
一种化工气体管道自动对接缠绕机器人.pdf

邻家****ng

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种化工气体管道自动对接缠绕机器人.pdf
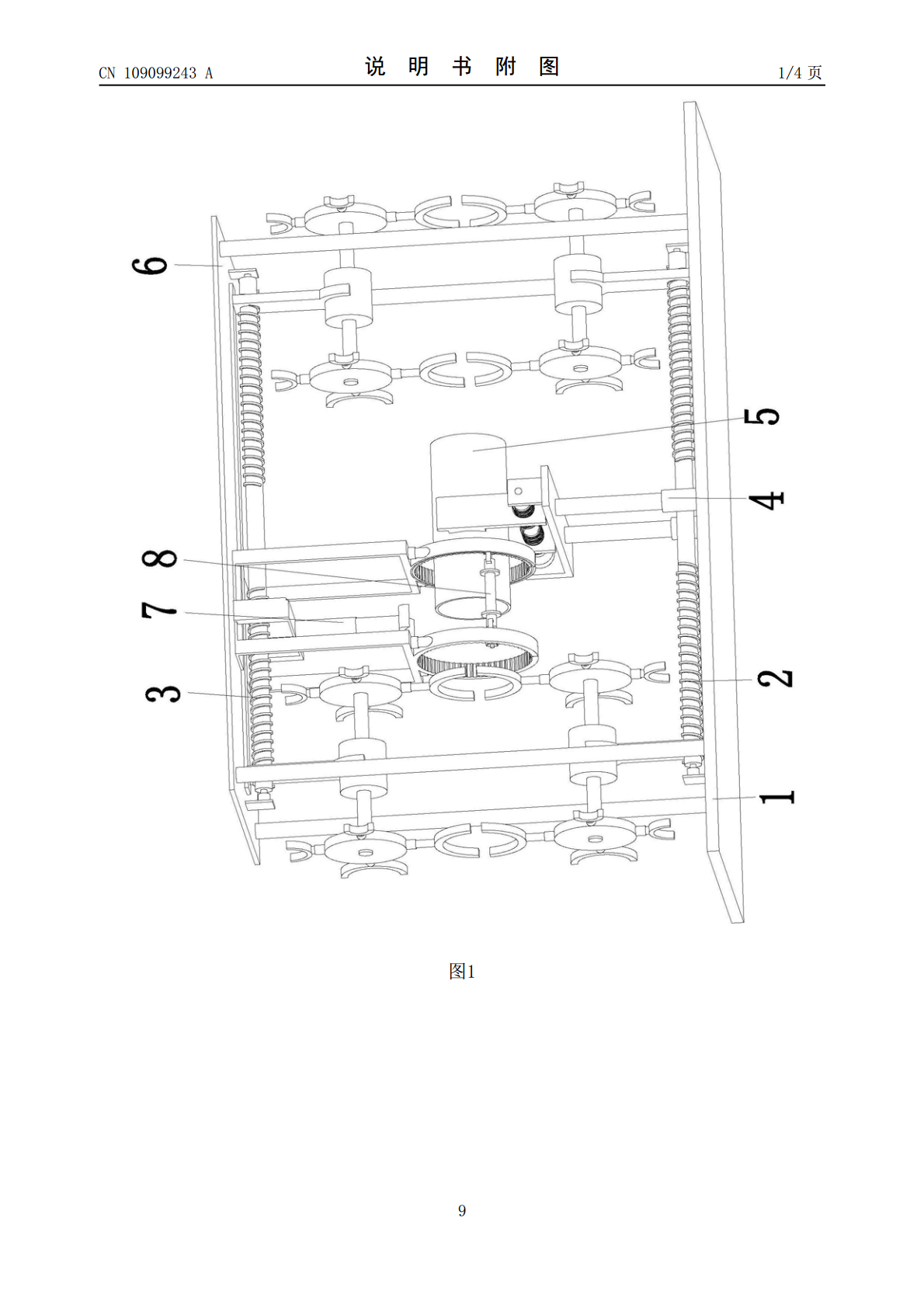
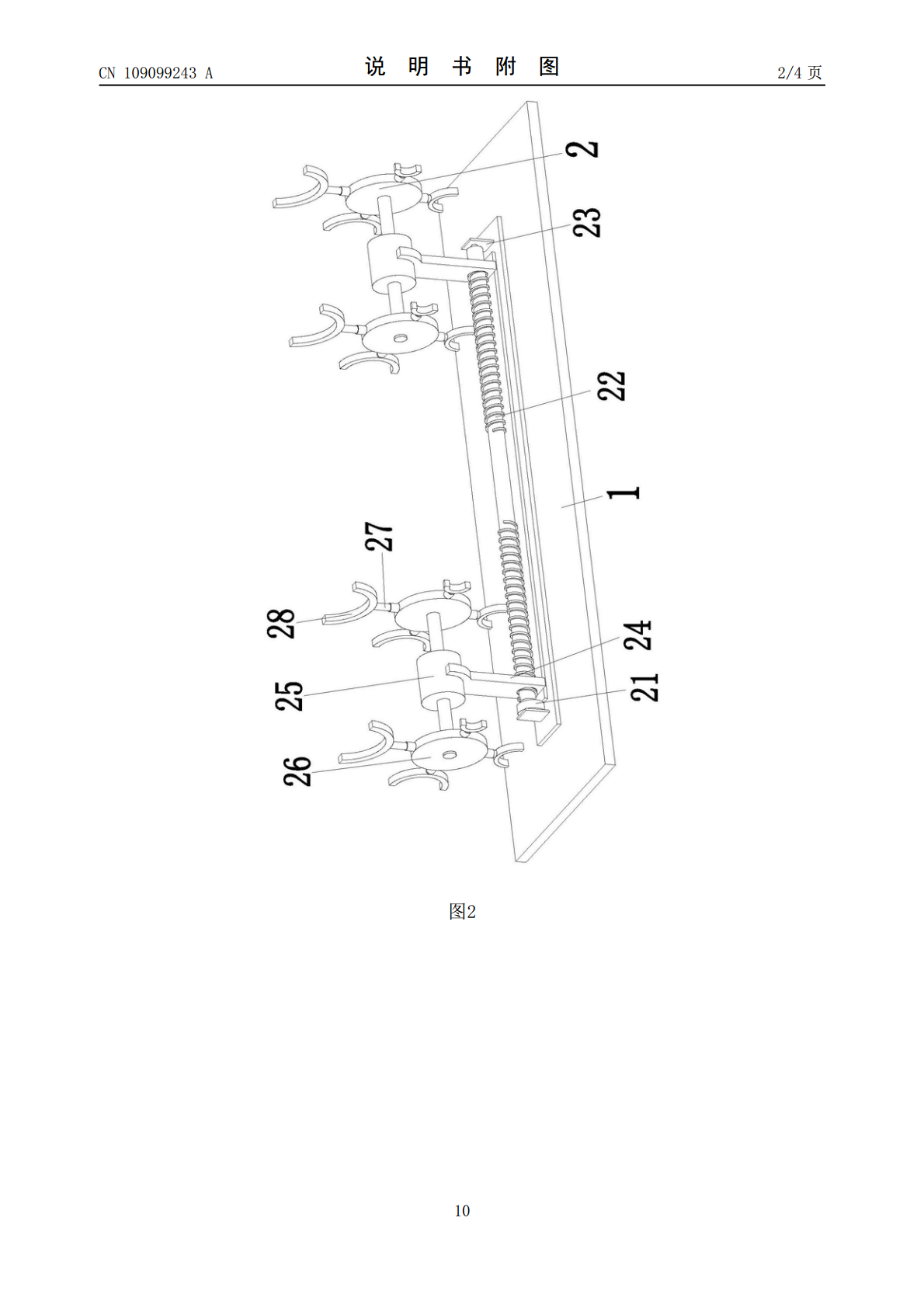
本发明涉及一种化工气体管道自动对接缠绕机器人,包括底板、一号换向夹持机构、二号换向夹持机构、固定机构、钢管套、支撑架、按压缠绕机构和缠绕执行机构,本发明提供的一种化工气体管道自动