
水下传感节点的声学定位方法、装置、设备和介质.pdf

书生****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

水下传感节点的声学定位方法、装置、设备和介质.pdf
本申请提供一种水下传感节点的声学定位方法、装置、电子设备和存储介质。方法包括:计算信标发出的声信号到达水下传感节点的到达时刻,得到到达时刻估计向量;观测到达时刻,得到到达时刻观测向量;根据到达时刻估计向量和到达时刻观测向量,构建到达时刻目标函数;计算声信号到达水下传感节点的水平入射角,得到水平入射角估计向量;观测水平入射角,得到水平入射角观测向量;根据水平入射角估计向量和水平入射角观测向量,构建水平入射角目标函数;组合到达时刻目标函数和水平入射角目标函数,得到融合目标函数;根据融合目标函数,计算水下传感节

无线传感器节点定位的方法、装置、设备和存储介质.pdf
本申请提供一种无线传感器节点定位的方法、装置、设备和存储介质,包括:针对每一信标节点,根据传感器节点之间的距离,确定信标节点到每一其他传感器节点的最小跳数;并根据信标节点到其他信标节点的最小跳数和距离计算信标节点的平均跳距离;基于改进灰狼算法修正每个信标节点的平均跳距离;利用修正后的平均跳距离,信标节点到待定位节点的最小跳数,基于三维双曲线改进最小二乘法计算得到待定位节点的位置。本方案根据节点间的实际距离以及灰狼算法获得更精确的平均跳距离,并利用三维双曲线改进最小二乘法提高最后根据平均跳距离计算待定位节点

