
一种智能放卷纠偏方法及纠偏系统.pdf

宜然****找我

1/10
2/10

3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能放卷纠偏方法及纠偏系统.pdf
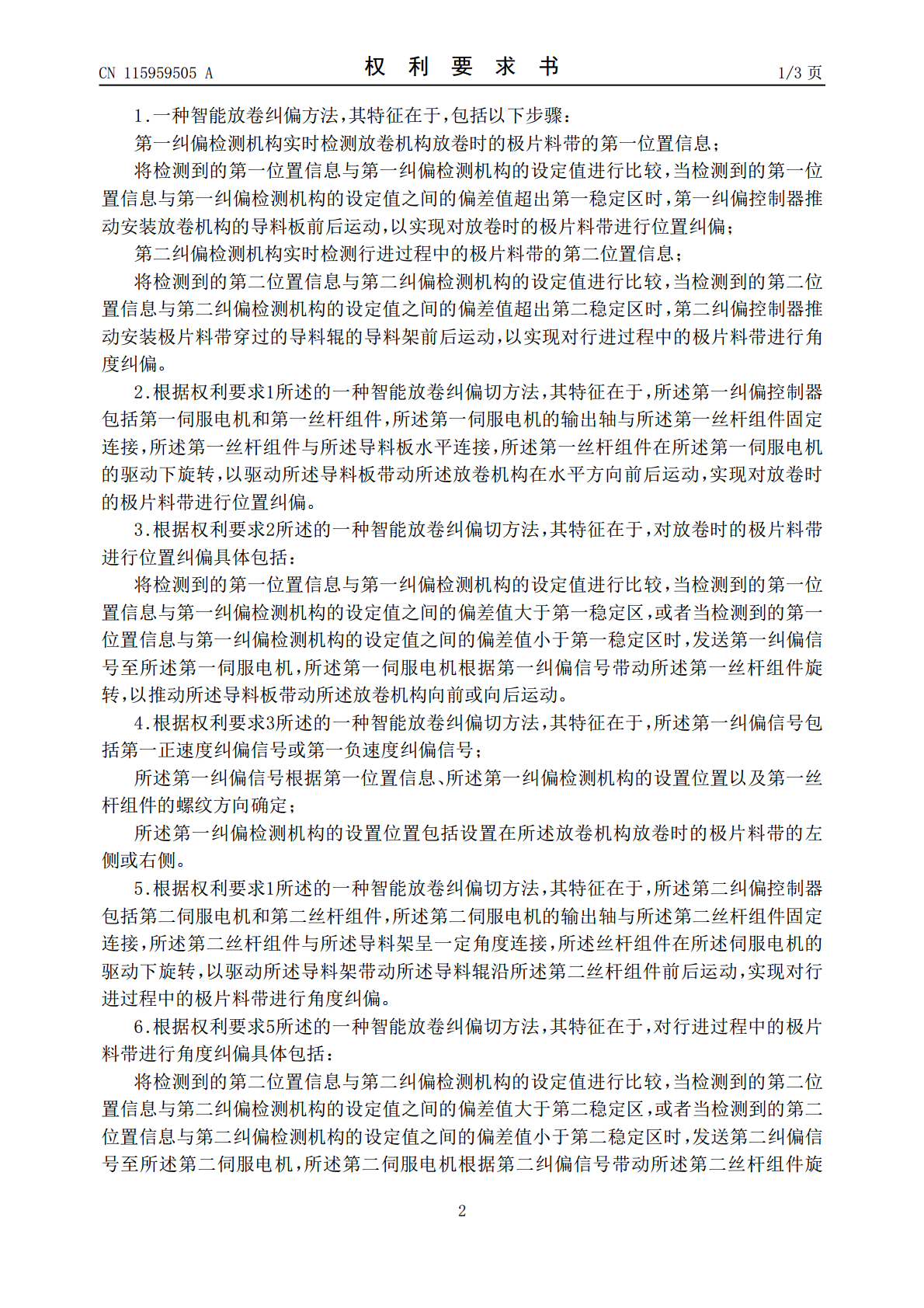
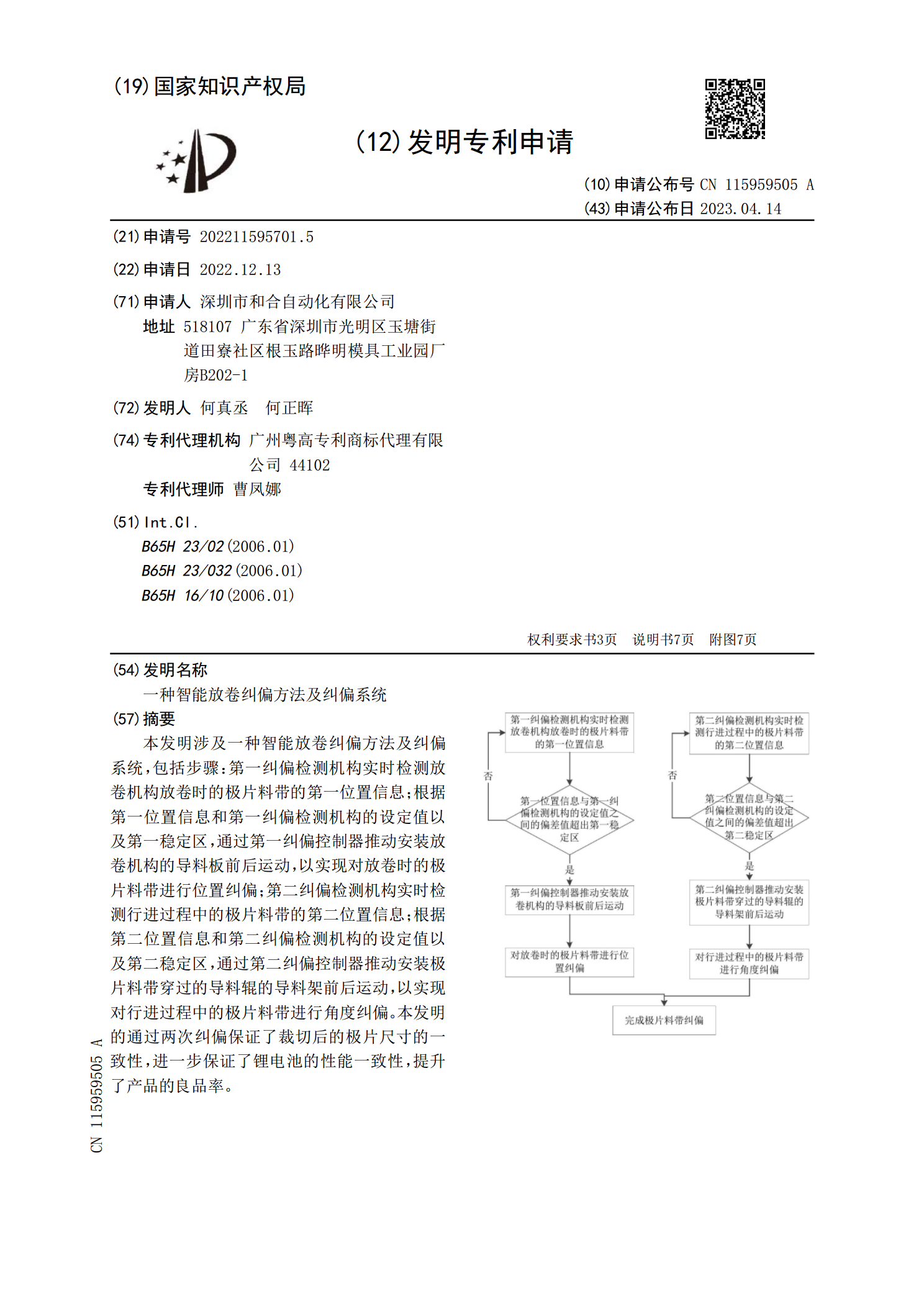
本发明涉及一种智能放卷纠偏方法及纠偏系统,包括步骤:第一纠偏检测机构实时检测放卷机构放卷时的极片料带的第一位置信息;根据第一位置信息和第一纠偏检测机构的设定值以及第一稳定区,通过第一纠偏控制器推动安装放卷机构的导料板前后运动,以实现对放卷时的极片料带进行位置纠偏;第二纠偏检测机构实时检测行进过程中的极片料带的第二位置信息;根据第二位置信息和第二纠偏检测机构的设定值以及第二稳定区,通过第二纠偏控制器推动安装极片料带穿过的导料辊的导料架前后运动,以实现对行进过程中的极片料带进行角度纠偏。本发明的通过两次纠偏保