对接缠绕机器人,可以解决气体管道对接过程中存在的人工缠绕密封胶密封性不稳定的问题,为了对管道对接过程中的密封胶带缠绕,工人师傅通常在管道缠绕过程中花费大量时间,进行重复性工作增大了劳动强度,且长时间的缠绕操作往往不能保证缠绕的质量,导致其稳定性差,工作效率低等问题;可以实现自动化缠绕管道密封胶带的功能,能够把管道密封胶带均匀的缠绕
一种化工气体管道自动加工设备.pdf
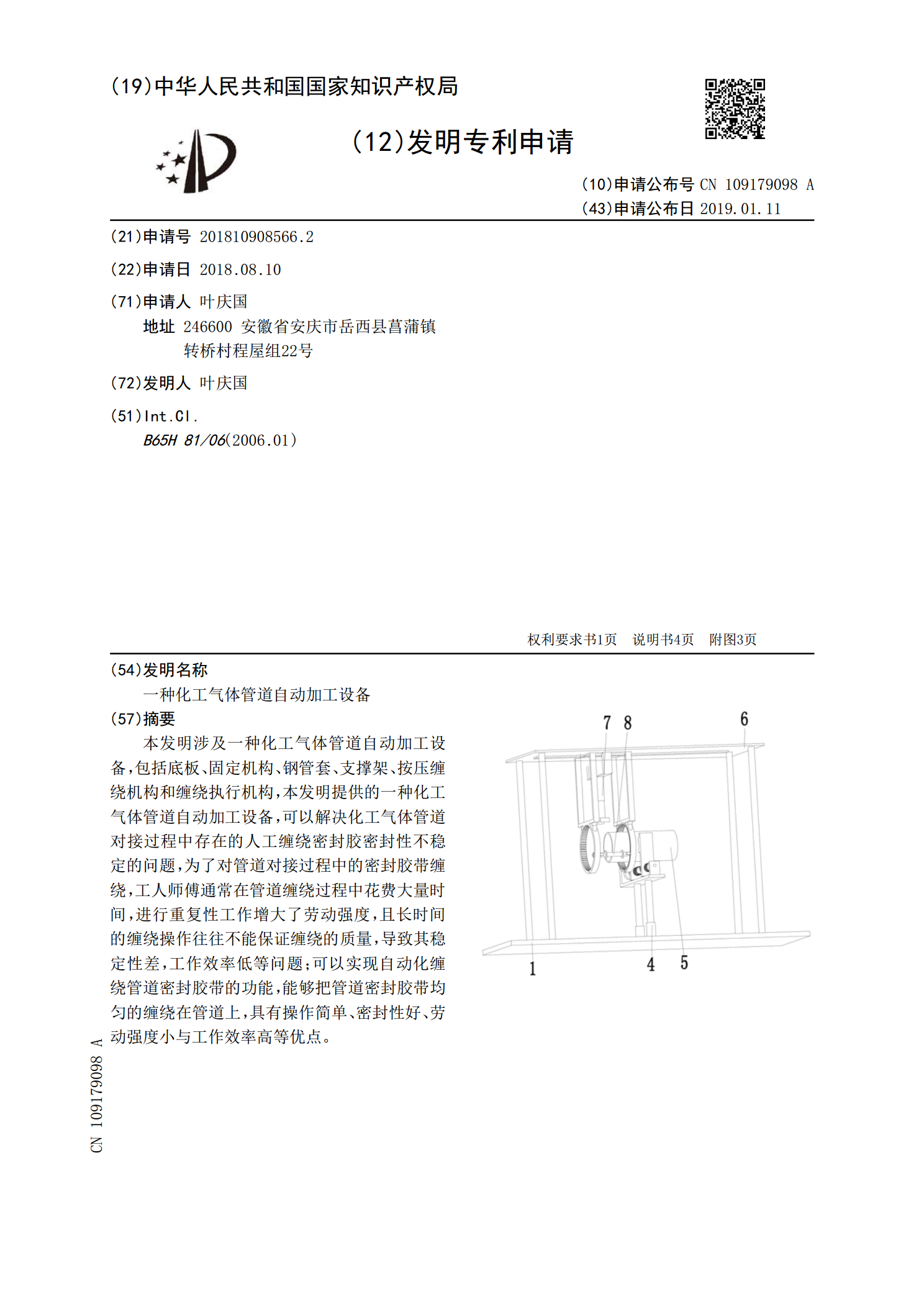
本发明涉及一种化工气体管道自动加工设备,包括底板、固定机构、钢管套、支撑架、按压缠绕机构和缠绕执行机构