
骨科手术机器人底座.pdf

映雁****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
骨科手术机器人底座.pdf
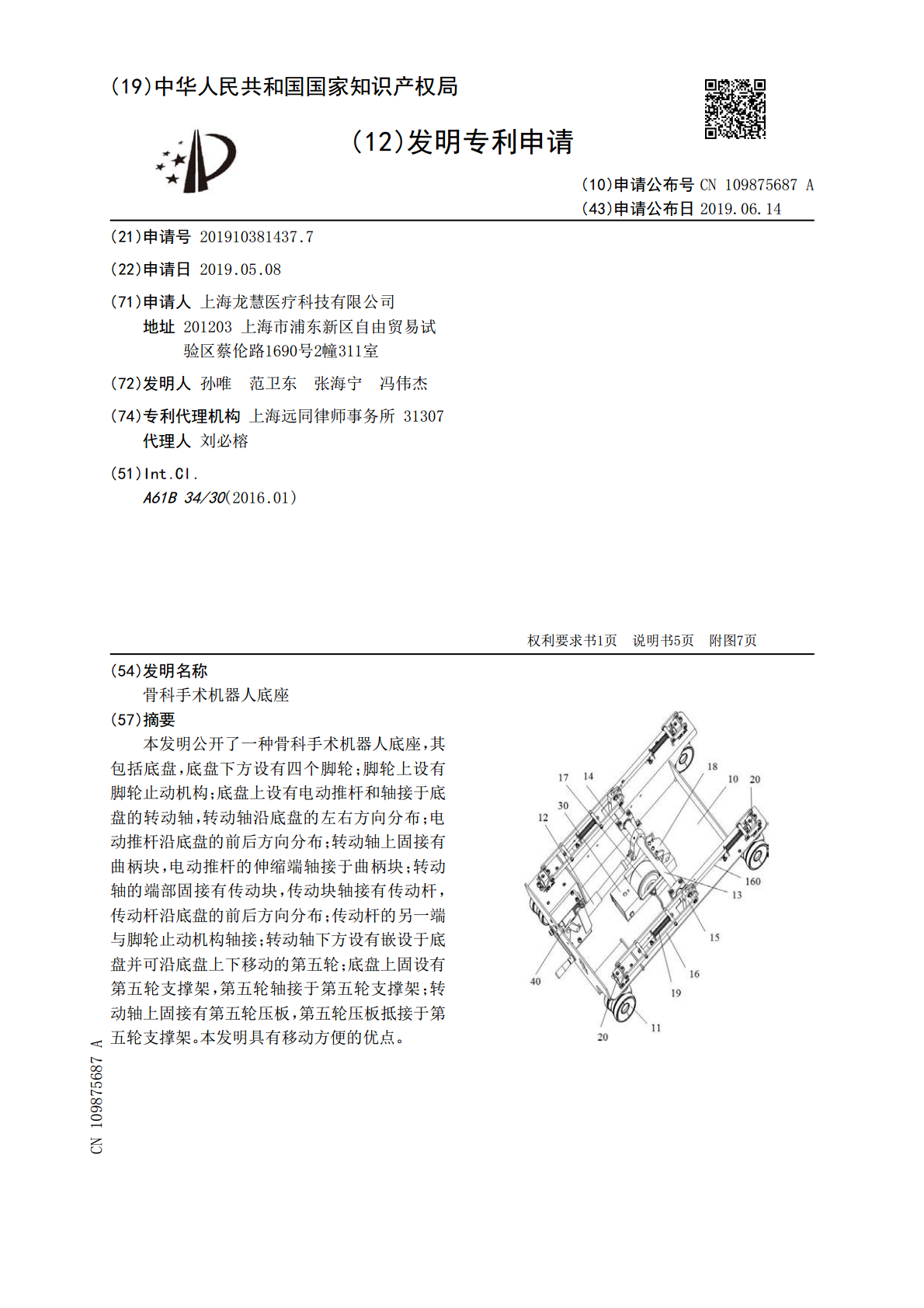
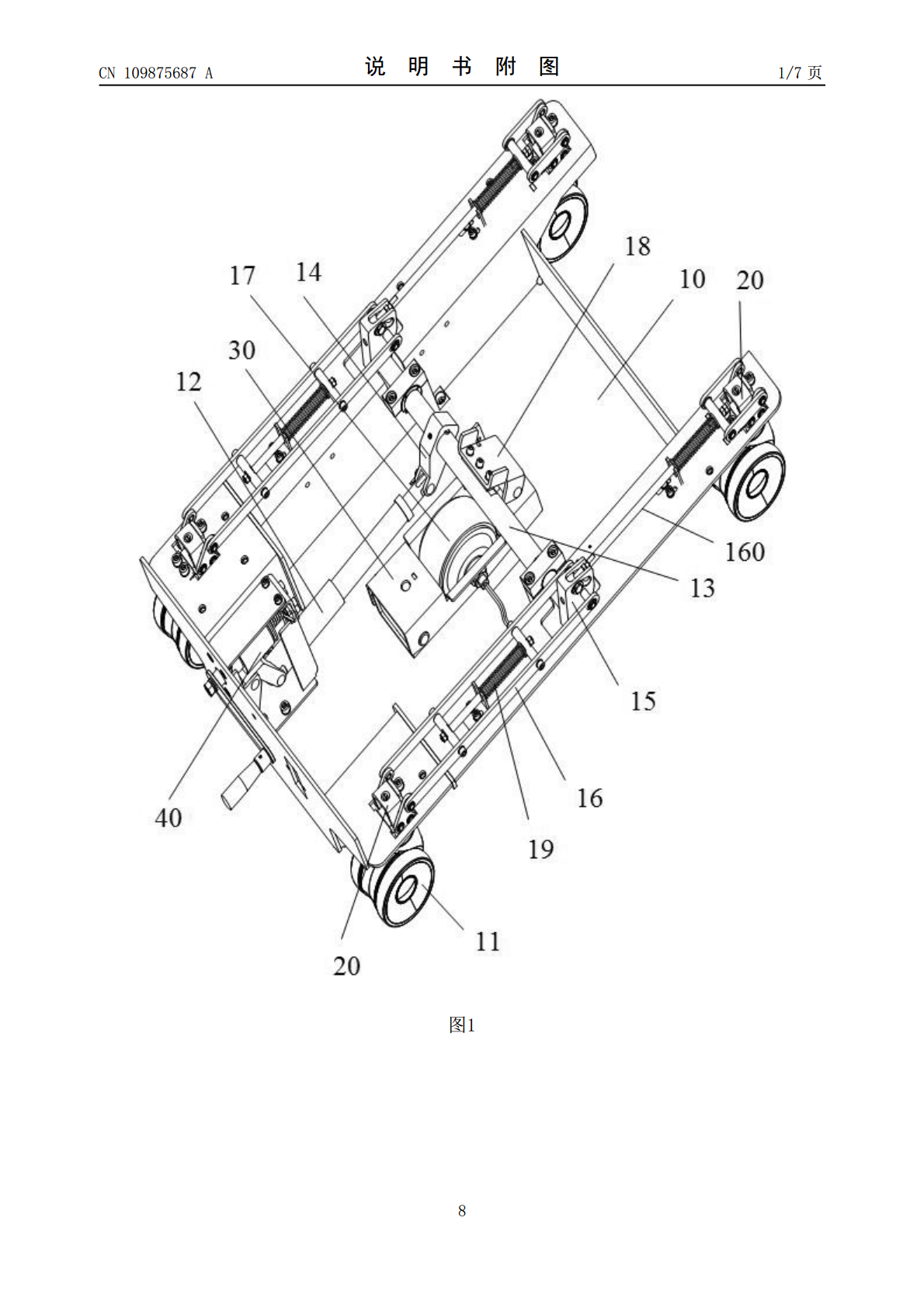
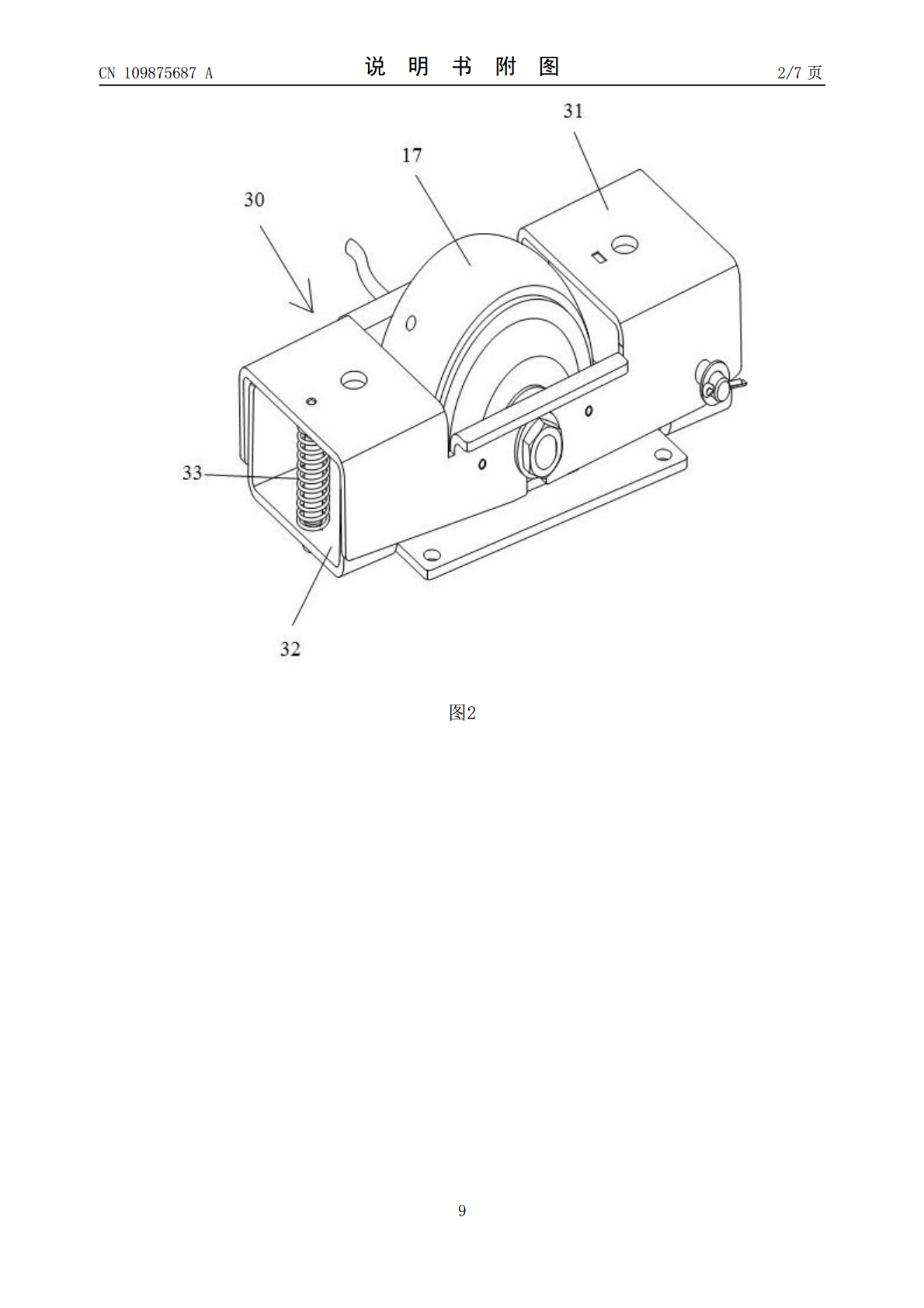
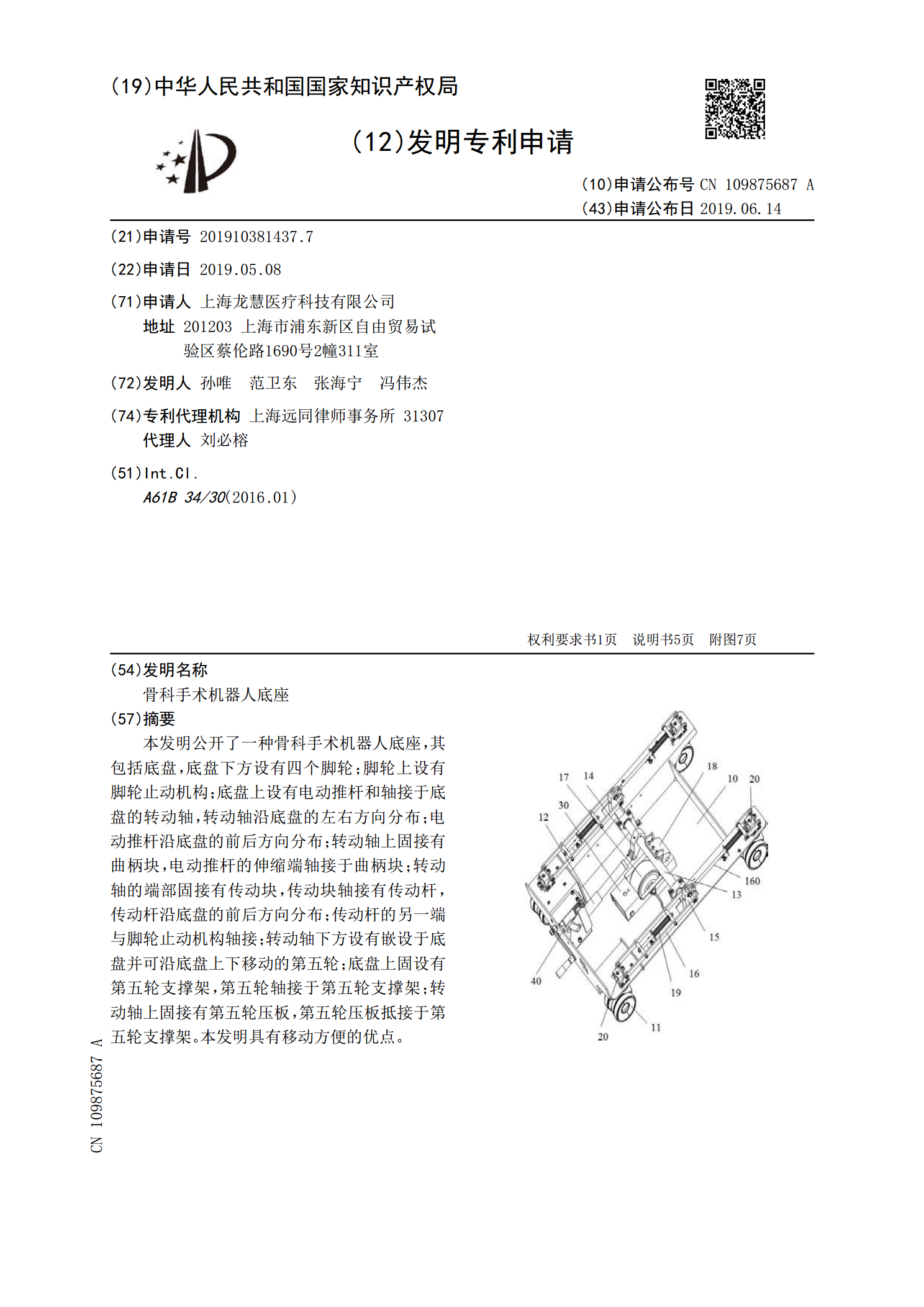
