
单目红外热成像视觉机械手抓取物体姿态估计装置及方法.pdf

是你****岺呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
单目红外热成像视觉机械手抓取物体姿态估计装置及方法.pdf
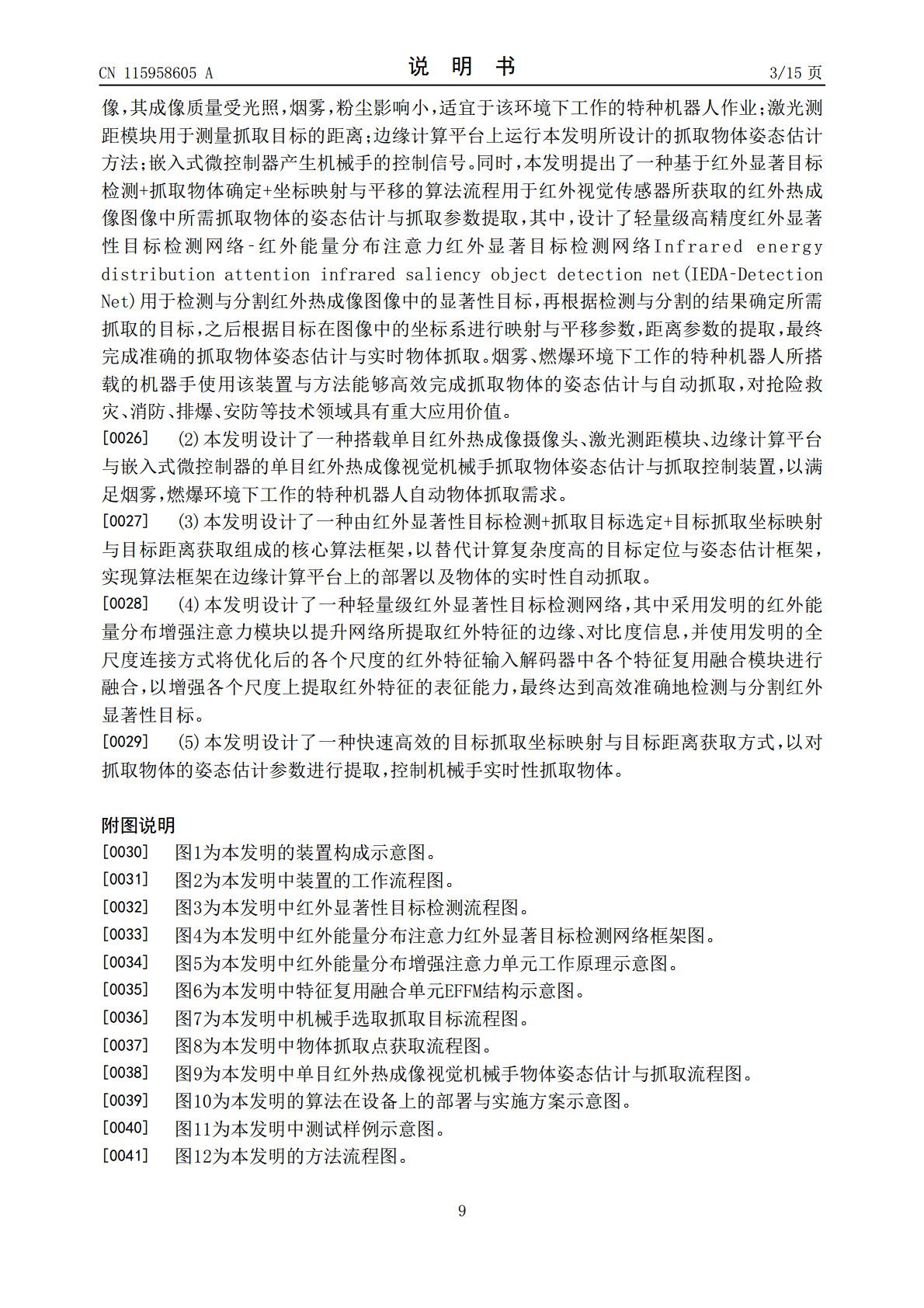
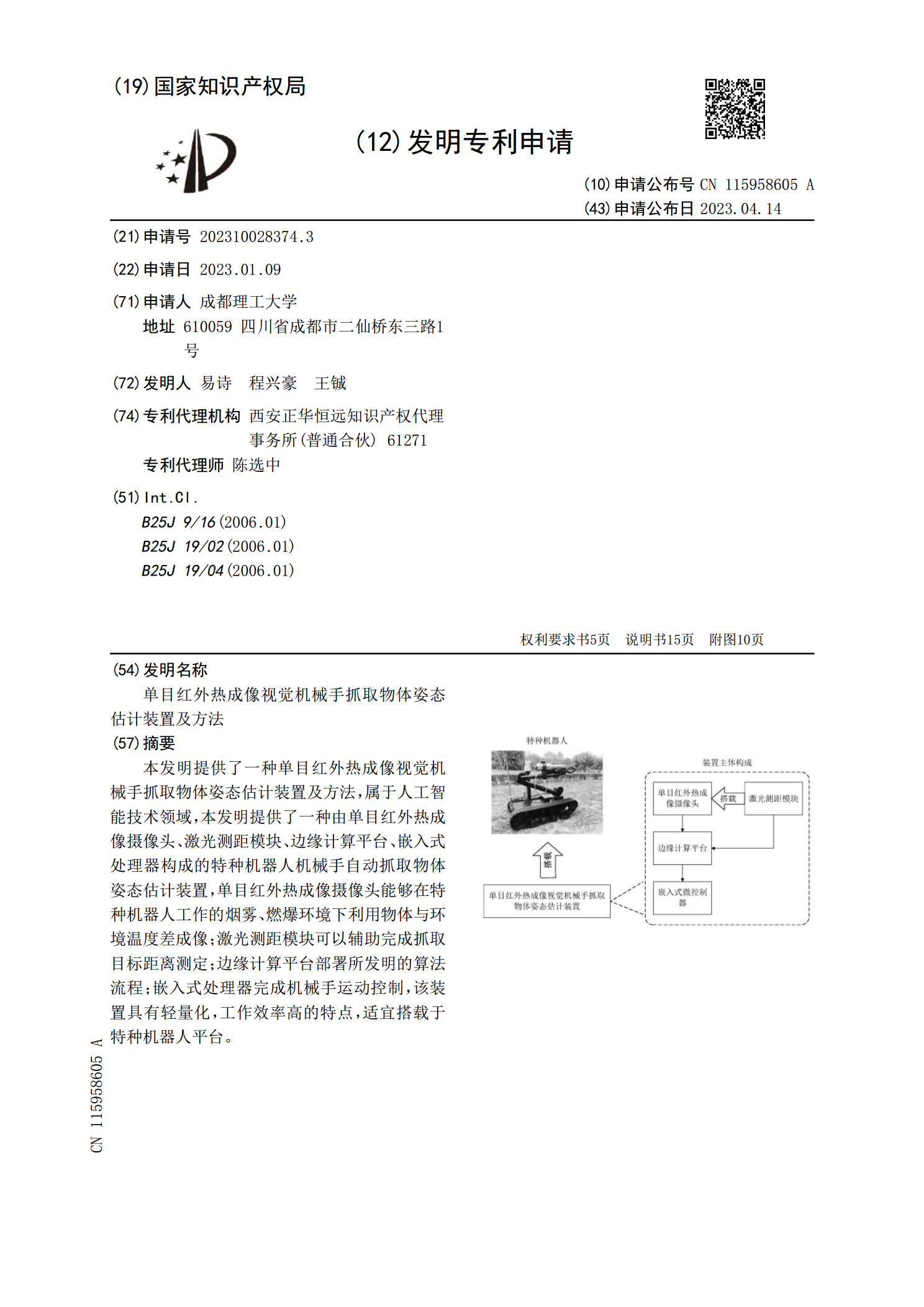
本发明提供了一种单目红外热成像视觉机械手抓取物体姿态估计装置及方法,属于人工智能技术领域,本发明提供了一种由单目红外热成像摄像头、激光测距模块、边缘计算平台、嵌入式处理器构成的特种机器人机械手自动抓取物体姿态估计装置,单目红外热成像摄像头能够在特种机器人工作的烟雾、燃爆环境下利用物体与环境温度差成像;激光测距模块可以辅助完成抓取目标距离测定;边缘计算平台部署所发明的算法流程;嵌入式处理器完成机械手运动控制,该装置具有轻量化,工作效率高的特点,适宜搭载于特种机器人平台。
