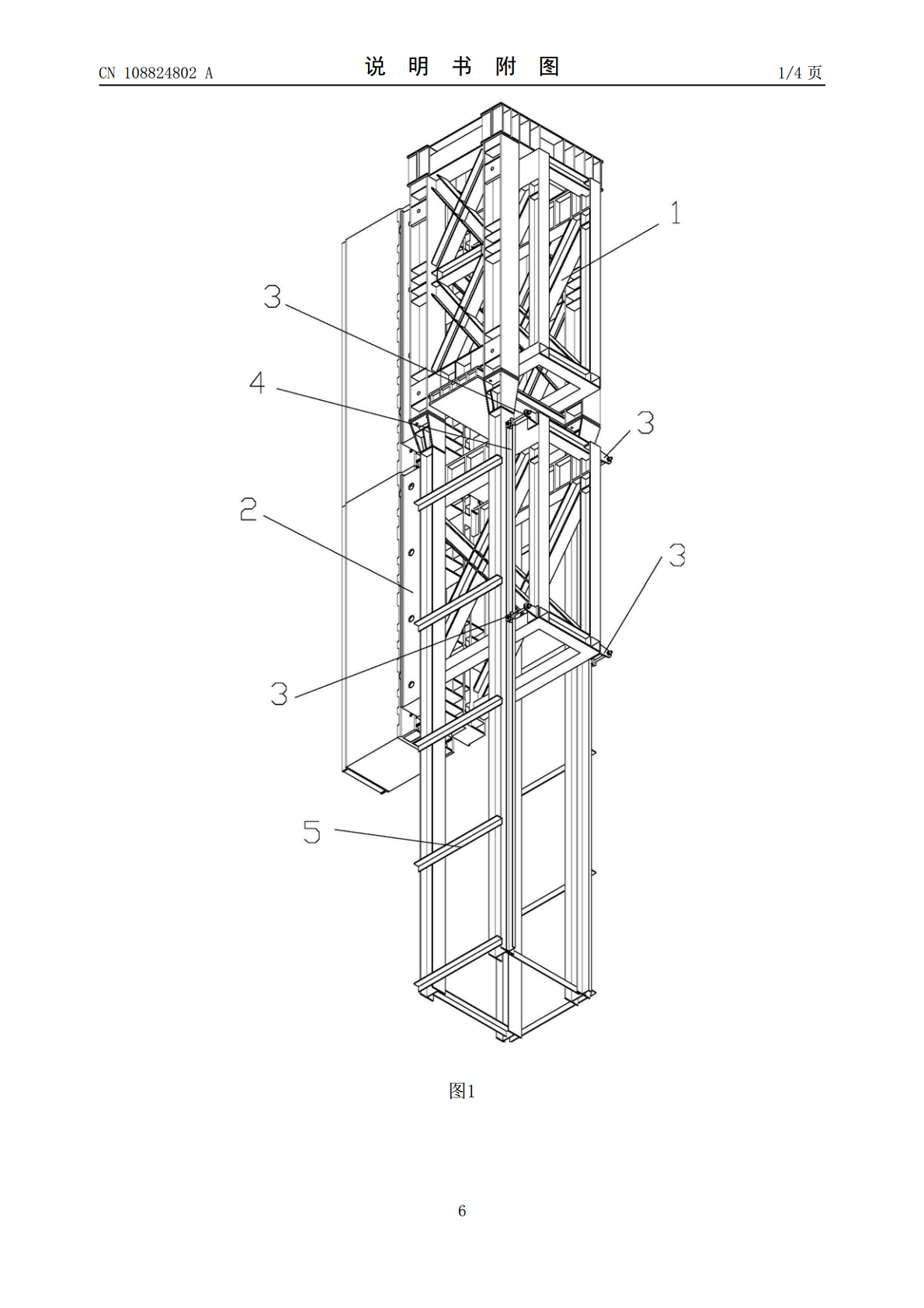
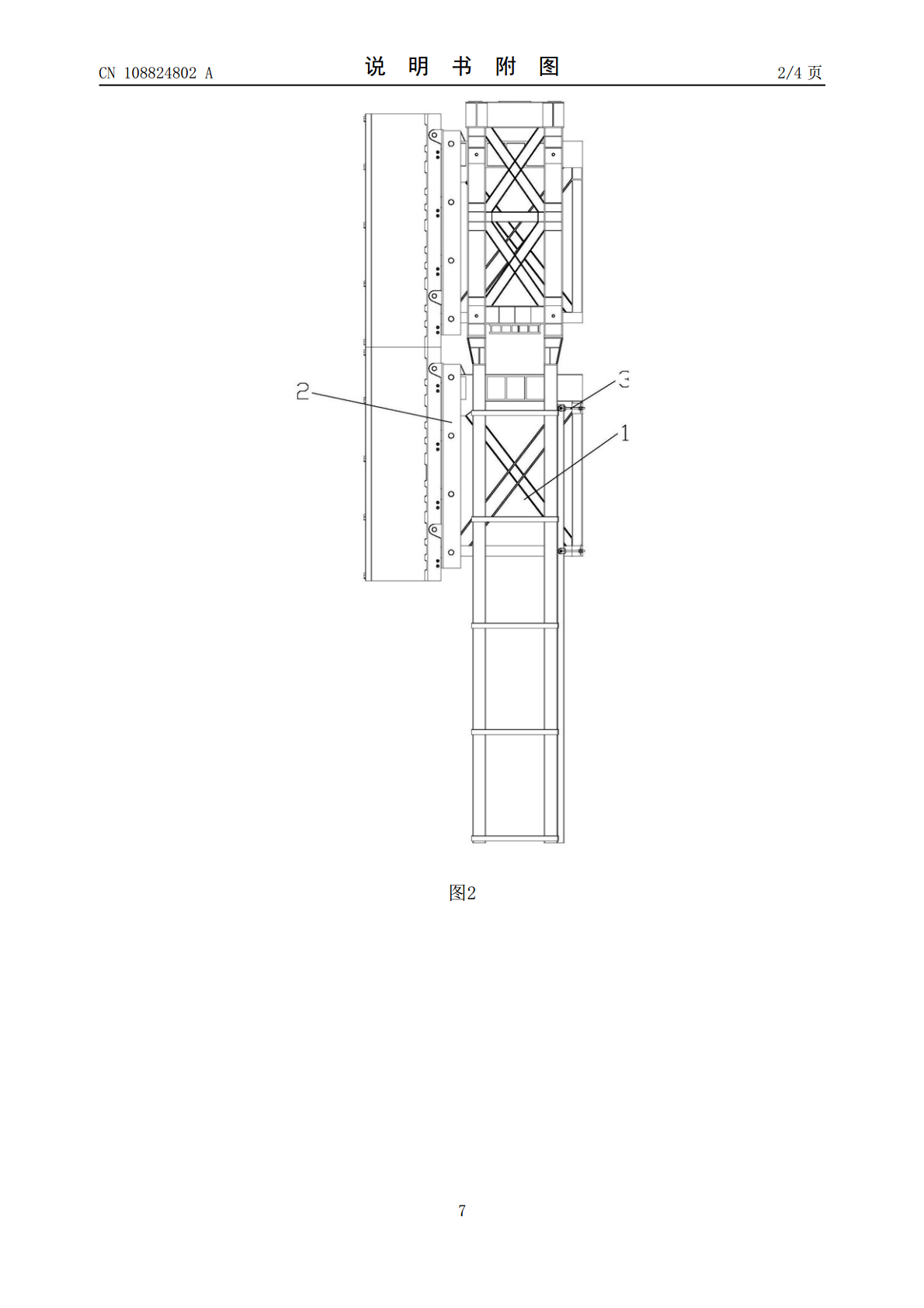
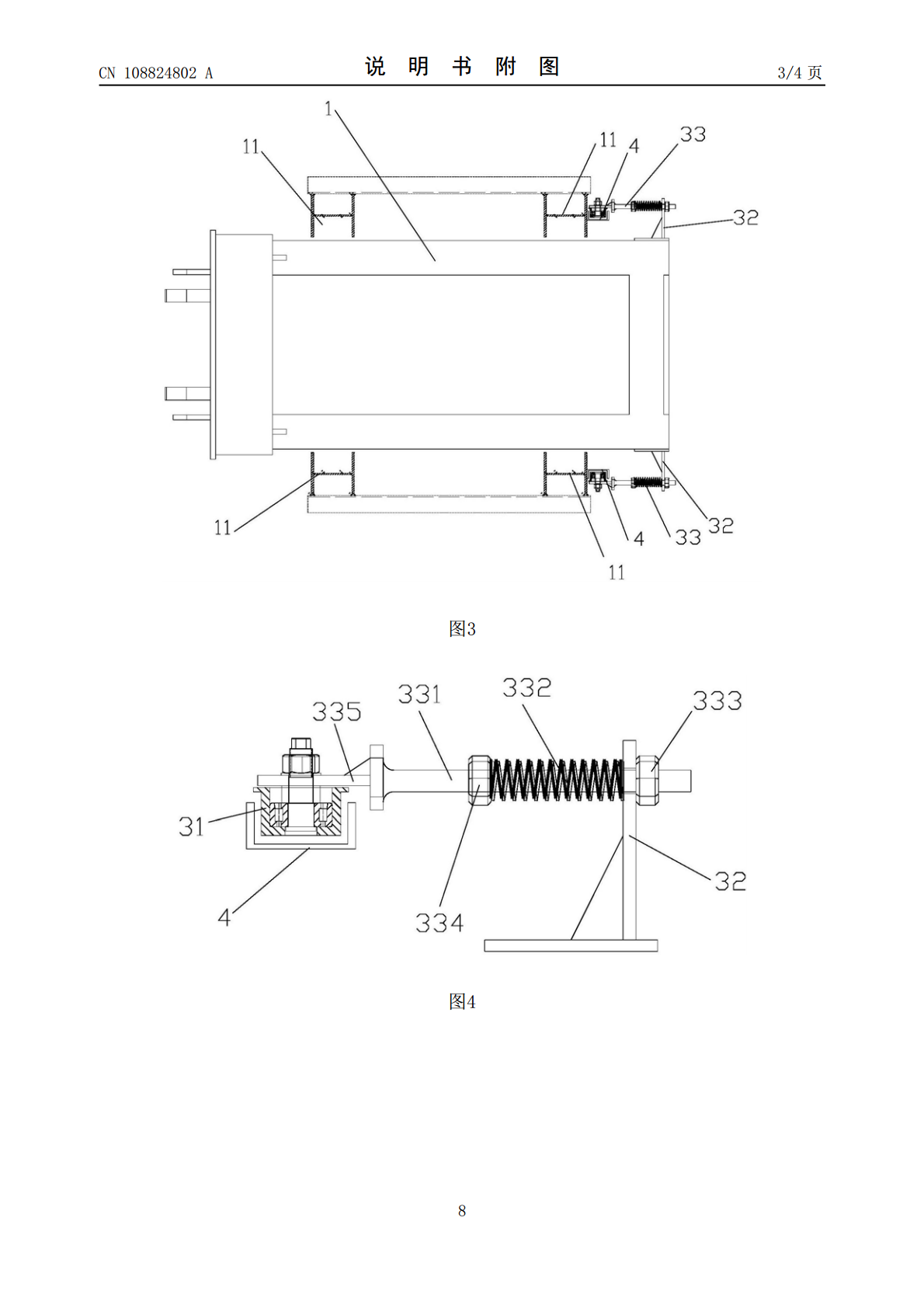
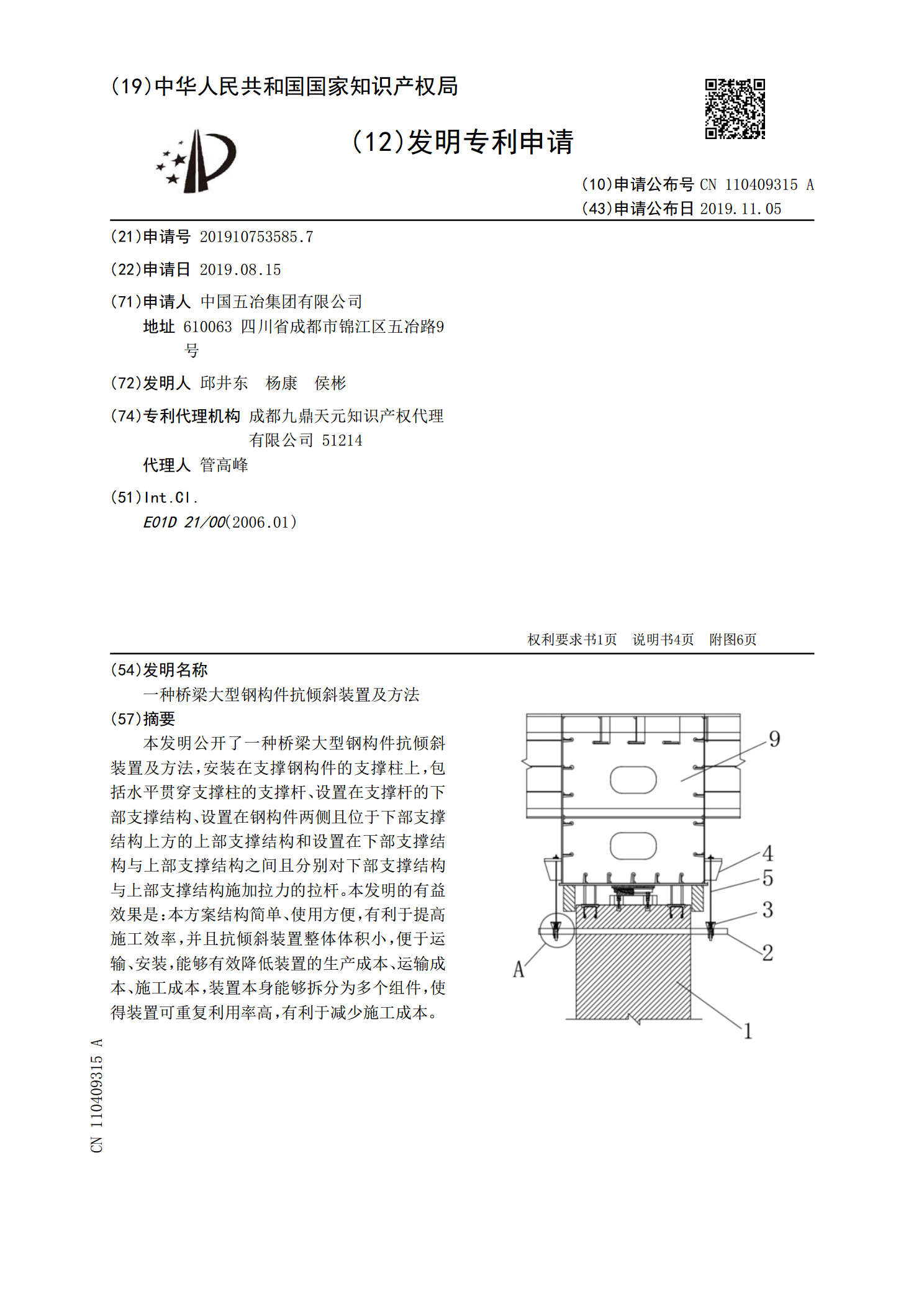
