
双臂苹果采摘分级收集机器人圆形果实传输分级收集系统.pdf

努力****承悦

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
双臂苹果采摘分级收集机器人圆形果实传输分级收集系统.pdf
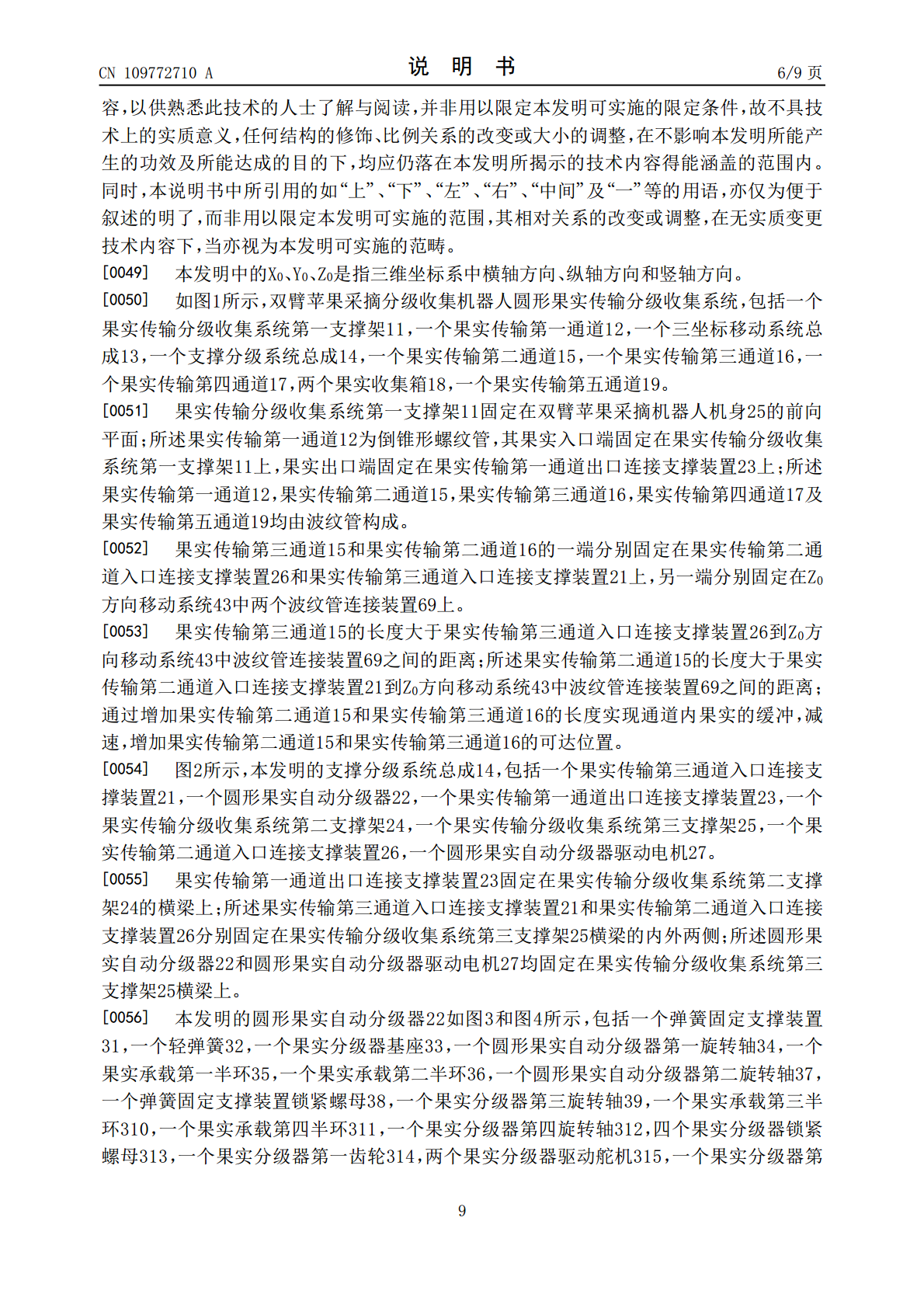
本发明公开了一种双臂苹果采摘分级收集机器人圆形果实传输分级收集系统,包括由上下两部分组成的果实传输通道,上下两部分之间设置与其相对应的圆形果实自动分级器,圆形果实自动分级器安装于支撑装置上,下部分果实传输通道的中间安装于三坐标移动系统总成上,果实传输通道的末端延伸至果实收集箱内,果实收集箱对应设置于三坐标移动系统总成的门式框架下方。支撑装置包括第一通道出口连接支撑环、第二通道入口连接支撑环、第三通道入口连接支撑环,用于安装上下果实传输通道的第一、第二和第三支撑架,以及安装于三坐标移动系统总成上的第四和第五