基于单目六自由度物体姿态估计的机械臂拼装方法及装置.pdf
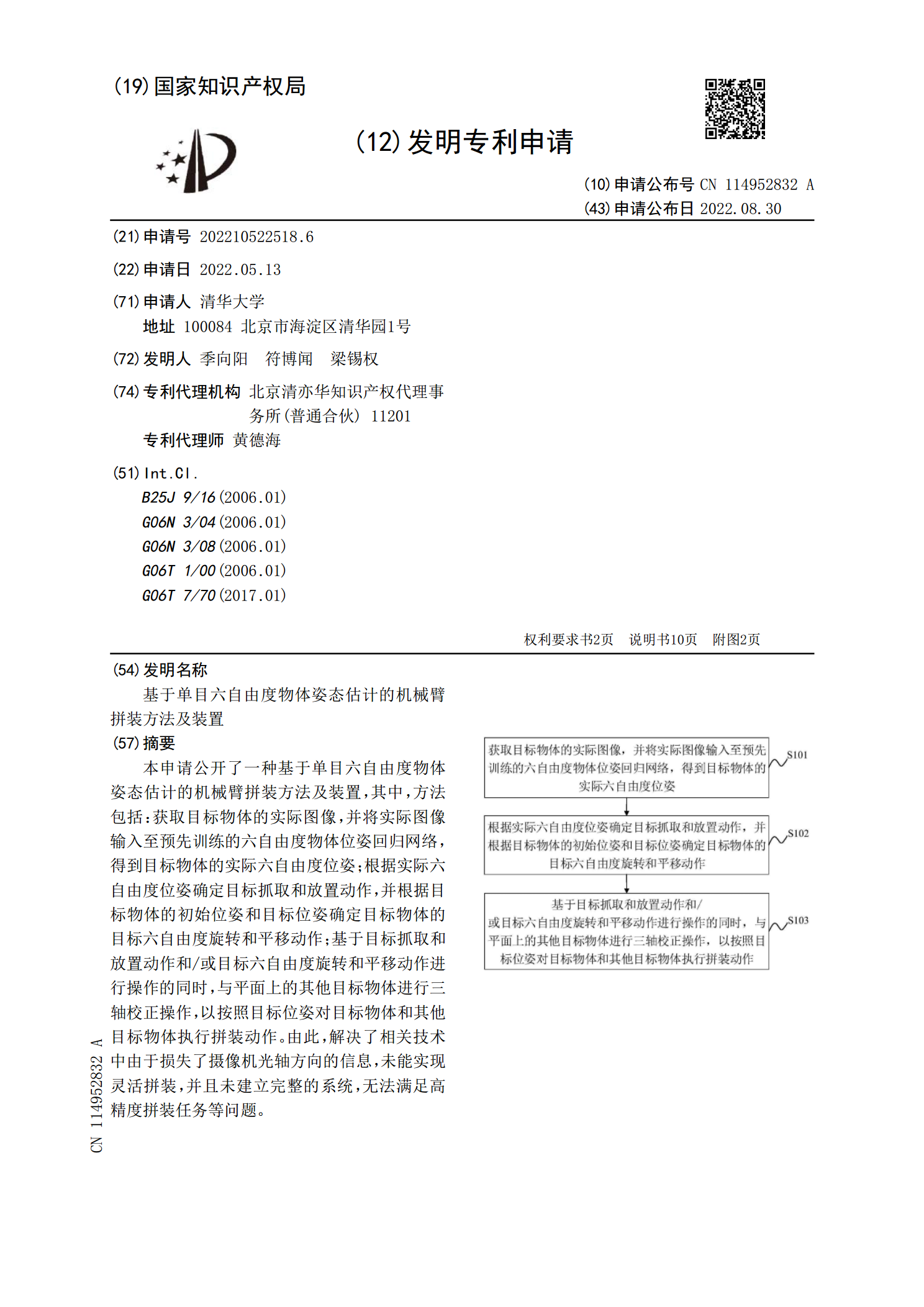
本申请公开了一种基于单目六自由度物体姿态估计的机械臂拼装方法及装置,其中,方法包括:获取目标物体的实际图像,并将实际图像输入至预先训练的六自由度物体位姿回归网络,得到目标物体的实际六自由度位姿;根据实际六自由度位姿确定目标抓取和放置动作,并根据目标物体的初始位姿和目标位姿确定目标物体的目标六自由度旋转和平移动作;基于目标抓取和放置动作和/或目标六自由度旋转和平移动作进行操作的同时,与平面上的其他目标物体进行三轴校正操作,以按照目标位姿对目标物体和其他目标物体执行拼装动作。由此,解决了相关技术中由于损失了摄

单目立体视觉测量系统位置姿态校准方法、装置、系统.pdf
