
零件装夹装置.pdf

纪阳****公主


1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

零件装夹装置.pdf
本发明属于夹具技术领域,尤其涉及一种零件装夹装置,包括固定架、支撑架、驱动件、定位管、推杆和夹紧块,支撑架和驱动件均安装于固定架上,定位管安装于支撑架上,推杆的第一端与驱动件的驱动端连接、第二端穿入定位管内,定位管的末端设有定位头,定位头上设有两端开口的安装槽,夹紧块设于安装槽内,夹紧块上设有由其第一端朝向其第二端延伸的弧形槽,弧形槽中穿设有两端分别与安装槽的相对两内壁连接的限位杆,夹紧块的第二端与推杆的第二端转动连接,夹紧块随推杆的伸缩运动而以弧形槽为导向运动且夹紧块的第一端的端面能够伸出安装槽的开口外
三维齿轮测量中心大规格零件定心装夹装置及装夹方法.pdf
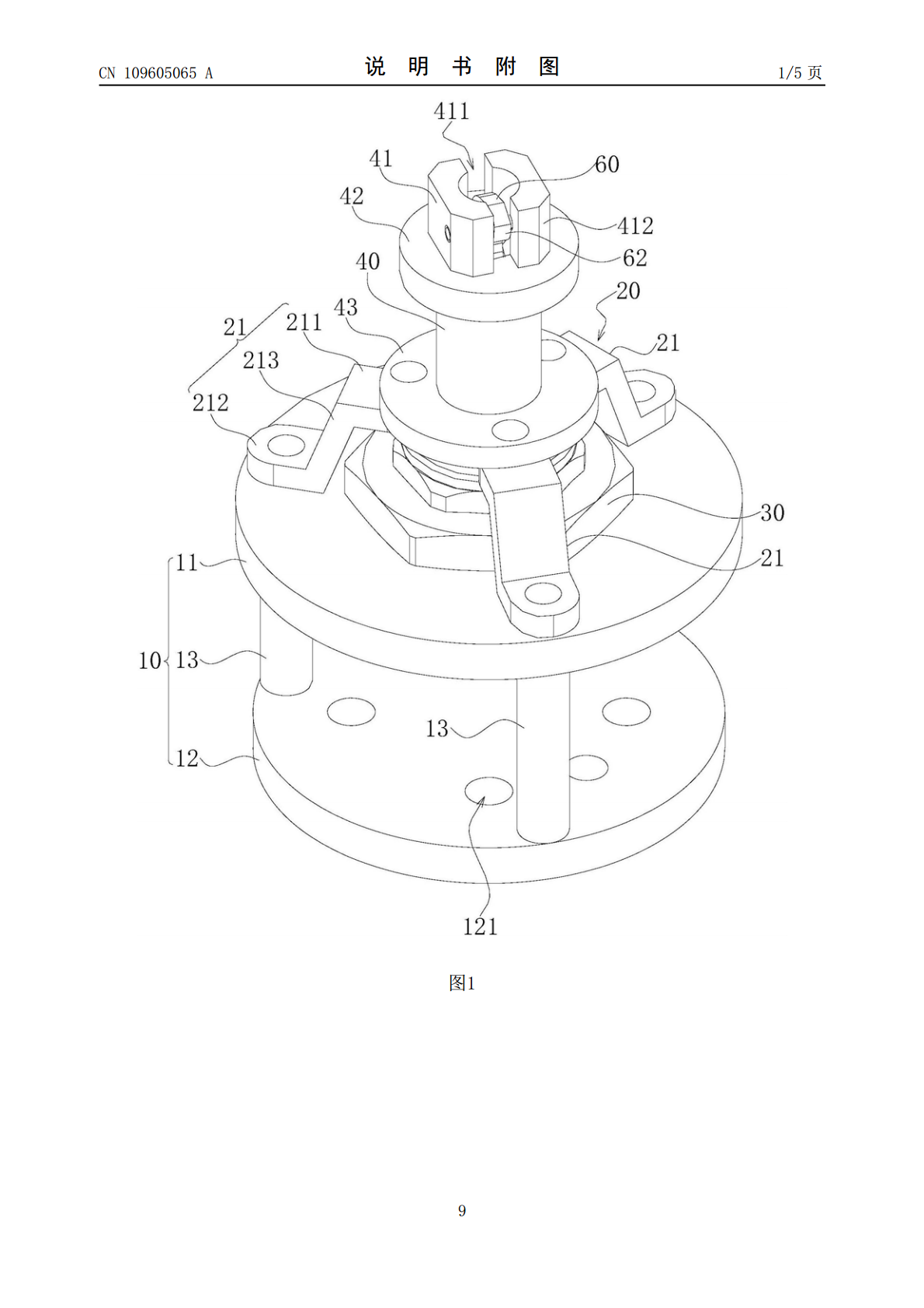
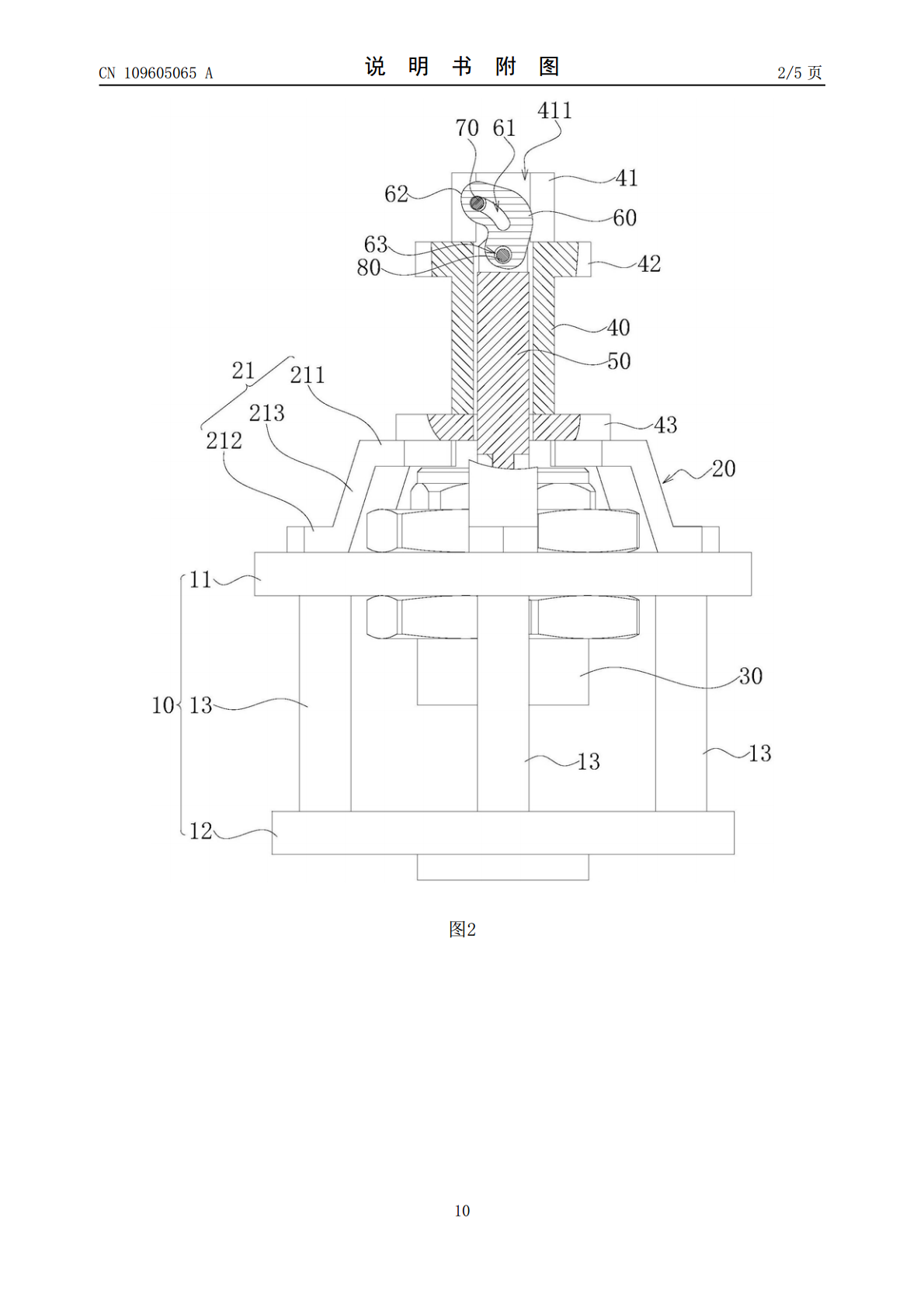
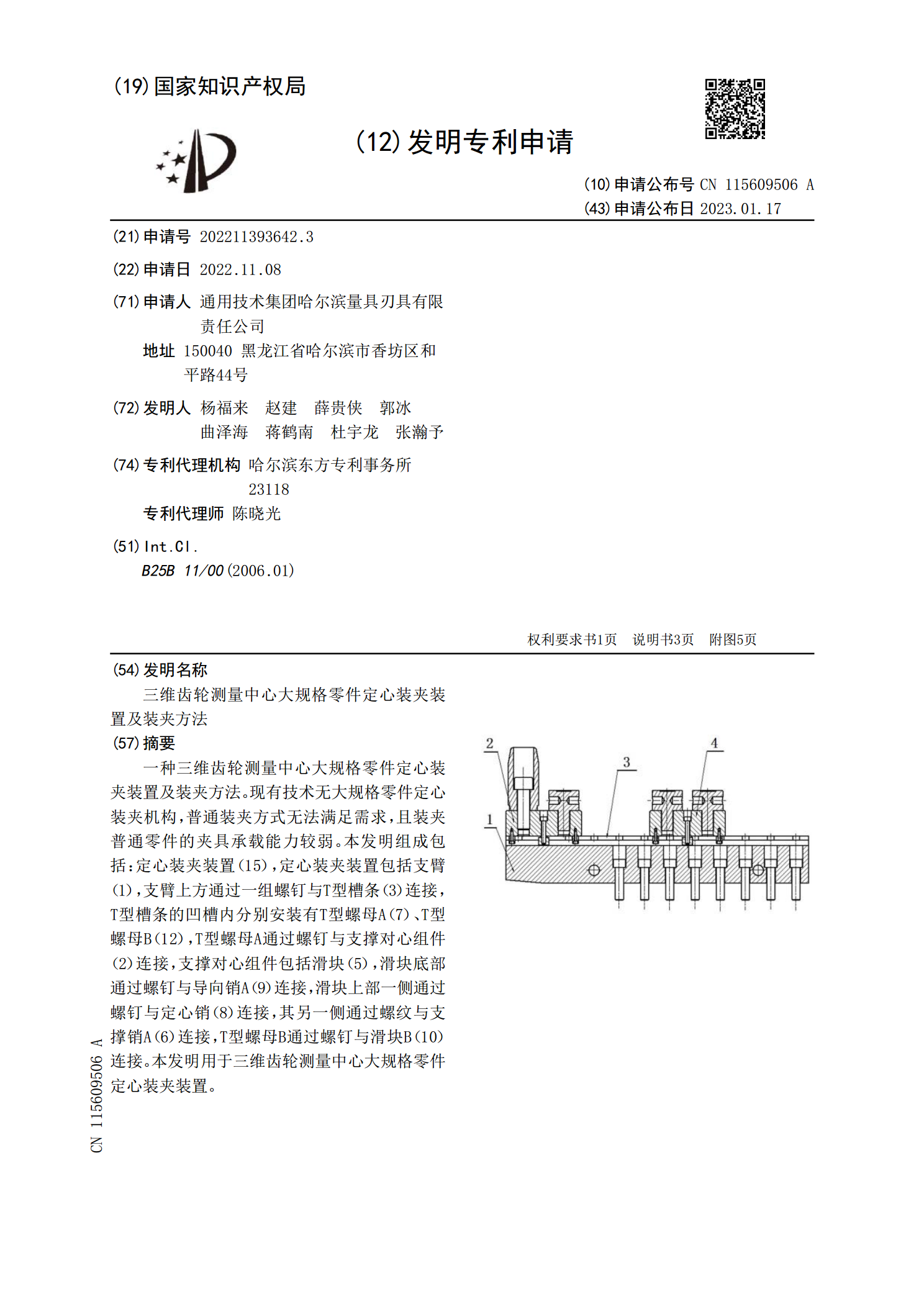
一种三维齿轮测量中心大规格零件定心装夹装置及装夹方法。现有技术无大规格零件定心装夹机构,普通装夹方式无法满足需求,且装夹普通零件的夹具承载能力较弱。本发明组成包括:定心装夹装置(15),定心装夹装置包括支臂(1),支臂上方通过一组螺钉与T型槽条(3)连接,T型槽条的凹槽内分别安装有T型螺母A(7)、T型螺母B(12),T型螺母A通过螺钉与支撑对心组件(2)连接,支撑对心组件包括滑块(5),滑块底部通过螺钉与导向销A(9)连接,滑块上部一侧通过螺钉与定心销(8)连接,其另一侧通过螺纹与支撑销A(6)连接,T

装夹装置.pdf