一种传感器网络节点的定位方法、装置、设备及存储介质.pdf
本发明公开了一种传感器网络节点的定位方法、装置、设备及存储介质。该方法包括确定待定位节点在待定位区域中的各参考节点,并获取待定位节点的目标接收信号强度集合与参考节点的目标接收信号强度集合;在待定位区域中,确定与待定位节点对应的AOA区域;根据待定位节点的目标接收信号强度集合与AOA区域中每个参考节点的目标接收信号强度集合计算待定位节点和AOA区域中每个参考节点之间的欧氏距离值;根据待定位节点和AOA区域中每个参考节点之间的欧氏距离值,获取待定位节点的位置数据。本发明实施例的技术方案极大的提高传感器网络节点
声学事件检测方法、装置、设备和存储介质.pdf
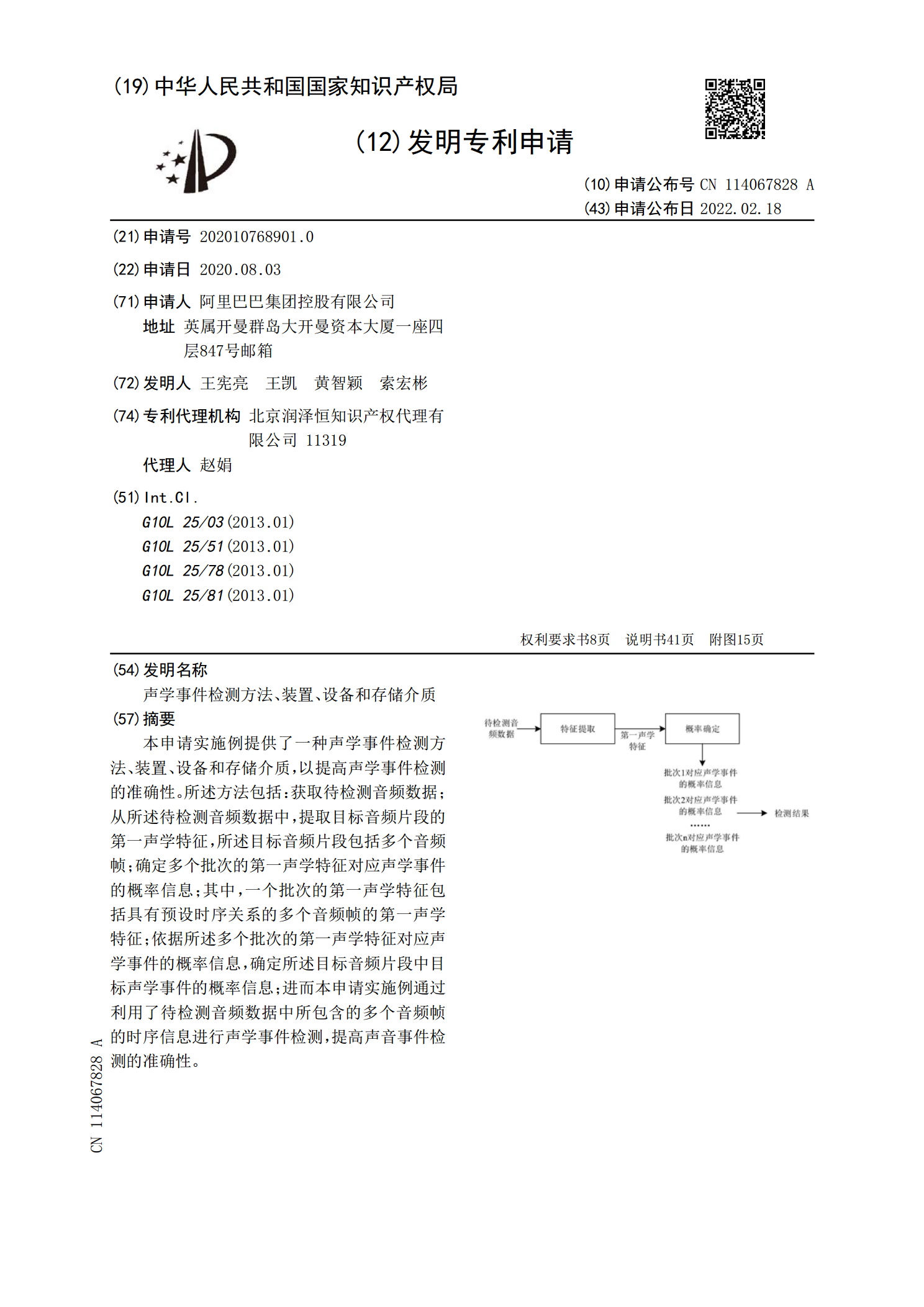
本申请实施例提供了一种声学事件检测方法、装置、设备和存储介质,以提高声学事件检测的准确性。所述方法包括:获取待检测音频数据;从所述待检测音频数据中,提取目标音频片段的第一声学特征,所述目标音频片段包括多个音频帧;确定多个批次的第一声学特征对应声学事件的概率信息;其中,一个批次的第一声学特征包括具有预设时序关系的多个音频帧的第一声学特征;依据所述多个批次的第一声学特征对应声学事件的概率信息,确定所述目标音频片段中目标声学事件的概率信息;进而本申请实施例通过利用了待检测音频数据中所包含的多个音频帧的时序信息进
节点的部署方法、装置、设备和存储介质.pdf
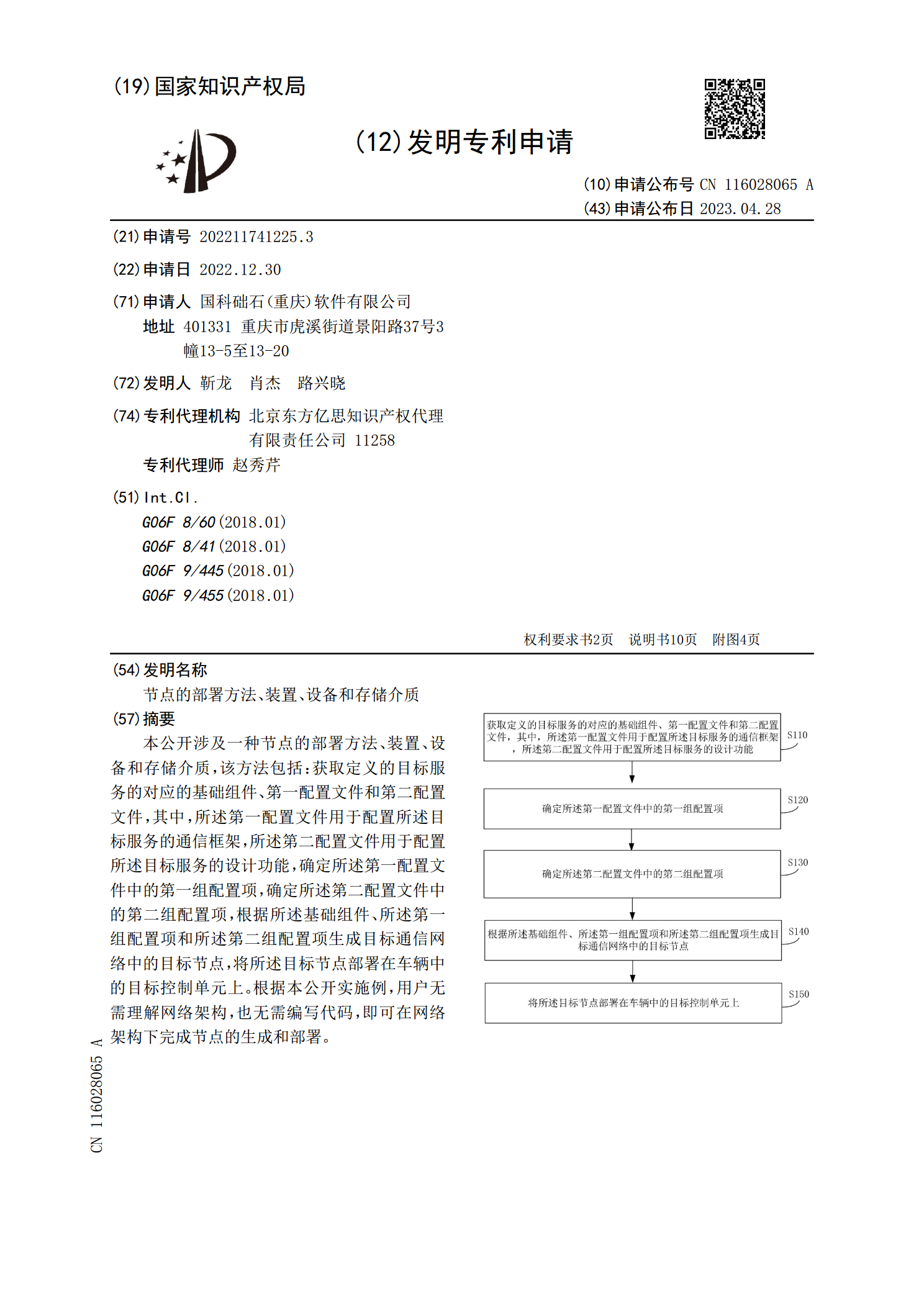
本公开涉及一种节点的部署方法、装置、设备和存储介质,该方法包括:获取定义的目标服务的对应的基础组件、第一配置文件和第二配置文件,其中,所述第一配置文件用于配置所述目标服务的通信框架,所述第二配置文件用于配置所述目标服务的设计功能,确定所述第一配置文件中的第一组配置项,确定所述第二配置文件中的第二组配置项,根据所述基础组件、所述第一组配置项和所述第二组配置项生成目标通信网络中的目标节点,将所述目标节点部署在车辆中的目标控制单元上。根据本公开实施例,用户无需理解网络架构,也无需编写代码,即可在网络架构下完成节