本发明公开了一种桥梁大型钢构件抗倾斜装置及方法,安装在支撑钢构件的支撑柱上,包括水平贯穿支撑柱的支撑杆、设置在支撑杆的下部支撑结构、设置在钢构件两侧且位于下部支撑结构上方的上部支撑结构和设置在下部支撑结构与上部支撑结构之间且分别对下部支撑结构与上部支撑结构施加拉力的拉杆。本发明的有益效果是:本方案结构简单、使用方便,有利于提高施工效率,并且抗倾斜装置整体体积小,便于运输、安装,能够有效降低装置的生产成本、运输成本、施工成本,装置本身能够拆分为多个组件,使得装置可重复利用率高,有利于减少施工成本。

倾斜测量装置及倾斜测量方法.pdf
倾斜测量装置具有第一激光位移计和第二激光位移计。第一激光位移计对测量对象物照射第一激光来测量测量对象物的位移。第二激光位移计对测量对象物照射第二激光来测量测量对象物的位移。反射构件位于相对于第一激光的光路和第二激光的光路的退避位置或进入位置。在反射构件位于退避位置的情况和位于进入位置的情况这两者时,第一激光位移计和第二激光位移计测量测量对象物的位移。反射构件在进入位置时改变第一激光和第二激光的前进方向,使第一激光和第二激光朝向测量对象物进行反射。