,本发明提供的一种化工气体管道自动加工设备,可以解决化工气体管道对接过程中存在的人工缠绕密封胶密封性不稳定的问题,为了对管道对接过程中的密封胶带缠绕,工人师傅通常在管道缠绕过程中花费大量时间,进行重复性工作增大了劳动强度,且长时间的缠绕操作往往不能保证缠绕的质量,导致其稳定性差,工作效率低等问题;可以实现自动化缠绕管道密封胶带的功能,能够把管道密封胶带均匀的缠绕在管道上,具有操作简单、密封性好、劳动强度小

一种多模块自动对接的管道清淤机器人.pdf
本发明公开了一种多模块自动对接的管道清淤机器人,包括:清淤模块机器人用于沿管道进行清淤作业,助动模块机器人用于与清淤模块机器人对接增强清淤模块机器人的驱动力;拖动模块机器人及收缆装置用于将清淤模块机器人和助动模块机器人拖出管道,通过模块对接器与模块对接座实现清淤模块机器人、助动模块机器人及拖动模块机器人之间的自动对接;模块对接座中,通过伺服电机驱动共轭凸轮的转动,并通过共轭凸轮的协同作用控制两个卡爪前端的开合,实现模块对接器与模块对接座的自动对接。本发明结构简单、稳定可靠、灵活机动且成本较低,能够增强机器
一种用于管道对接的管道机器人.pdf
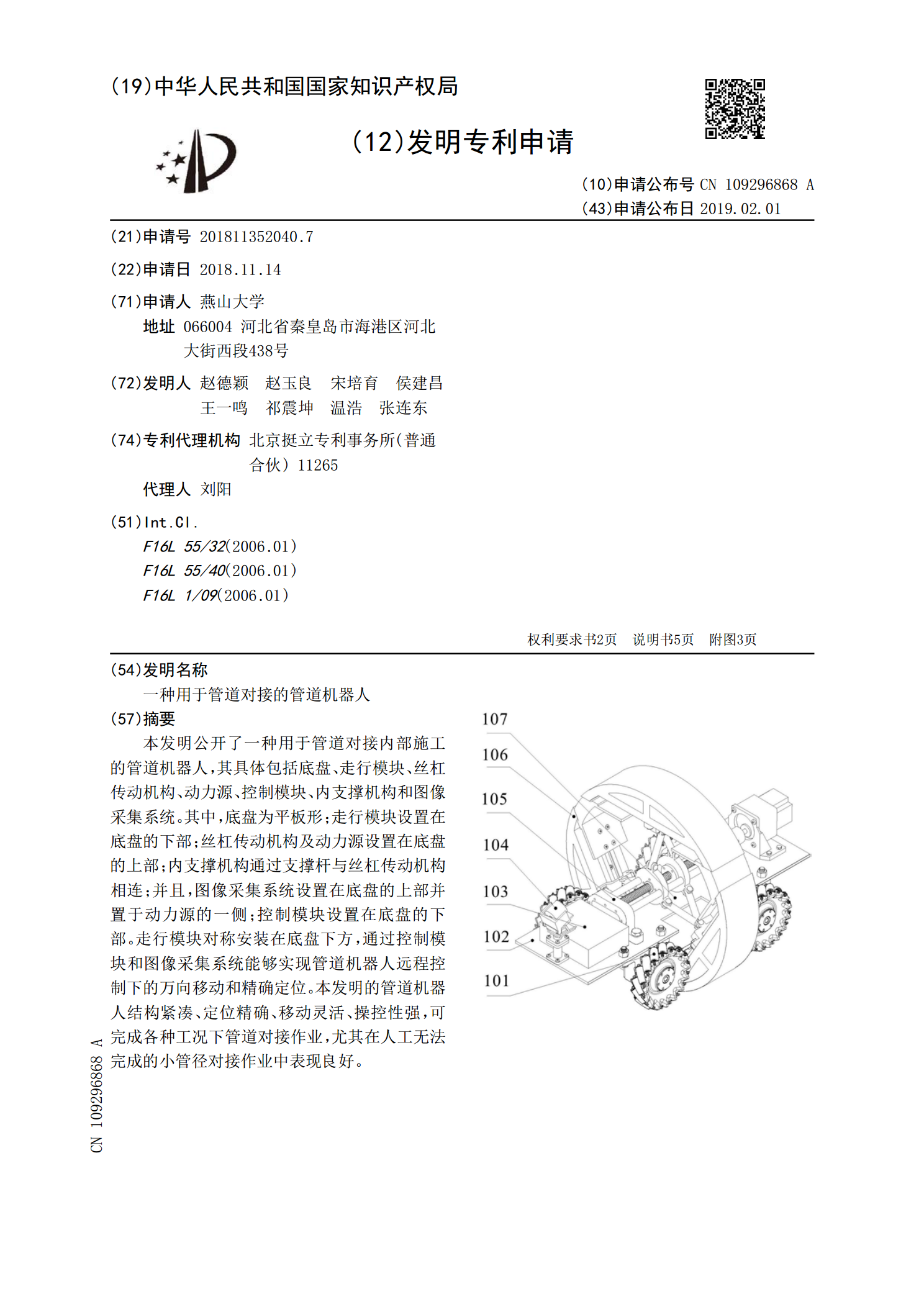
