
管道爬行机器人.pdf

玉军****la


1/10

2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
管道爬行机器人.pdf
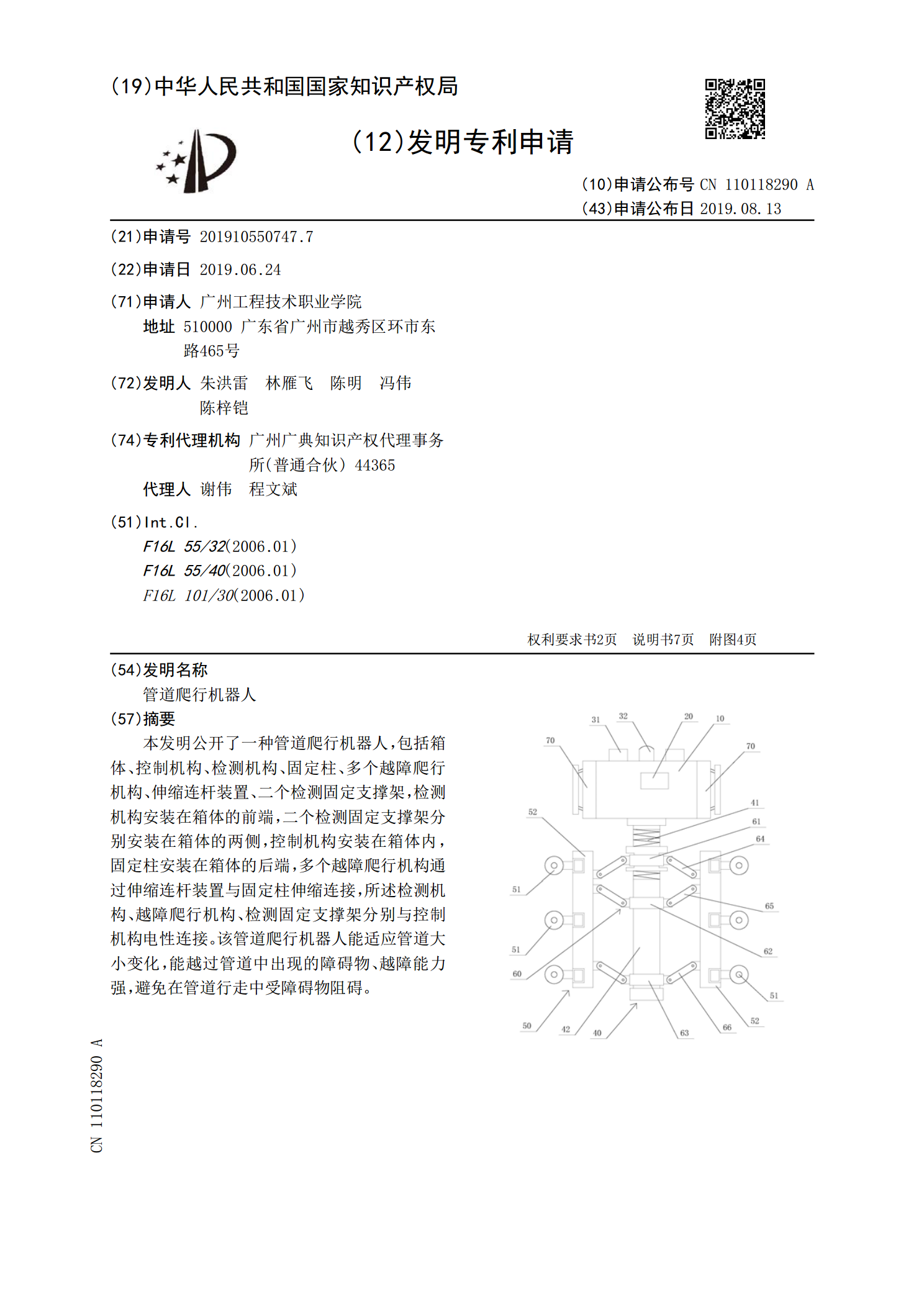
本发明公开了一种管道爬行机器人,包括箱体、控制机构、检测机构、固定柱、多个越障爬行机构、伸缩连杆装置、二个检测固定支撑架,检测机构安装在箱体的前端,二个检测固定支撑架分别安装在箱体的两侧,控制机构安装在箱体内,固定柱安装在箱体的后端,多个越障爬行机构通过伸缩连杆