
全自动刷板清洁设备以及方法.pdf

努力****元恺

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共44页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

全自动刷板清洁设备以及方法.pdf
本发明涉及一种全自动刷板清洁设备,包括上料机构、刷板载台、清洁装置、下料机构以及物料存储水箱,所述上料机构,用于将贴有产品的载板送至所述刷板载台;所述刷板载台,用于将所述载板夹住并带着所述载板经过所述清洁装置,由所述清洁装置进行处理,并在处理完毕后将所述载板送至所述下料机构;所述下料机构,用于将所述清洁装置处理完毕后的载板从所述刷板载台中取出并放入所述物料存储水箱;所述物料存储水箱,用于临时浸泡存储所述载板。还包括一种全自动刷板清洁方法。本发明减少人员漏失以及将物料放置在存储水箱内不及时,另外解决了半自动
下料机械手模组及其下料方法、以及全自动刷板清洁设备.pdf
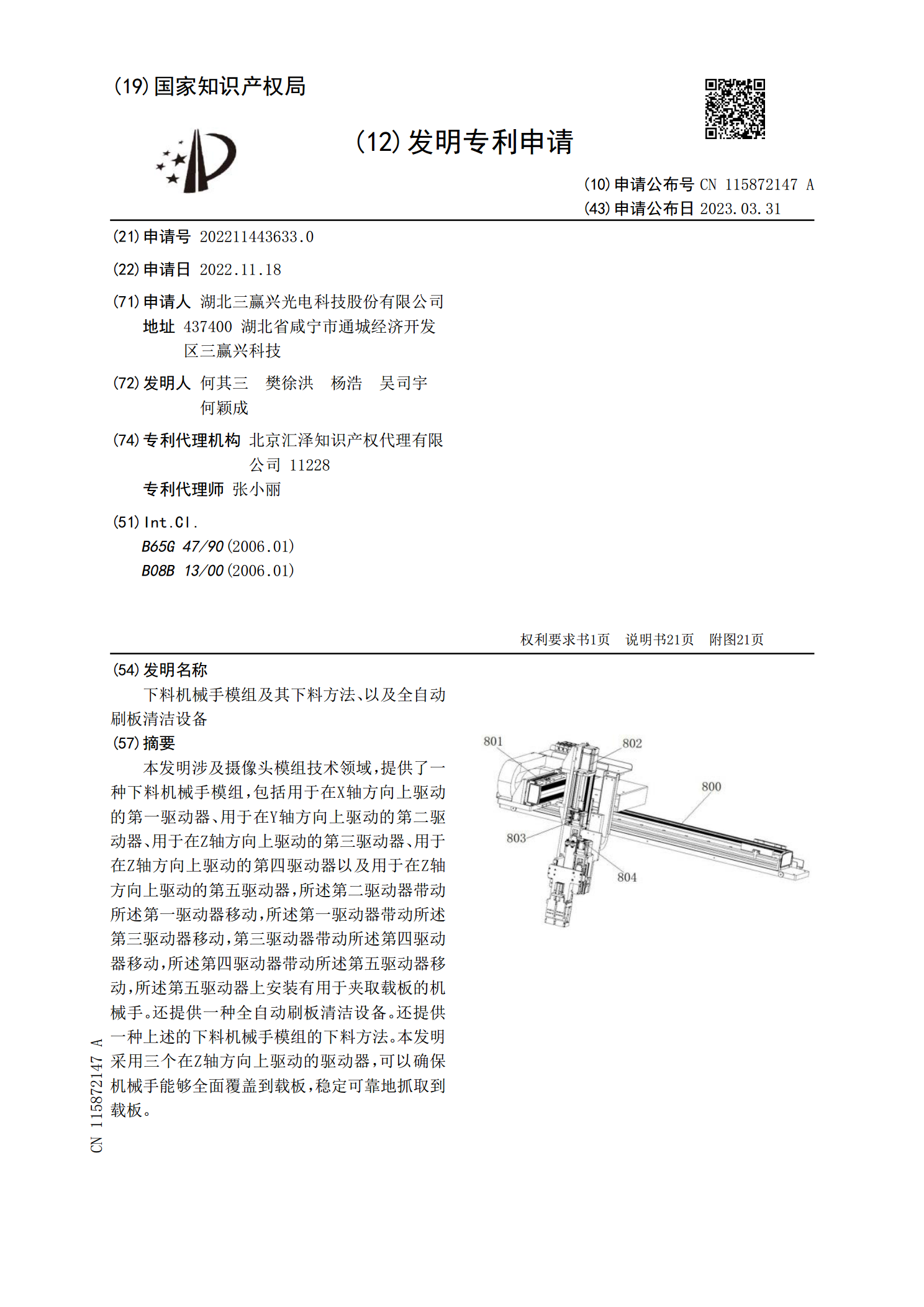
本发明涉及摄像头模组技术领域,提供了一种下料机械手模组,包括用于在X轴方向上驱动的第一驱动器、用于在Y轴方向上驱动的第二驱动器、用于在Z轴方向上驱动的第三驱动器、用于在Z轴方向上驱动的第四驱动器以及用于在Z轴方向上驱动的第五驱动器,所述第二驱动器带动所述第一驱动器移动,所述第一驱动器带动所述第三驱动器移动,第三驱动器带动所述第四驱动器移动,所述第四驱动器带动所述第五驱动器移动,所述第五驱动器上安装有用于夹取载板的机械手。还提供一种全自动刷板清洁设备。还提供一种上述的下料机械手模组的下料方法。本发明采用三个
一种全自动刷板清洁方法.pdf
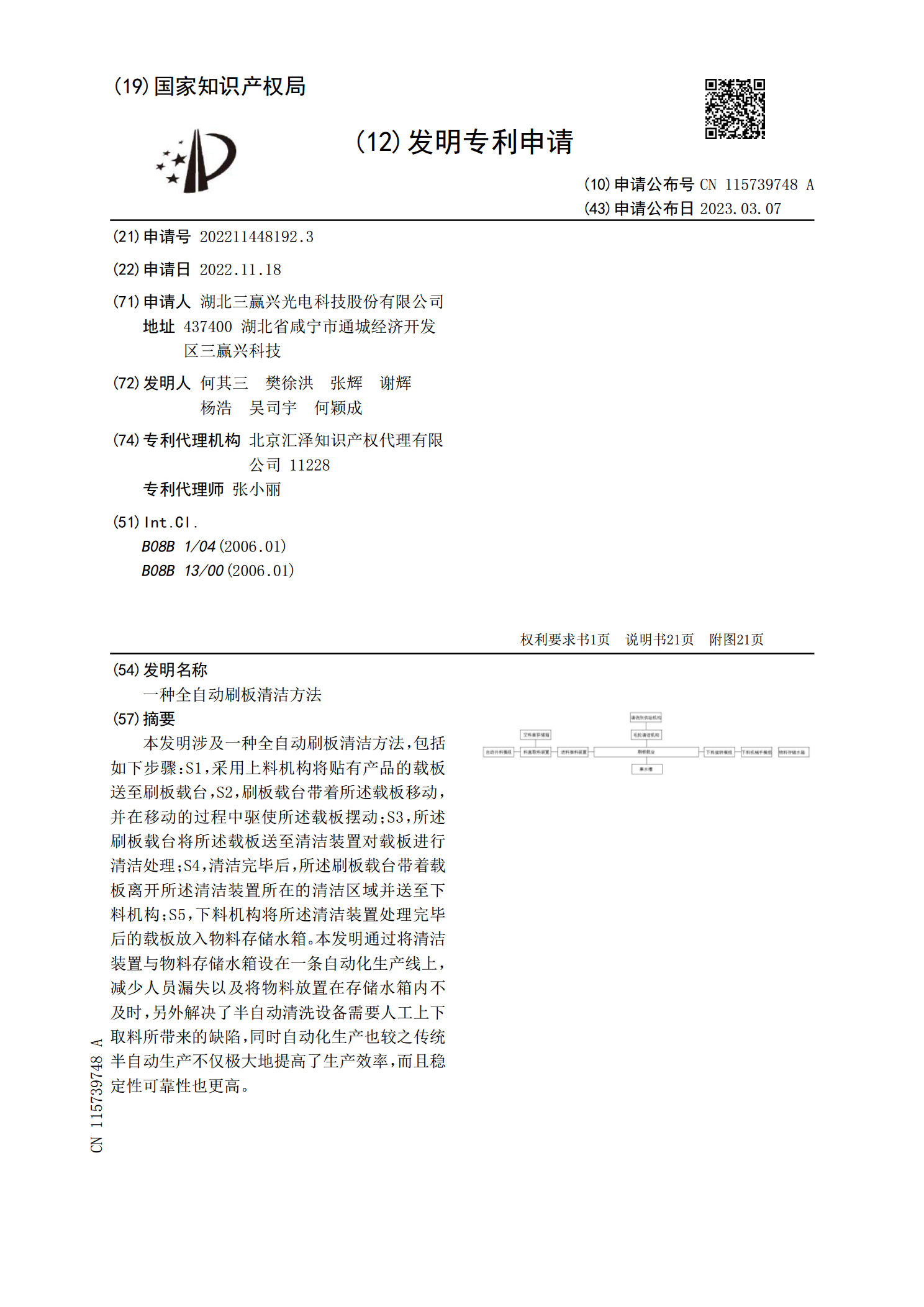