本发明公开了一种用于管道对接内部施工的管道机器人,其具体包括底盘、走行模块、丝杠传动机构、动力源、控制模块、内支撑机构和图像采集系统。其中,底盘为平板形;走行模块设置在底盘的下部;丝杠传动机构及动力源设置在底盘的上部;内支撑机构通过支撑杆与丝杠传动机构相连;并且,图像采集系统设置在底盘的上部并置于动力源的一侧;控制模块设置在底盘的下部。走行模块对称安装在底盘下方,通过控制模块和图像采集系统能够实现管道机器人远程控制下的万向移动和精确定位。本发明的管道机器人结构紧凑、定位精确、移动灵活、操控性强,可完成各种
一种气体管路接头自动对接装置.pdf
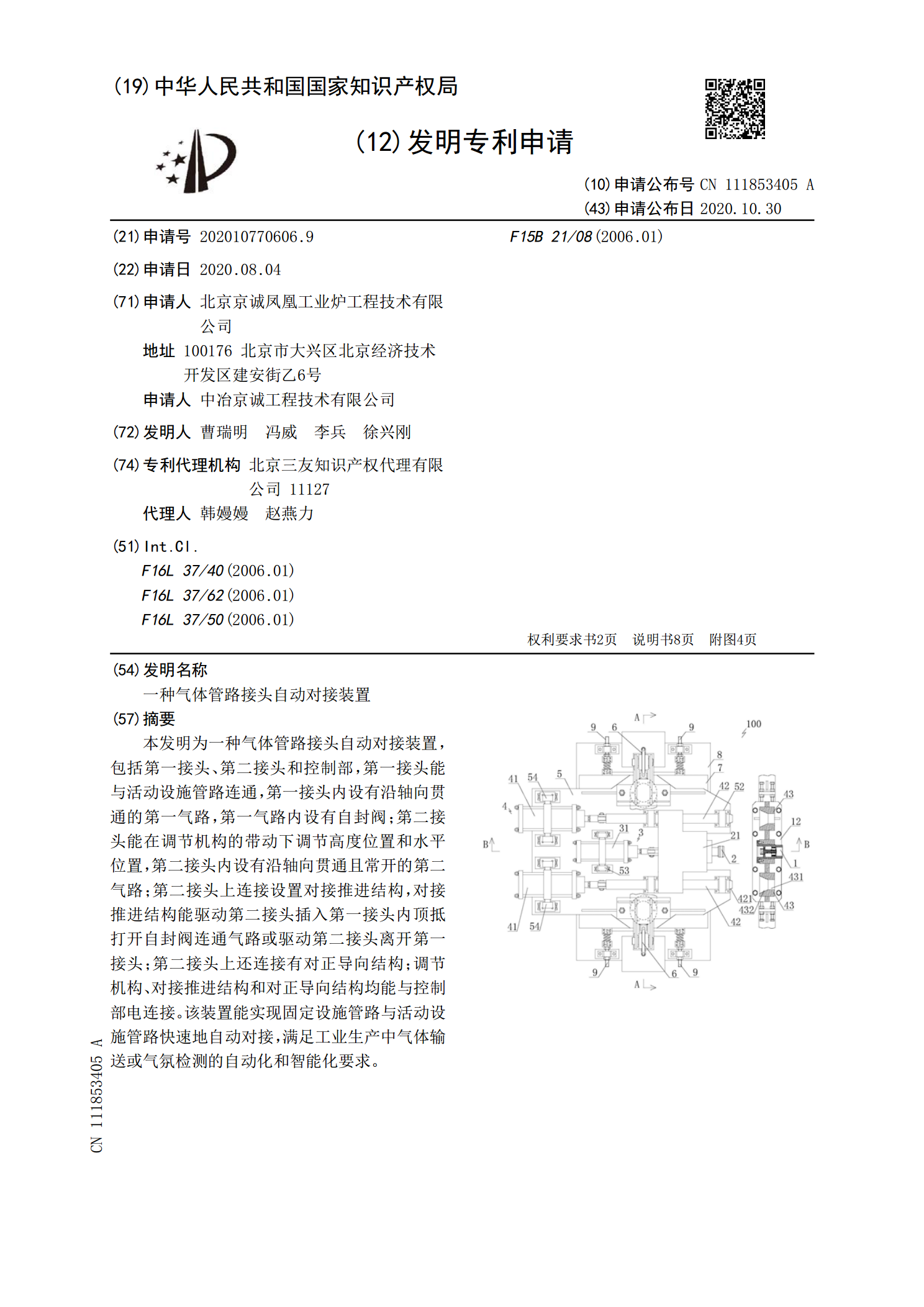
本发明为一种气体管路接头自动对接装置,包括第一接头、第二接头和控制部,第一接头能与活动设施管路连通,第一接头内设有沿轴向贯通的第一气路,第一气路内设有自封阀;第二接头能在调节机构的带动下调节高度位置和水平位置,第二接头内设有沿轴向贯通且常开的第二气路;第二接头上连接设置对接推进结构,对接推进结构能驱动第二接头插入第一接头内顶抵打开自封阀连通气路或驱动第二接头离开第一接头;第二接头上还连接有对正导向结构;调节机构、对接推进结构和对正导向结构均能与控制部电连接。该装置能实现固定设施管路与活动设施管路快速地自动