装置与固定柱伸缩连接,所述检测机构、越障爬行机构、检测固定支撑架分别与控制机构电性连接。该管道爬行机器人能适应管道大小变化,能越过管道中出现的障碍物、越障能力强,避免在管道行走中受障碍物阻碍。
管道柔性爬行机器人.pdf
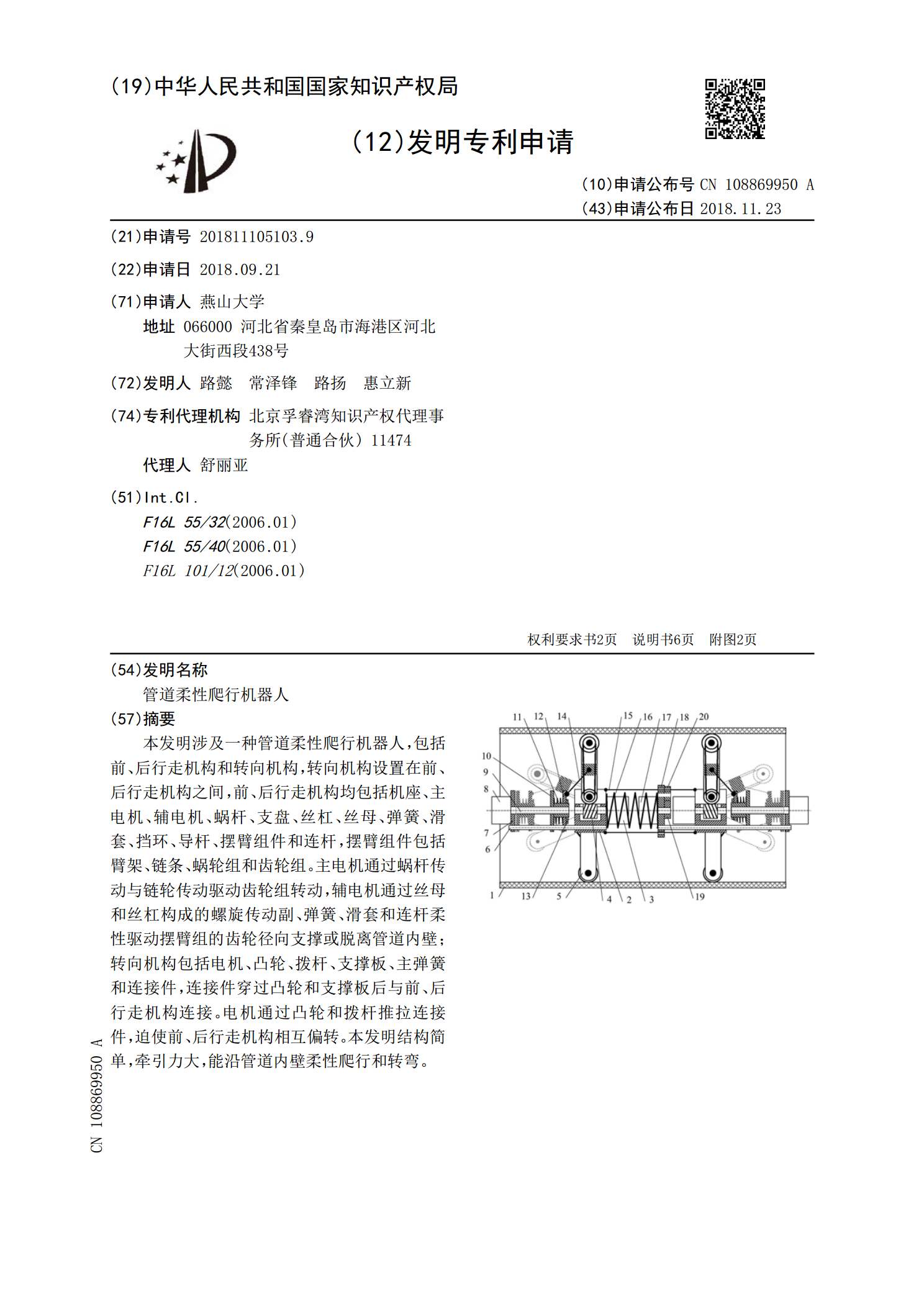
本发明涉及一种管道柔性爬行机器人,包括前、后行走机构和转向机构,转向机构设置在前、后行走机构之间,前、后行走机构均包括机座、主电机、辅电机、蜗杆、支盘、丝杠、丝母、弹簧、滑套、挡环、导杆、摆臂组件和连杆,摆臂组件包括臂架、链条、蜗轮组和齿轮组。