
基于结构标靶的目标相对位姿测量方法.pdf

永香****能手


1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于结构标靶的目标相对位姿测量方法.pdf
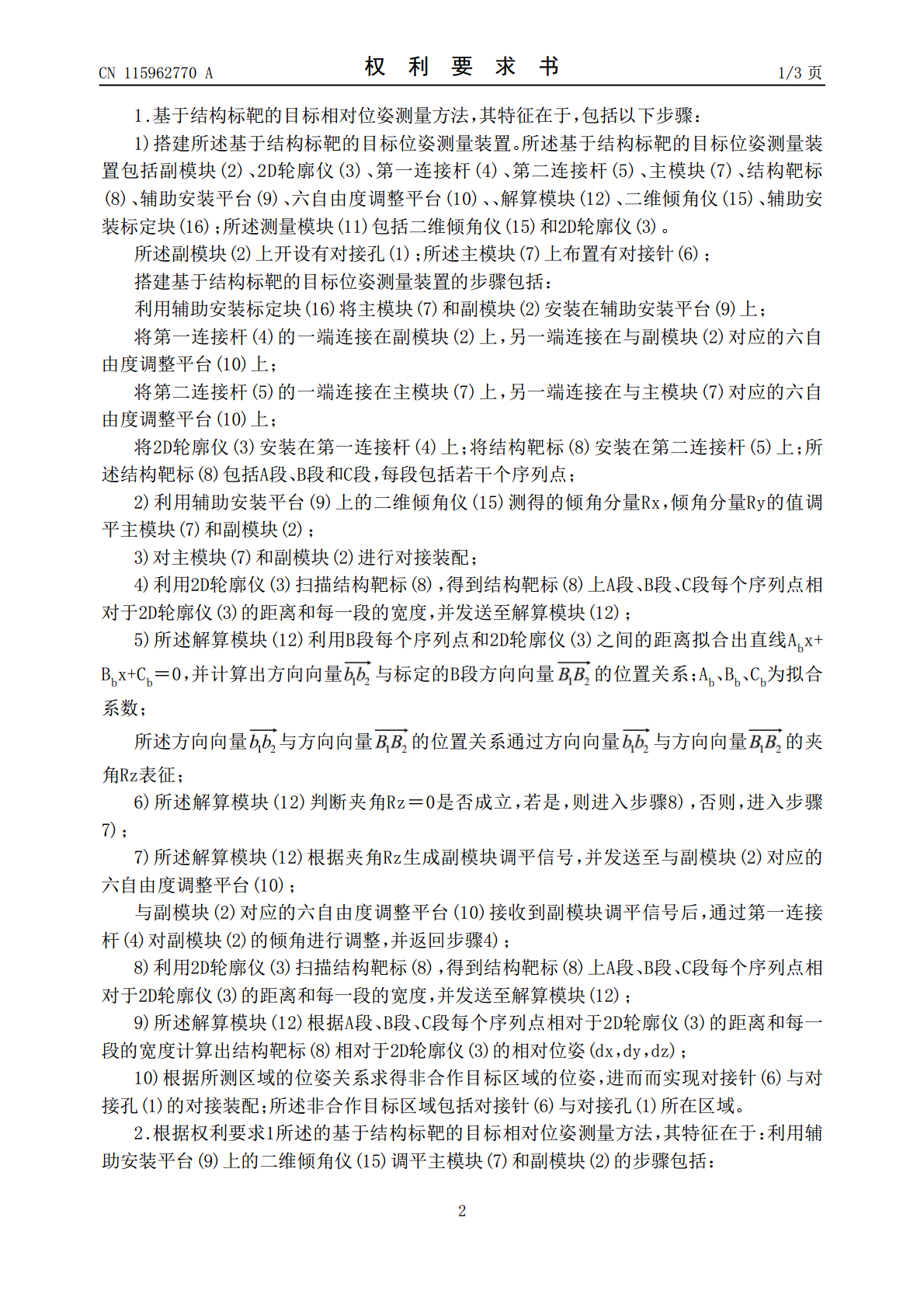
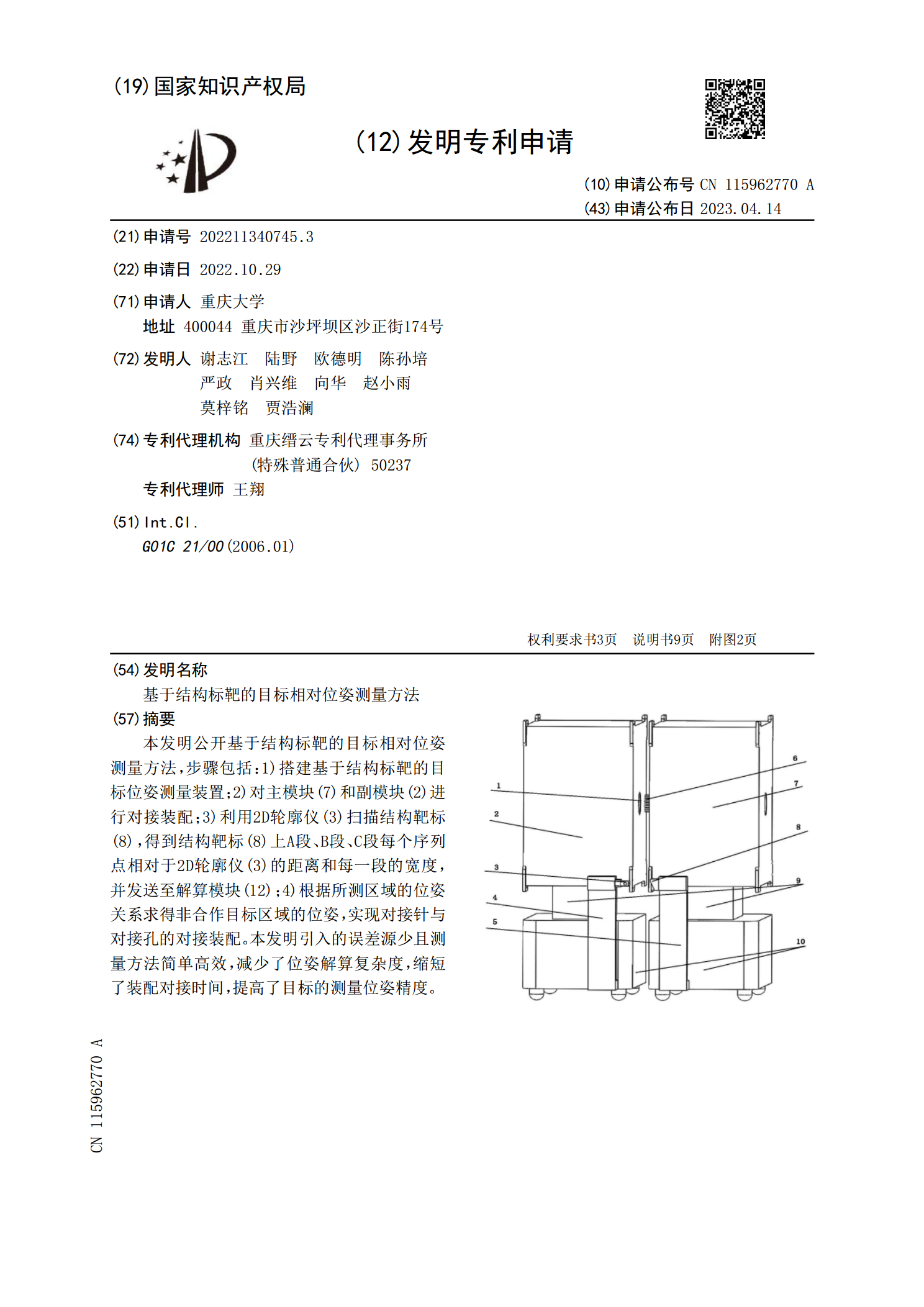
本发明公开基于结构标靶的目标相对位姿测量方法,步骤包括:1)搭建基于结构标靶的目标位姿测量装置;2)对主模块(7)和副模块(2)进行对接装配;3)利用2D轮廓仪(3)扫描结构靶标(8),得到结构靶标(8)上A段、B段、C段每个序列点相对于2D轮廓仪(3)的距离和每一段的宽度,并