本发明提供的一种装夹装置包括:真空吸盘、布置在所述真空吸盘的工件放置表面的密封垫圈、用于固定所述真空吸盘上布置的工件的压板、附接在所述真空吸盘上的接头、与所述接头相连的压力开关、以及与所述压力开关相连的真空泵。所述压力开关与所述真空泵之间布置了过滤装置。装夹装置还包括作为能量传递部分的皮带轮和电动机。通过采用根据本发明的组合装夹装置可产生足够的综合吸附力,使零件牢牢的固定在夹具体上,使零件与夹具体接触部位各点受力均匀,保证加工后刚性较弱的中心区域紧贴工作台面,消除工件刚性较弱的中心区域在加工过程中向上翘曲

一种用于快速装夹零件的夹紧装置.pdf
一种用于快速装夹零件的夹紧装置,用于快速装夹零件后装入作业部件中,包括装夹底板、可拆卸固定在所述装夹底板上的夹紧组件、定位组件,所述夹紧组件固定连接在所述装夹底板上并夹持零件,所述装夹底板上设置有滑槽,所述定位组件可固定在所述滑槽中的任意位置用于对零件位置进行定位和调节,调整好所述定位组件后可以实现零件快速组装到所述夹紧组件的快捷操作。本发明利用定位销和扣爪快捷方便对夹紧组件进行固定,然后通过夹紧组件和定位组件快速对零件进行定位和装夹,最后将组装后的总组件快速装配到作业部件上进行替换,加快了作业的进度和效

轴类零件的装夹.pptx
教学目标:1、了解轴类工件的装夹方法2、了解中心孔的形状及作用3、掌握中心钻折断的原因及预防方法4、掌握两顶尖装夹时的注意事项教学重难点:1、根据加工需要选择正确的装夹方法2、掌握三爪自定心卡盘装夹工件的找正方法3、掌握四爪单动卡盘装夹工件的找正方法教学内容一、用三爪自定心卡盘装夹自定心卡盘的拆装三爪卡盘装夹工件的找正三爪卡盘装夹工件的找正二、用四爪单动卡盘装夹圆柱体在单动卡盘上的安装三、用两顶尖装夹顶尖拨盘和鸡心夹头中心孔中心孔中心孔中心孔中心钻折断的原因及预防用两顶尖装夹工件的注意事项四、用一夹一顶装