一种皮带智能纠偏系统.pdf
本发明公开了一种皮带智能纠偏系统,包括执行机构和控制系统,执行机构包括连接支架,外防护罩的内部一侧固定设有驱动电机,两个固定板之间转动连接有驱动螺杆,驱动螺杆的外侧中部套设有驱动滑块,两个固定板之间还穿插设有控位滑轨,接口滑块的顶部转动连接有接口触头,第一角型钢板的顶部固定设有第一托架,第一托架的顶部架设有皮带纠偏托辊,本发明的皮带智能纠偏系统,总结了大量皮带纠偏装置的应用经验,设计研发出一套结构合理、安装维护方便、可靠性高、智能型纠偏装置,能够就地自动检测皮带跑偏状态、根据跑偏程度自动控制调整纠偏轮,能

纠偏系统、起重机及纠偏方法.pdf
本发明提供了一种纠偏系统,在大车的两侧分别增加水平轮,并在水平轮与大车连接的转轴上设置有销轴传感器,检测水平轮与轨道间的作用力,根据受力情况判断出轨道变形或两侧大车行走不同步,通过处理模块给执行模块的变频器发送指令调节大车的速度,来进行纠偏;在两侧大车的从动轮上分别安装绝对值编码器,通过测得数据的比较,作为销轴传感器检测系统的保护系统。本发明还提供了一种起重机及一种纠偏方法。本发明提供的纠偏系统,能够实时检测或者判断出轨道的变形,并进行轨道变形预警或保护停车;动态调整大车的速度,使大车在变形的轨道上继续行

一种物品图案在线检测纠偏系统及其纠偏方法.pdf
本发明涉及一种物品图案在线检测纠偏系统及其纠偏方法。本发明的一种物品图案在线检测纠偏系统,包括控制器、图案检测器、伺服电机和差速器,图案检测器与控制器网络连接,控制器与伺服电机网络连接,伺服电机与驱动物品前进的驱动轮连接。其有益效果是:通过伺服电机改变驱动轮的转速自动调整物品图案的位置,使图案位置在物品上一直处于一个恒定位置,保证物品质量的均匀性。本发明的物品图案在线检测纠偏设备适用于预先在物品生产原料上印制图案,然后切割为单个物品的领域,例如烟支的生产、卫生纸的生产等领域。

一种轮胎吊机器视觉自动纠偏系统及纠偏方法.pdf
本发明涉及一种轮胎吊机器视觉自动纠偏系统及纠偏方法,采集模块在轮胎吊行进过程中获取规定线路的图像;标定模块获取标定参照物特征部位分别在像素坐标系和实际坐标系下的坐标;坐标转换模块实现像素坐标系与实际坐标系之间的转换;预处理模块对采集模块的图像进行处理以获得特征清晰稳定的数据,线路识别模块,通过对图像中规定线路检测识别,确定实际行驶过程中实际线路与规定线路的方向偏差Δα和距离偏差Δd,并发送给PLC通讯模块;PLC通讯模块存储上述数据并发送给轮胎吊控制系统进行纠偏。本发明利用机器视觉技术,实现对轮胎吊大车行