发送至解算模块(12);4)根据所测区域的位姿关系求得非合作目标区域的位姿,实现对接针与对接孔的对接装配。本发明引入的误差源少且测量方法简单高效,减少了位姿解算复杂度,缩短了装配对接时间,提高了目标的测量位姿精度。

一种基于TOF相机的空间合作目标相对位姿测量方法.docx
一种基于TOF相机的空间合作目标相对位姿测量方法标题:基于TOF相机的空间合作目标相对位姿测量方法摘要:空间合作是现代科技应用中的一个重要领域,其中实现目标相对位姿测量是一个关键问题。本文提出了一种基于TOF(Time-of-Flight)相机的空间合作目标相对位姿测量方法。该方法利用TOF相机获取目标表面的深度图像,并从中提取表面特征,然后使用特征匹配的方法计算目标之间的相对位姿。实验结果表明,该方法能够精确地测量目标之间的相对位姿。关键词:TOF相机、空间合作、目标相对位姿、深度图像、特征匹配引言:空
一种基于深度学习的非合作目标相对位姿测量方法、系统.pdf
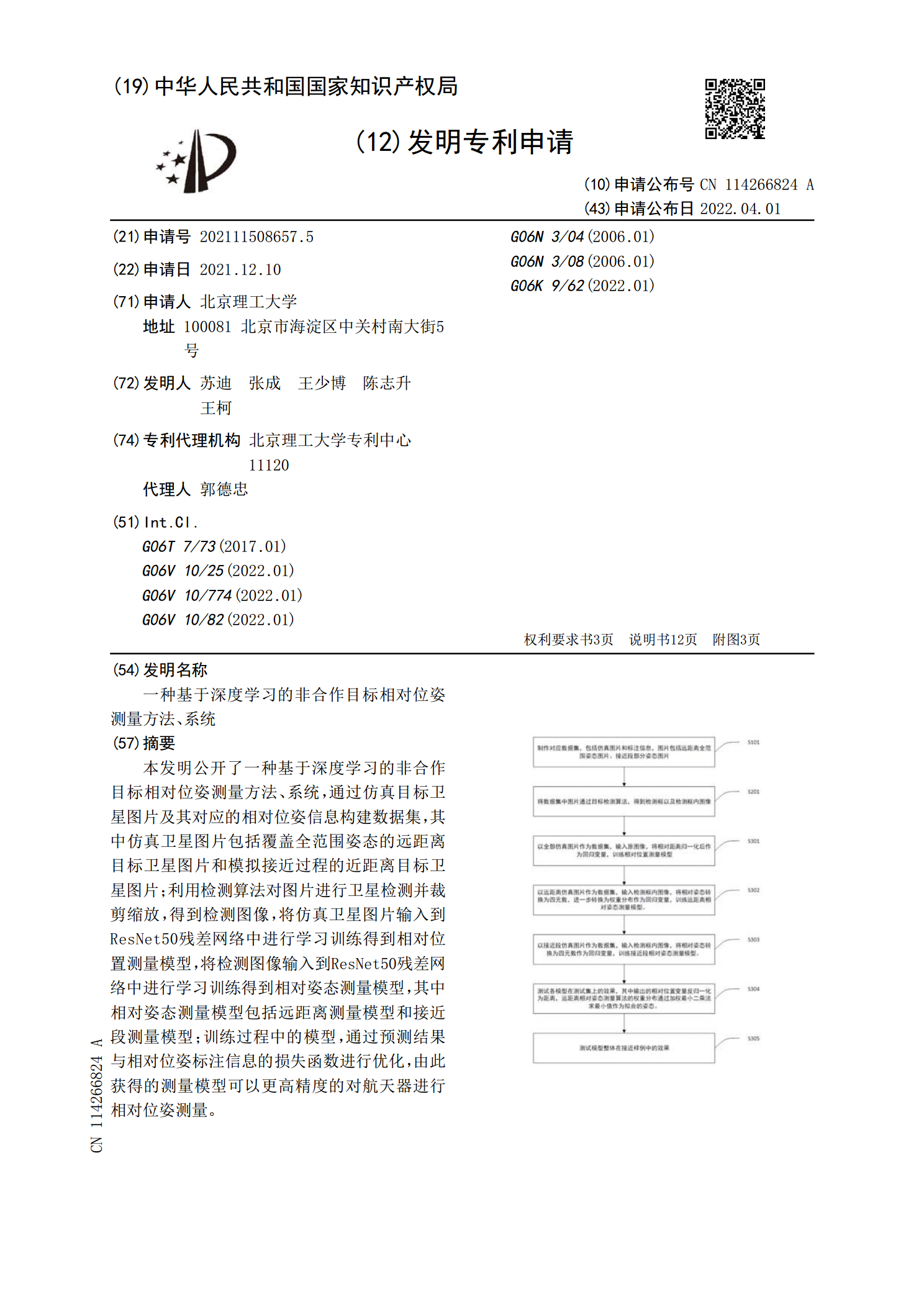
本发明公开了一种基于深度学习的非合作目标相对位姿测量方法、系统,通过仿真目标卫星图片及其对应的相对位姿信息构建数据集,其中仿真卫星图片包括覆盖全范围姿态的远距离目标卫星图片和模拟接近过程的近距离目标卫星图片;利用检测算法对图片进行卫星检测并裁剪缩放,得到检测图像,将仿真卫星图片输入到ResNet50残差网络中进行学习训练得到相对位置测量模型,将检测图像输入到ResNet50残差网络中进行学习