苹果采摘机器人在线分级系统研究.docx
苹果采摘机器人在线分级系统研究苹果采摘机器人在线分级系统研究摘要:随着农业产业的现代化和社会的发展,农田的机械化已成为现代农业的重要组成部分。苹果采摘机器人的出现,极大地提高了苹果采摘的效率和质量。然而,在大规模生产和复杂的环境条件下,传统的苹果采摘机器人面临许多挑战,如准确判断成熟度和避免伤害果实等。因此,本论文旨在研究苹果采摘机器人在线分级系统,以实现精确的苹果采摘和分类。第一章:引言1.1研究背景1.2研究目的1.3研究意义第二章:苹果采摘机器人概述2.1机器人的定义和分类2.2苹果采摘机器人的发展

苹果采摘机器人在线分级系统研究的任务书.docx
苹果采摘机器人在线分级系统研究的任务书任务书题目:苹果采摘机器人在线分级系统研究任务背景:随着科技的不断发展,现代农业中越来越多的机器人开始发挥作用,提高了农业生产的效率和质量。其中,苹果采摘机器人是目前应用较广泛的一种机器人。苹果的品质关系到果农的收益和市场销售,所以如何对苹果进行在线分级是一个值得研究的问题。任务目标:本次研究的目标是针对苹果采摘机器人在线分级系统的设计与实现进行研究,开发一套稳定可靠的在线分级系统。该系统能够快速高效地识别苹果的品质,并通过机器视觉处理、自动控制等技术手段实现自动采摘
一种茶叶采摘分级收集车.pdf
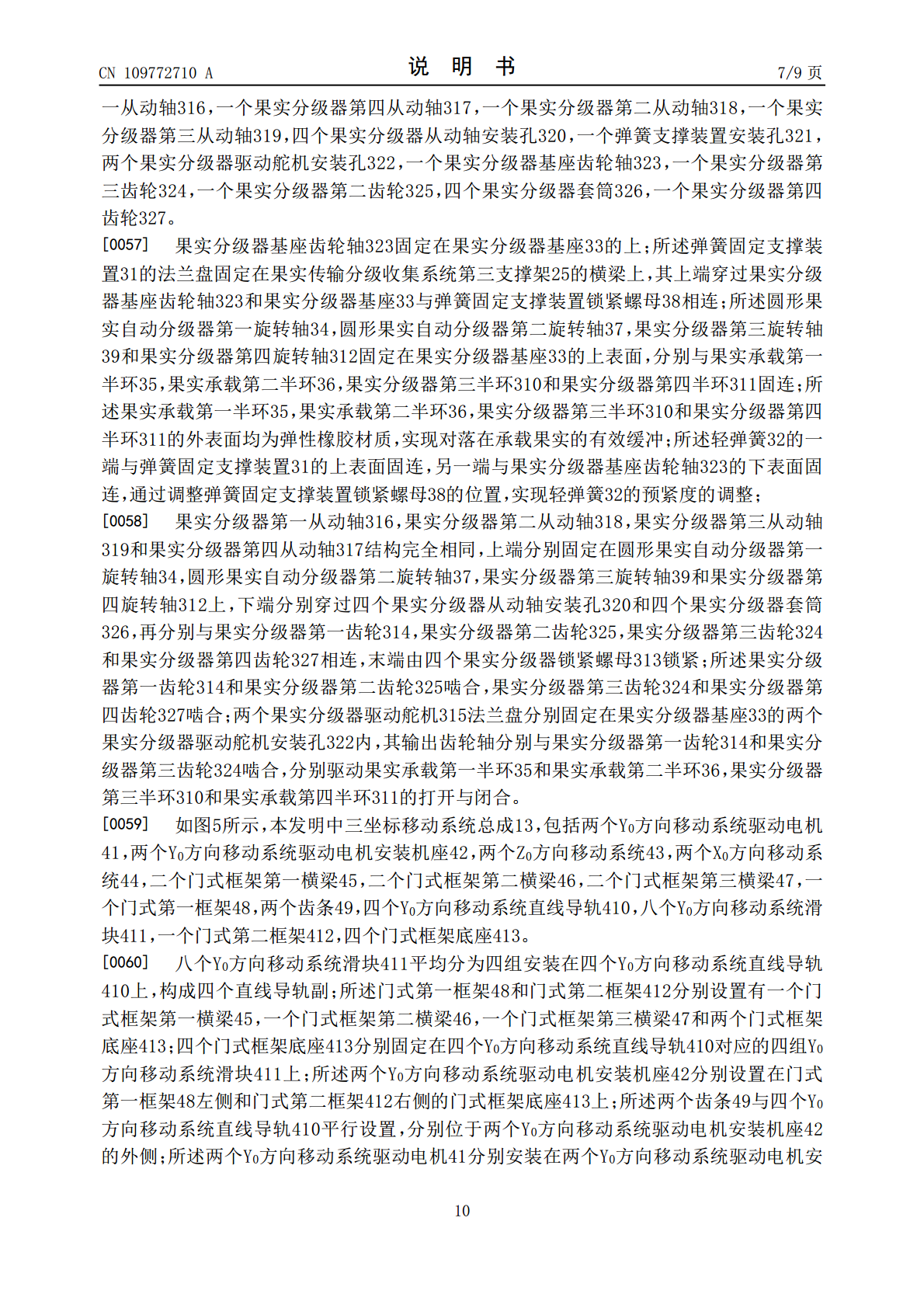
本发明涉及一种茶叶采摘分级收集车,特点为;车体包括车箱,车箱内经隔板分为前后两个腔室,车箱下部对应于前腔室插装有茶叶储存盒;调整机构安装于车箱前侧壁上,包括水平运动滑台、滑台左右移动驱动机构和滑台上下移动驱动机构;采摘支架平台与水平运动滑台固连;采摘机构悬空安装于采摘支架平台上;采摘机构采用循环运行的采摘内外网配合结构;在采摘内外网的