本发明涉及一种全自动刷板清洁方法,包括如下步骤:S1,采用上料机构将贴有产品的载板送至刷板载台,S2,刷板载台带着所述载板移动,并在移动的过程中驱使所述载板摆动;S3,所述刷板载台将所述载板送至清洁装置对载板进行清洁处理;S4,清洁完毕后,所述刷板载台带着载板离开所述清洁装置所在的清洁区域并送至下料机构;S5,下料机构将所述清洁装置处理完毕后的载板放入物料存储水箱。本发明通过将清洁装置与物料存储水箱设在一条自动化生产线上,减少人员漏失以及将物料放置在存储水箱内不及时,另外解决了半自动清洗设备需要人工上下取
清洁设备的控制方法、清洁设备以及存储介质.pdf
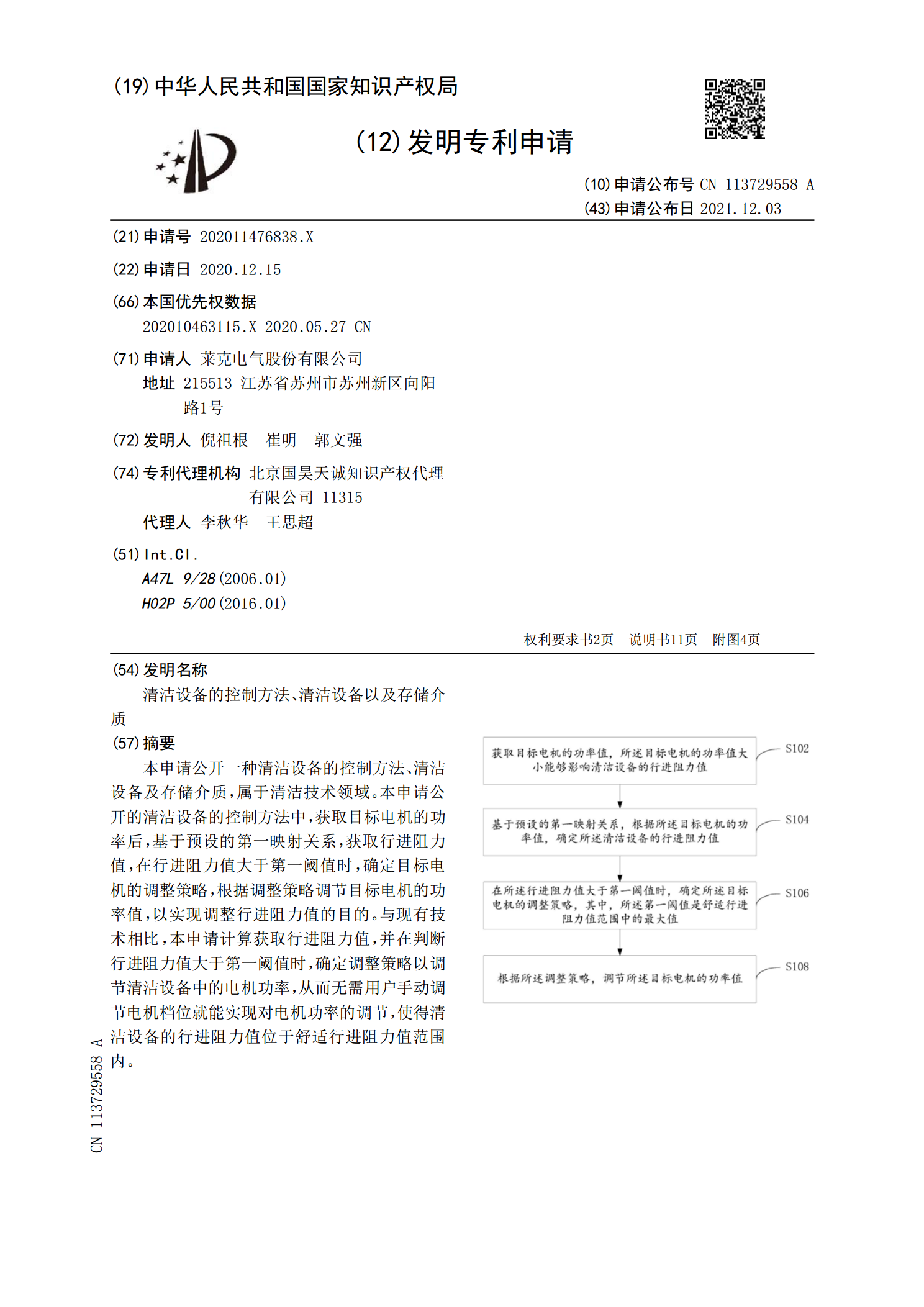
本申请公开一种清洁设备的控制方法、清洁设备及存储介质,属于清洁技术领域。本申请公开的清洁设备的控制方法中,获取目标电机的功率后,基于预设的第一映射关系,获取行进阻力值,在行进阻力值大于第一阈值时,确定目标电机的调整策略,根据调整策略调节目标电机的功率值,以实现调整行进阻力值的目的。与现有技术相比,本申请计算获取行进阻力值,并在判断行进阻力值大于第一阈值时,确定调整策略以调节清洁设备中的电机功率,从而无需用户手动调节电机档位就能实现对电机功率的调节,使得清洁设备的行进阻力值位于舒适行进阻力值范围内。

清洁设备的控制方法、清洁设备以及存储介质.pdf
本发明公开一种清洁设备的控制方法、清洁设备及存储介质,属于清洁技术领域。本发明公开的清洁设备的控制方法中,通过获取清洁设备的行进阻力值,在行进阻力值大于第一阈值时,根据行进阻力值,调整目标参数至目标值,以使得行进阻力值位于舒适行进阻力值范围内,以避免由于行进阻力值过大而导致清洁设备难以行进。其中,第一阈值是舒适行进阻力值范围内的最大值,目标参数是影响地刷口真空度的参数中的至少一种,目标值对应的地刷口真空度与行进阻力负相关,由此在第一行进阻力值大于第一阈值时,通过调整目标参数至目标值来降低地刷口的真空度,以