主电机通过蜗杆传动与链轮传动驱动齿轮组转动,辅电机通过丝母和丝杠构成的螺旋传动副、弹簧、滑套和连杆柔性驱动摆臂组的齿轮径向支撑或脱离管道内壁;转向机构包括电机、凸轮、拨杆、支撑板、主弹簧和连接件,连接件穿过凸轮和支撑板后与前、后行走机构连接。电机通过凸轮和拨杆推拉连
一种管道爬行机器人及其爬行方法.pdf
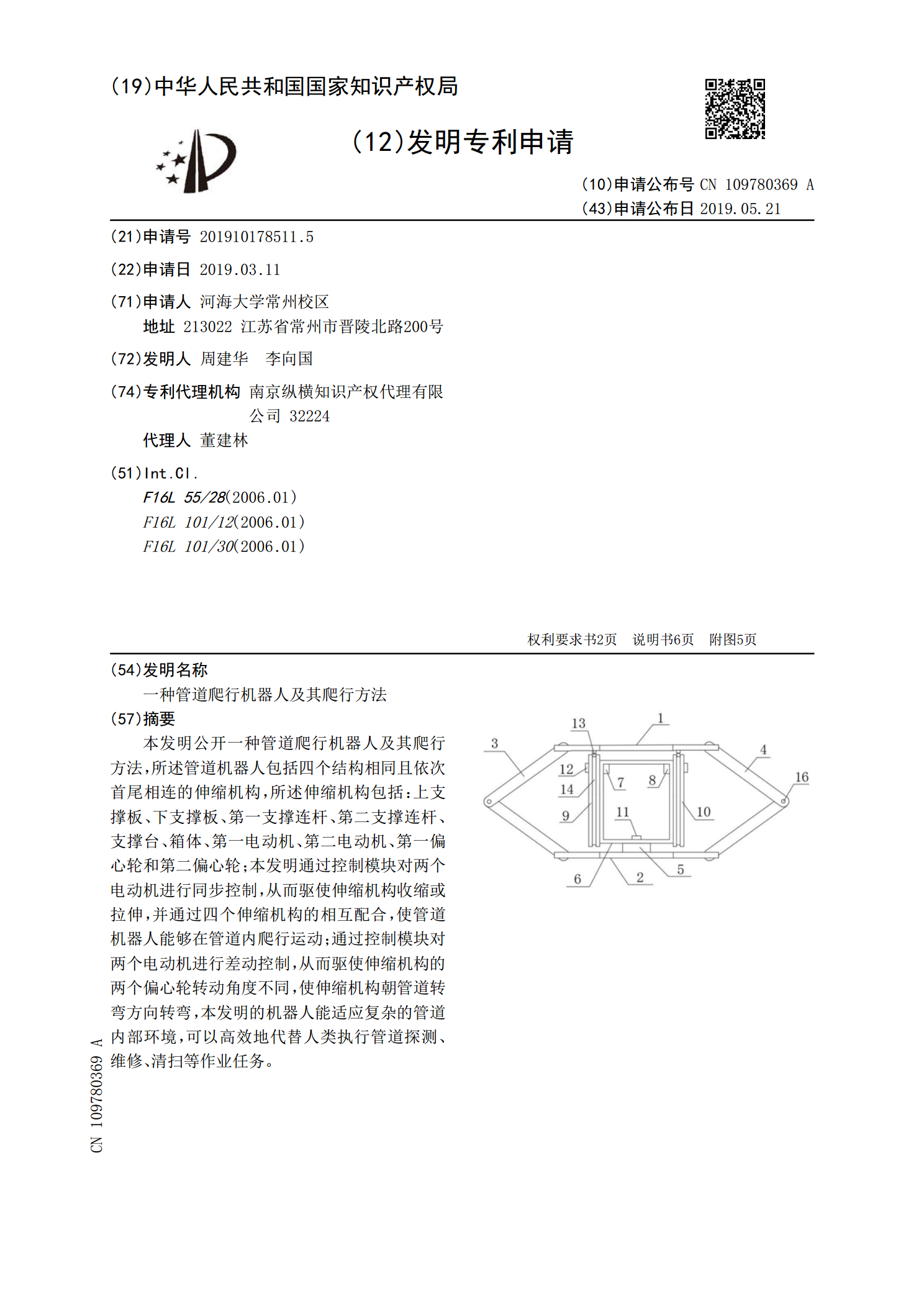
本发明公开一种管道爬行机器人及其爬行方法,所述管道机器人包括四个结构相同且依次首尾相连的伸缩机构,所述伸缩机构包括:上支撑板、下支撑板、第一支