内部设有收集盒,收集盒靠近车体的一端设有出料通孔;茶叶分级机构设置于车箱前腔室内,驱动传动机构设置于车箱后腔室内;收集输送机构安装于车顶上前端部,其将收集盒内的茶芽均匀输送至
分级加压式雨水收集灌溉系统.pdf
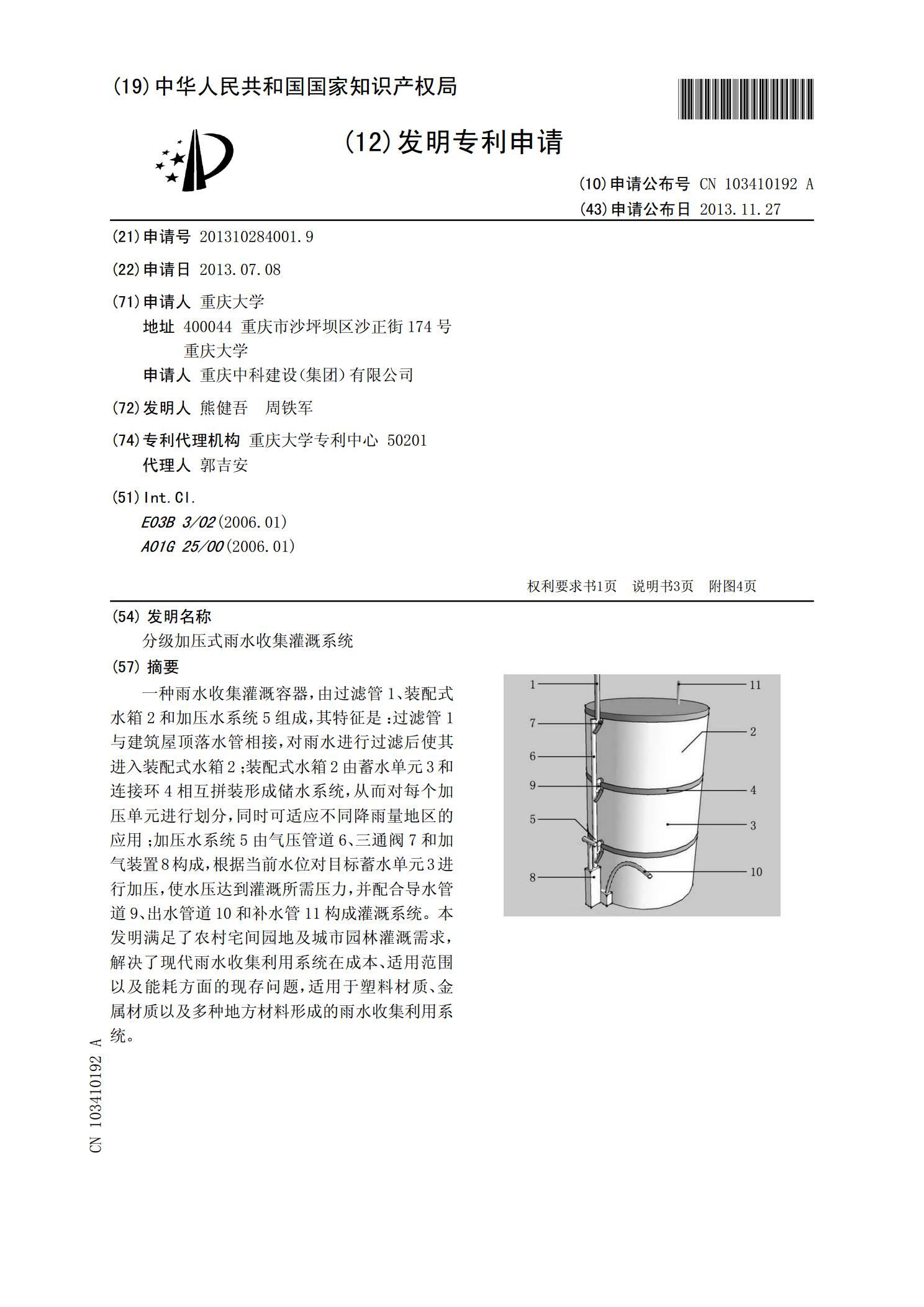
一种雨水收集灌溉容器,由过滤管1、装配式水箱2和加压水系统5组成,其特征是:过滤管1与建筑屋顶落水管相接,对雨水进行过滤后使其进入装配式水箱2;装配式水箱2由蓄水单元3和连接环4相互拼装形成储水系统,从而对每个加压单元进行划分,同时可适应不同降雨量地区的应用;加压水系统5由气压管道6、三通阀7和加气装置8构成,根据当前水位对目标蓄水单元3进行加压,使水压达到灌溉所需压力,并配合导水管道9、出水管道10和补水管11构成灌溉系统。本发明满足了农村宅间园地及城市园林灌溉需求,解决了现代雨水收集利用系统在成本、适