
三维点云配准方法研究进展.docx

12****sf


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共50页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

三维点云配准方法研究进展.docx
三维点云配准方法研究进展一、概述随着三维扫描技术的快速发展,三维点云数据在机器人导航、无人驾驶、虚拟现实等领域的应用日益广泛。点云配准技术,作为实现点云数据精确匹配的关键环节,对于提升这些领域的性能至关重要。本文旨在概述三维点云配准方法的研究进展,分析现有技术的优缺点,并展望未来的发展方向。三维点云配准技术的核心任务是将不同时间或不同位置获取的两个点云数据进行对齐,以便实现点云数据的精确匹配。按照算法的不同,点云配准技术可以分为传统方法和基于深度学习的方法。传统方法主要包括迭代最近点(ICP)算法、正态分

点云配准方法.ppt
ABriefIntroductionOfPointCloudRegistrationMethodPointCloudRegistrationMethod1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudRegistrationWithTargetControl1.PointCloudReg

三维点云配准方法的研究的中期报告.docx
三维点云配准方法的研究的中期报告一、研究背景和意义随着三维重建和扫描技术的不断发展,三维点云数据应用越来越广泛。由于采集点云数据的误差、设备精度限制等因素,采集得到的点云数据往往存在缺失、噪声等问题,而三维点云配准是处理点云数据的重要组成部分。因此,研究三维点云配准方法具有重要意义。二、研究内容和方法本文研究基于特征点匹配的三维点云配准方法。该方法包括以下步骤:首先,对两组点云数据提取关键点;然后,对关键点进行描述子计算,以获得关键点的特征表示;接着,采用一对一的最近邻算法对两组关键点进行匹配,并计算匹配

三维点云配准技术研究.docx
三维点云配准技术研究一、概述随着计算机视觉和模式识别技术的迅速发展,三维点云配准技术已成为该领域的研究热点之一。该技术主要关注于解决两个或多个点云数据之间的空间对齐问题,通过寻找一种合适的几何变换,使得这些点云能够在三维空间中实现精确匹配。三维点云配准技术在多个领域具有广泛的应用价值,如三维重建、机器人定位与导航、无人驾驶以及虚拟现实等。在三维重建中,配准技术可以用于将不同视角或不同时间获取的点云数据进行融合,从而构建出更为完整和准确的三维模型。在机器人导航和无人驾驶领域,配准技术可以帮助机器人或车辆准确
三维模型与点云的配准方法及系统.pdf
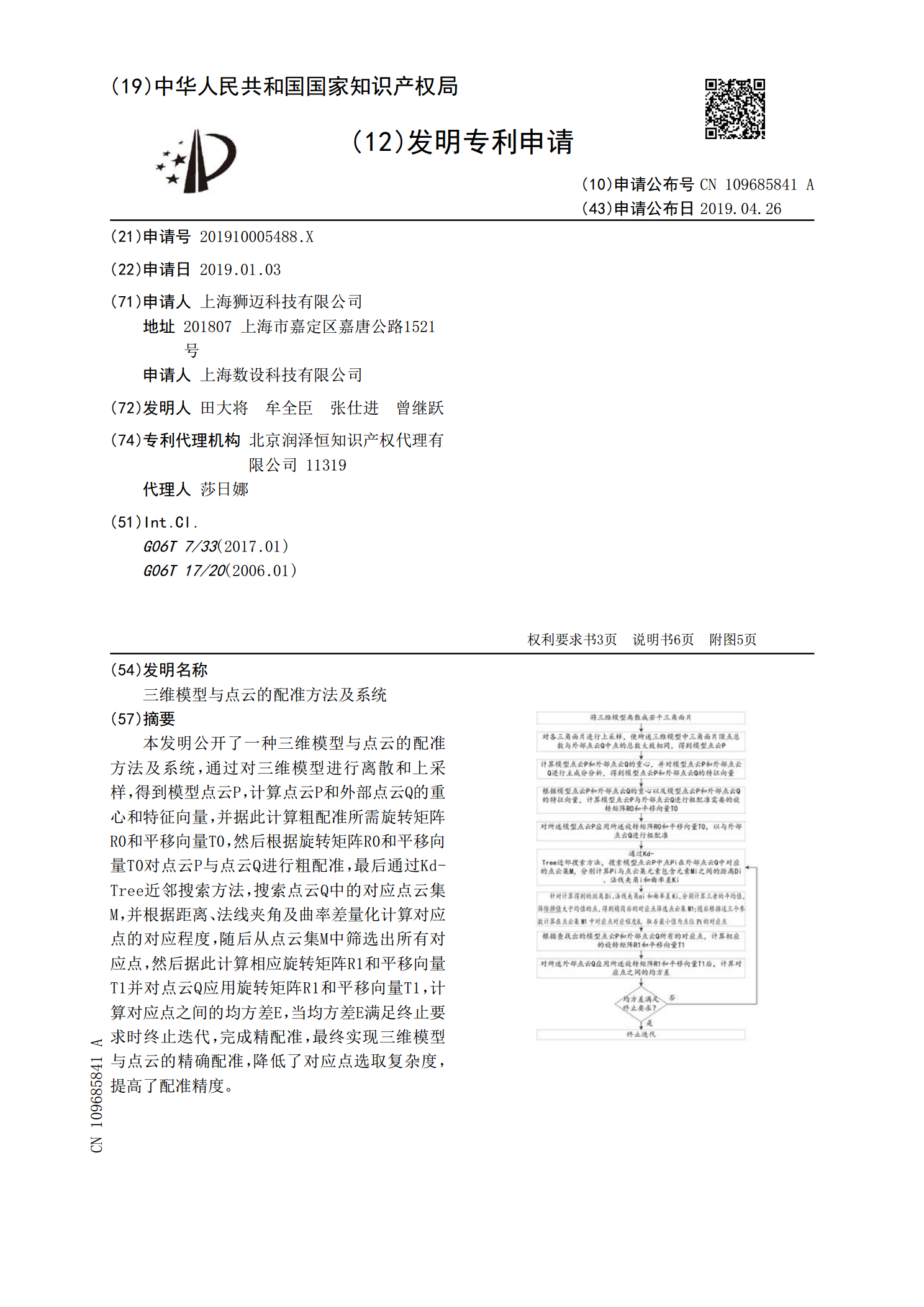
本发明公开了一种三维模型与点云的配准方法及系统,通过对三维模型进行离散和上采样,得到模型点云P,计算点云P和外部点云Q的重心和特征向量,并据此计算粗配准所需旋转矩阵R0和平移向量T0,然后根据旋转矩阵R0和平移向量T0对点云P与点云Q进行粗配准,最后通过Kd‑Tree近邻搜索方法,搜索点云Q中的对应点云集M,并根据距离、法线夹角及曲率差量化计算对应点的对应程度,随后从点云集M中筛选出所有对应点,然后据此计算相应旋转矩阵R1和平移向量T1并对点云Q应用旋转矩阵R1和平移向量T1,计算对应点之间的均方差E,当