撑连杆、第二支撑连杆、支撑台、箱体、第一电动机、第二电动机、第一偏心轮和第二偏心轮;本发明通过控制模块对两个电动机进行同步控制,从而驱使伸缩机构收缩或拉伸,并通过四个伸缩机构的相互配合,使管道机器人能够在管道内爬行运动;通过控制模块对两个电动机进行差动控制,从而驱使伸缩机构的两个偏心轮转动角度不同,使伸缩机构朝管道转弯方向转弯,本发明的机器人能适应复杂的管道内部环境
四驱动管道柔性爬行机器人.pdf
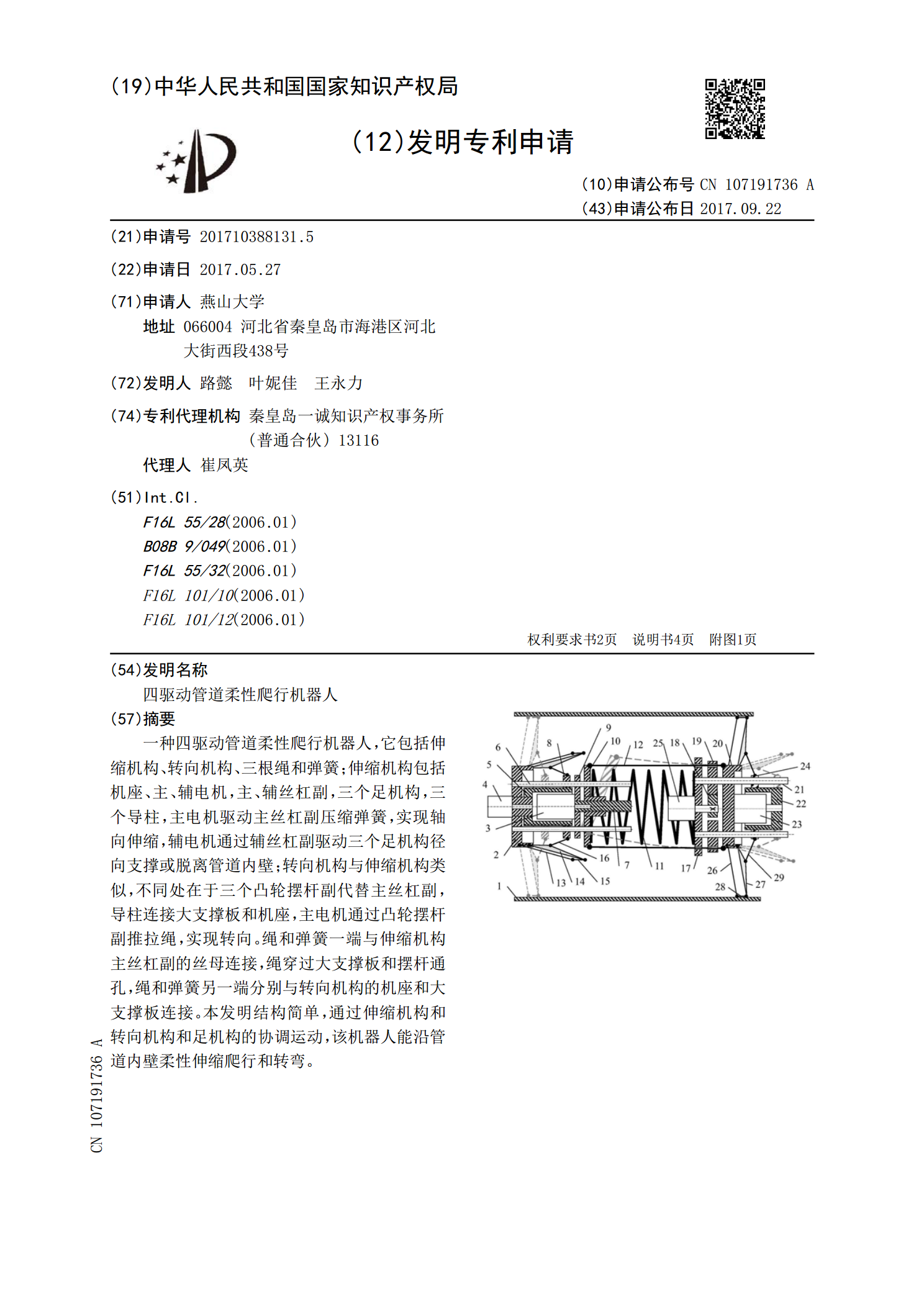