训练得到相对姿态测量模型,其中相对姿态测量模型包括远距离测量模型和接近段测量模型;训练过程中的模型,通过预测结果与相

基于视觉的大尺度部件相对位姿实时测量方法研究.docx
基于视觉的大尺度部件相对位姿实时测量方法研究随着现代工业制造和自动化技术的不断发展,对于大尺度部件相对位姿的实时测量与控制变得越来越重要。在很多应用领域如航空、航天、汽车、机器人等中,需要准确的测量和控制大型工件的相对位置关系,以确保它们的高度可靠性、精度和稳定性。本文将介绍一种基于视觉的大尺度部件相对位姿实时测量方法。一、概述位姿测量是指测量物体的位置和方向(或者姿态)。大尺度部件相对位姿测量,即测量物体相对于其他物体的位置和姿态。在工业制造中,需要在机器人操作或移动工作台上进行这样的测量,以确保准确和
小尺寸相贯结构相对位置精确测量方法.pdf
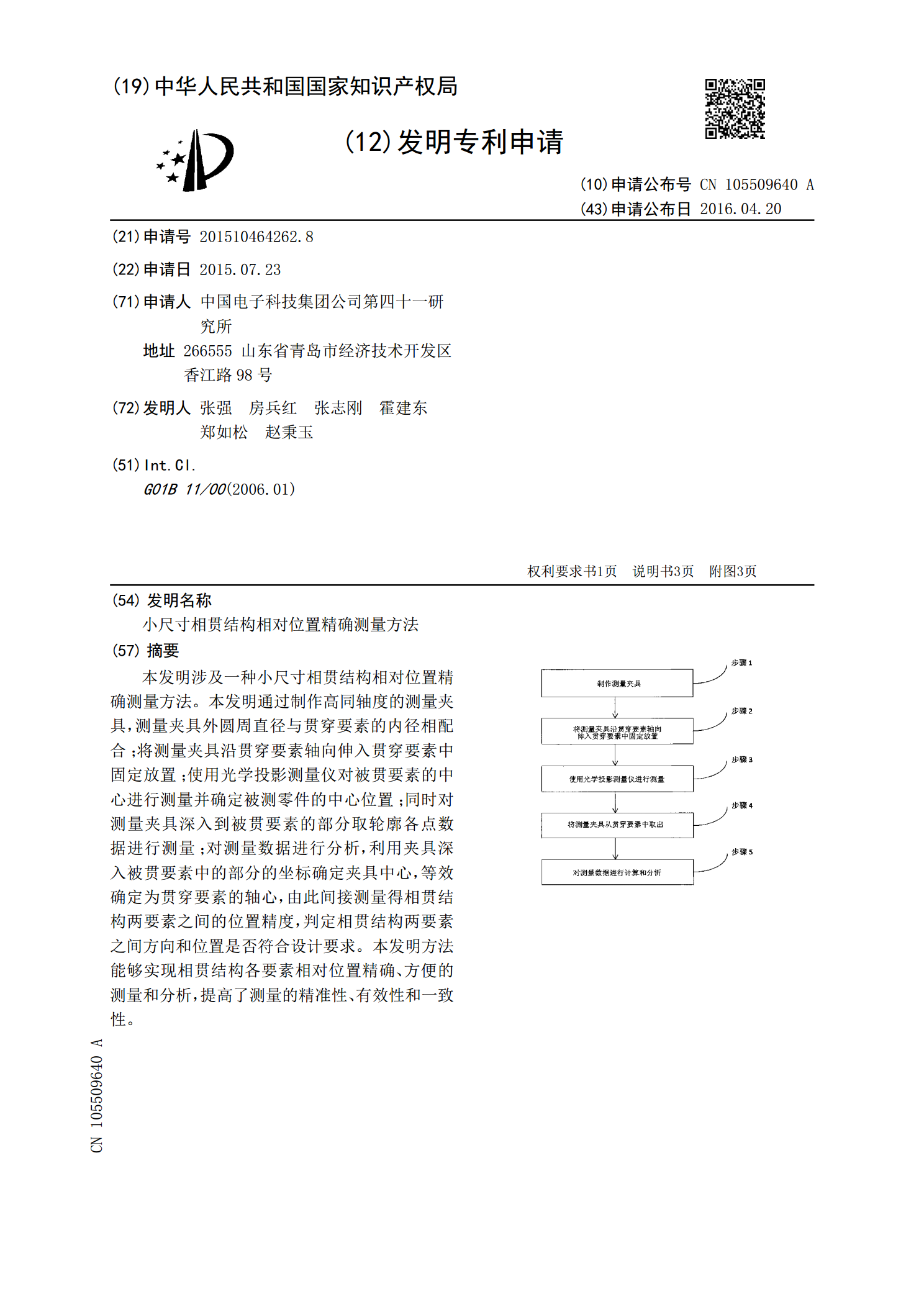
本发明涉及一种小尺寸相贯结构相对位置精确测量方法。本发明通过制作高同轴度的测量夹具,测量夹具外圆周直径与贯穿要素的内径相配合;将测量夹具沿贯穿要素轴向伸入贯穿要素中固定放置;使用光学投影测量仪对被贯要素的中心进行测量并确定被测零件的中心位置;同时对测量夹具深入到被贯要素的部分取轮廓各点数据进行测量;对测量数据进行分析,利用夹具深入被贯要素中的部分的坐标确定夹具中心,等效确定为贯穿要素的轴心,由此间接测量得相贯结构两要素之间的位置精度,判定相贯结构两要素之间方向和位置是否符合设计要求。本发明方法能够实现相贯