本发明公开了一种骨科手术机器人底座,其包括底盘,底盘下方设有四个脚轮;脚轮上设有脚轮止动机构;底盘上设有电动推杆和轴接于底盘的转动轴,转动轴沿底盘的左右方向分布;电动推杆沿底盘的前后方向分布;转动轴上固接有曲柄块,电动推杆的伸缩端轴接于曲柄块;转动轴的端部固接有传动块,传动块轴接有传动杆,传动杆沿底盘的前后方向分布;传动杆的另一端与脚轮止动机构轴接;转动轴下方设有嵌设于底盘并可沿底盘上下移动的第五轮;底盘上固设有第五轮支撑架,第五轮轴接于第五轮支撑架;转动轴上固接有第五轮压板,第五轮压板抵接于第五轮支撑架
一种骨科手术专用机器人底座.pdf
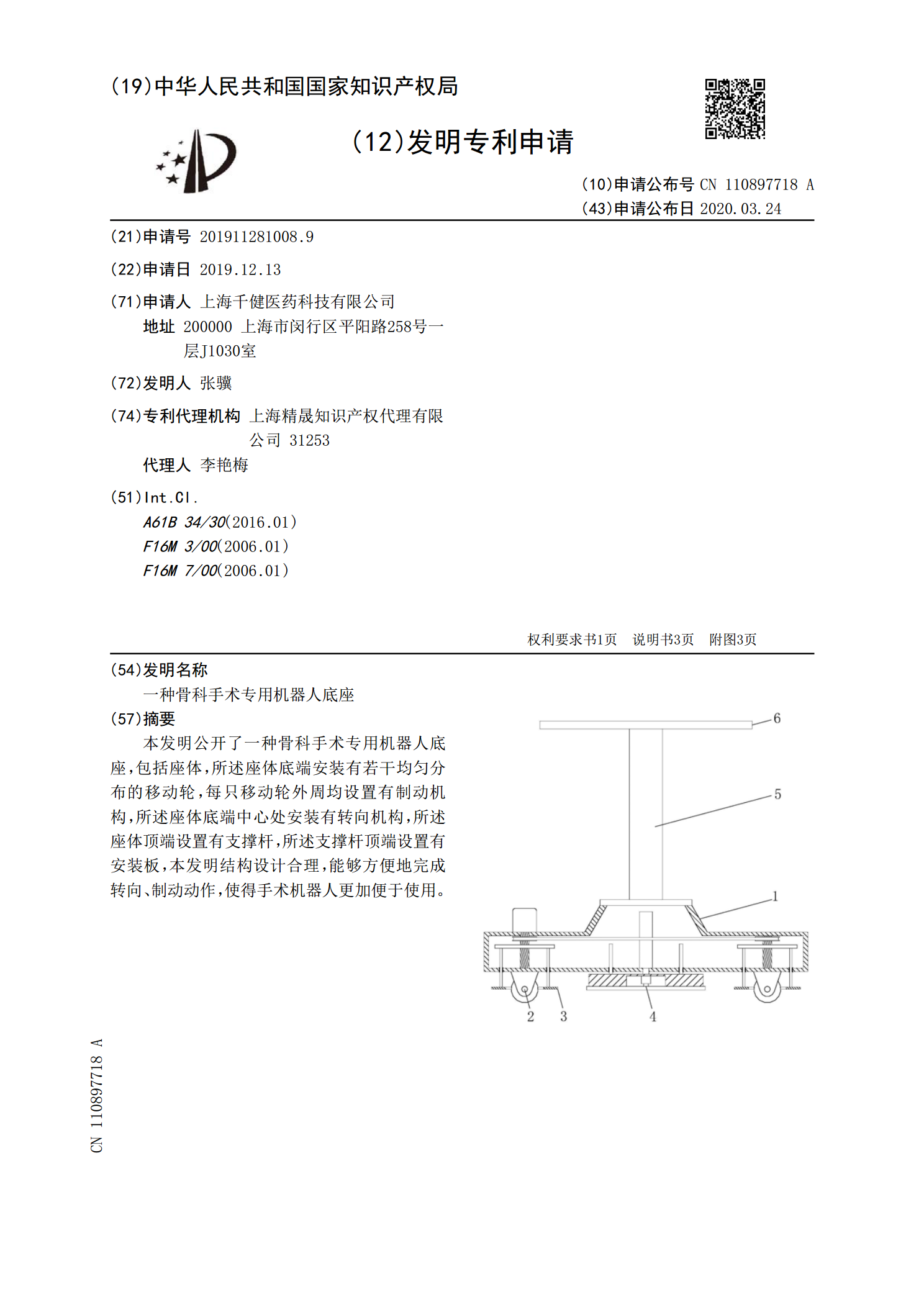
本发明公开了一种骨科手术专用机器人底座,包括座体,所述座体底端安装有若干均匀分布的移动轮,每只移动轮外周均设置有制动机构,所述座体底端中心处安装有转向机构,所述座体顶端设置有支撑杆,所述支撑杆顶端设置有安装板,本发明结构设计合理,能够方便地完成转向、制动动作,使得手术机器人更加便于使用。
骨科手术机器人.ppt
骨科手术机器人.ppt