一种四驱动管道柔性爬行机器人,它包括伸缩机构、转向机构、三根绳和弹簧;伸缩机构包括机座、主、辅电机,主、辅丝杠副,三个足机构,三个导柱,主电机驱动主丝杠副压缩弹簧,实现轴向伸缩,辅电机通过辅丝杠副驱动三个足机构径向支撑或脱离管道内壁;转向机构与伸缩机构类似,不同处在于三个凸轮摆杆副代替主丝杠副,导柱连接大支撑板和机座,主电机通过凸轮摆杆副推拉绳,实现转向。绳和弹簧一端与伸缩机构主丝杠副的丝母连接,绳穿过大支撑板和摆杆通孔,绳和弹簧另一端分别与转向机构的机座和大支撑板连接。本发明结构简单,通过伸缩机构和转向
管道爬行焊接机器人.pdf
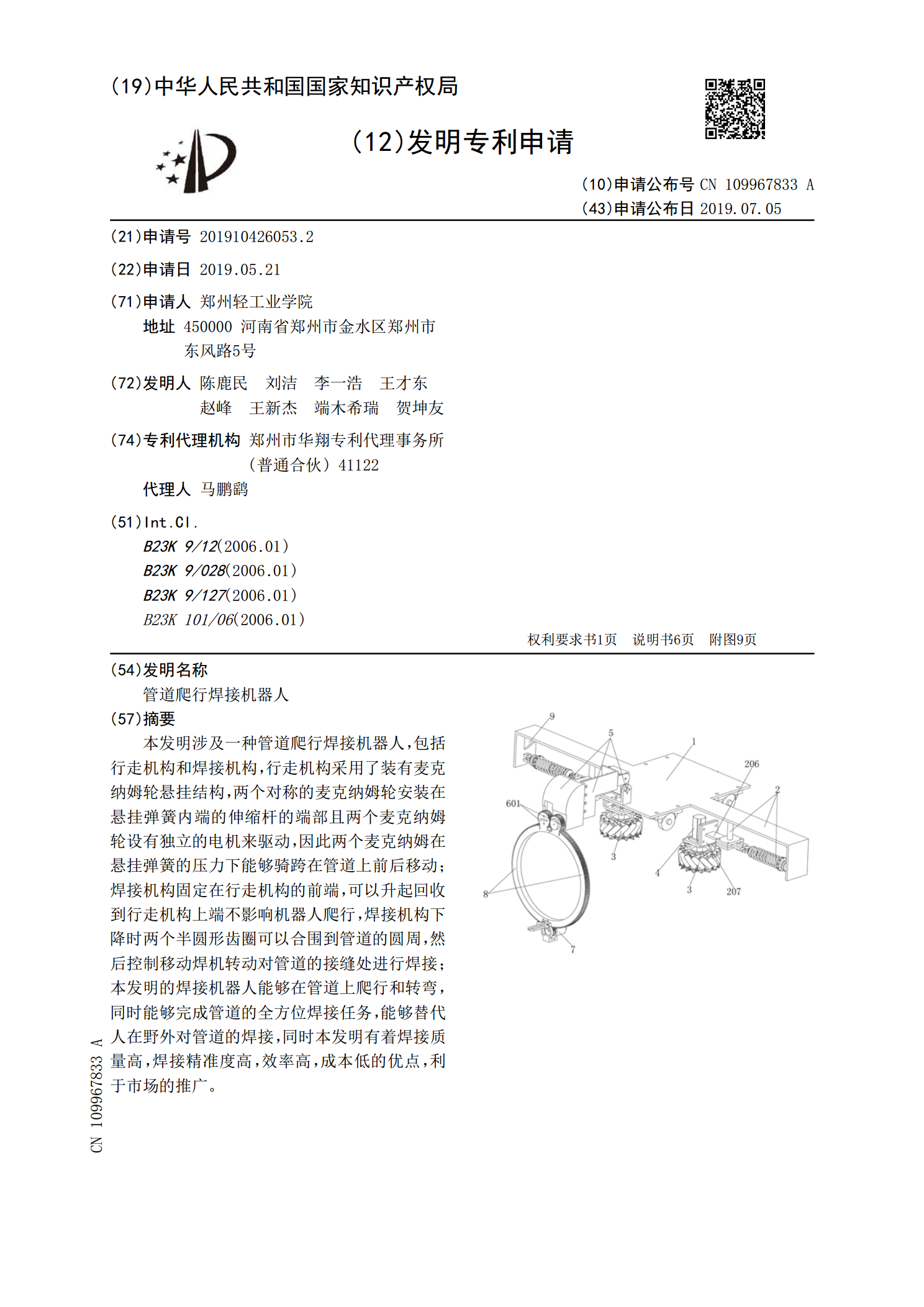
本发明涉及一种管道爬行焊接机器人,包括行走机构和焊接机构,行走机构采用了装有麦克纳姆轮悬挂结构,两个对称的麦克纳姆轮安装在悬挂弹簧内端的伸缩杆的端部且两个麦克纳姆轮设有独立的电机来驱动,因此两个麦克纳姆在悬挂弹簧的压力下能够骑跨在管道上前后移动;焊接机构固定在行走机构的前端,可以升起回收到行走机构上端不影响机器人爬行,焊接机构下降时两个半圆形齿圈可以合围到管道的圆周,然后控制移动焊机转动对管道的接缝处进行焊接;本发明的焊接机器人能够在管道上爬行和转弯,同时能够完成管道的全方位焊接任务,能够替代人在野外对管