本发明涉及视觉测量以及图像检测技术领域,提供一种单目立体视觉测量系统位置姿态校准方法、装置、系统。校准方法包括:单目立体视觉测量系统包括一台相机,该相机运动至2个以上运动位置拍摄被测目标;2个以上运动位置包括:基准运动位置和相对运动位置;向被测目标投射3个以上亮点;该相机运动至2各个以上运动位置,分别拍摄带有3个以上亮点的被测目标图像,提取被测目标图像中的像点,分别将像点进行同名像点匹配;计算相机在各个运动位置拍摄的像点的归一化图像坐标;根据同名像点以及各个运动位置拍摄的像点的归一化图像坐标分别求解出相机
表壳正反姿态判断的单目机器视觉方法.pptx
,目录PartOnePartTwo背景介绍姿态判断的意义姿态判断的应用场景PartThree单目机器视觉原理表壳正反姿态判断的难点姿态判断的精度要求PartFour图像采集图像预处理表壳特征提取正反姿态判断算法姿态判断结果输出PartFive实验数据来源与处理实验结果展示结果分析误差来源与改进方向PartSix研究结论研究不足与展望THANKS
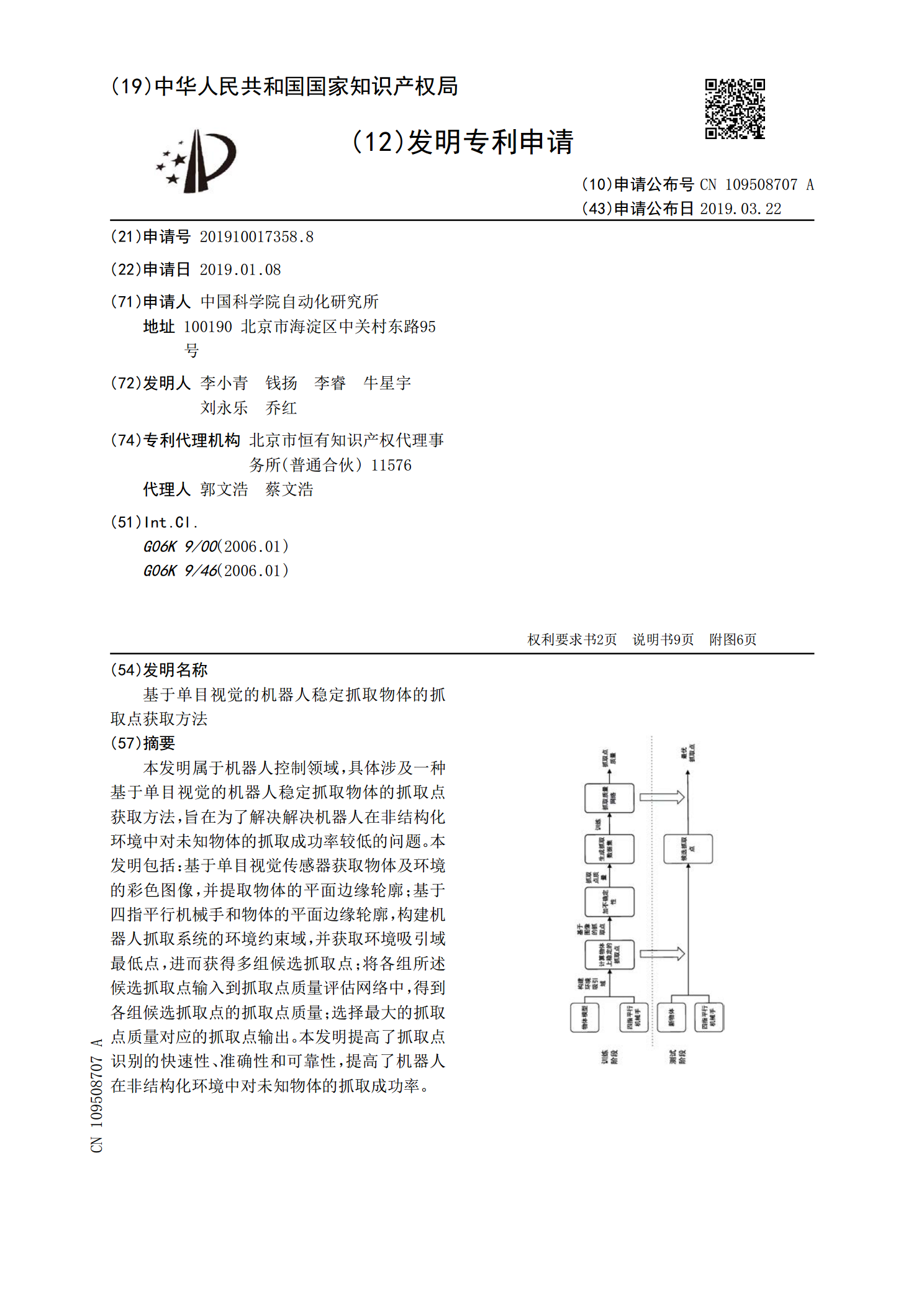
基于单目视觉的机器人稳定抓取物体的抓取点获取方法.pdf
本发明属于机器人控制领域,具体涉及一种基于单目视觉的机器人稳定抓取物体的抓取点获取方法,旨在为了解决解决机器人在非结构化环境中对未知物体的抓取成功率较低的问题。本发明包括:基于单目视觉传感器获取物体及环境的彩色图像,并提取物体的平面边缘轮廓;基于四指平行机械手和物体的平面边缘轮廓,构建机器人抓取系统的环境约束域,并获取环境吸引域最低点,进而获得多组候选抓取点;将各组所述候选抓取点输入到抓取点质量评估网络中,得到各组候选抓取点的抓取点质量;选择最大的抓取点质量对应的抓取点输出。本发明提高了抓取点识别的快速性