引言先进机器人技术在医疗外科手术规划模拟、微损伤精确定位操作、无损伤诊断与检测、新型手术医学治疗方法等方面得到了广泛的应用,这不仅促进了传统医学的革命,也带动了新技术、新理论的发展。手术机器人构型针对上述要求,对于医疗外科机器人手臂,可以总结出设计的一般要求是:1)易于实现高的定位精度;2)运动直观性强,易于医生进行人机交互;3)在相同结构尺寸下,工作空间尽量大;4)在达到相同工作空间的条件下,手臂本体占据空间小;为了达到空间一定范围内的任意位置,机器人手臂至少要求有三个自由度。并且根据上述要求我们选择串
骨科手术机器人.ppt
引言先进机器人技术在医疗外科手术规划模拟、微损伤精确定位操作、无损伤诊断与检测、新型手术医学治疗方法等方面得到了广泛的应用,这不仅促进了传统医学的革命,也带动了新技术、新理论的发展。手术机器人构型针对上述要求,对于医疗外科机器人手臂,可以总结出设计的一般要求是:1)易于实现高的定位精度;2)运动直观性强,易于医生进行人机交互;3)在相同结构尺寸下,工作空间尽量大;4)在达到相同工作空间的条件下,手臂本体占据空间小;为了达到空间一定范围内的任意位置,机器人手臂至少要求有三个自由度。并且根据上述要求我们选择串