
一种能自动更换灯管的机器人及其更换方法.pdf

含平****ng


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种能自动更换灯管的机器人及其更换方法.pdf
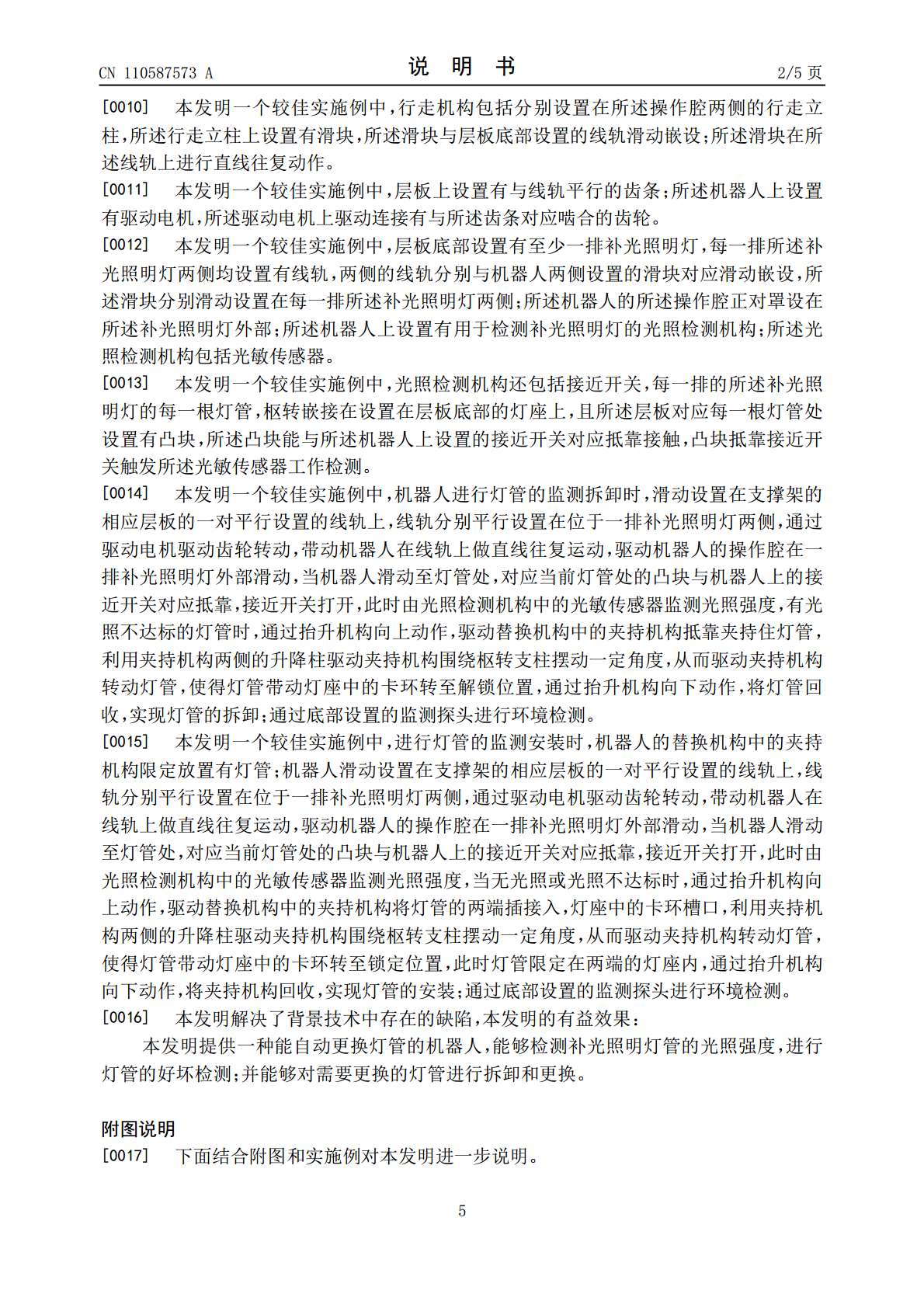
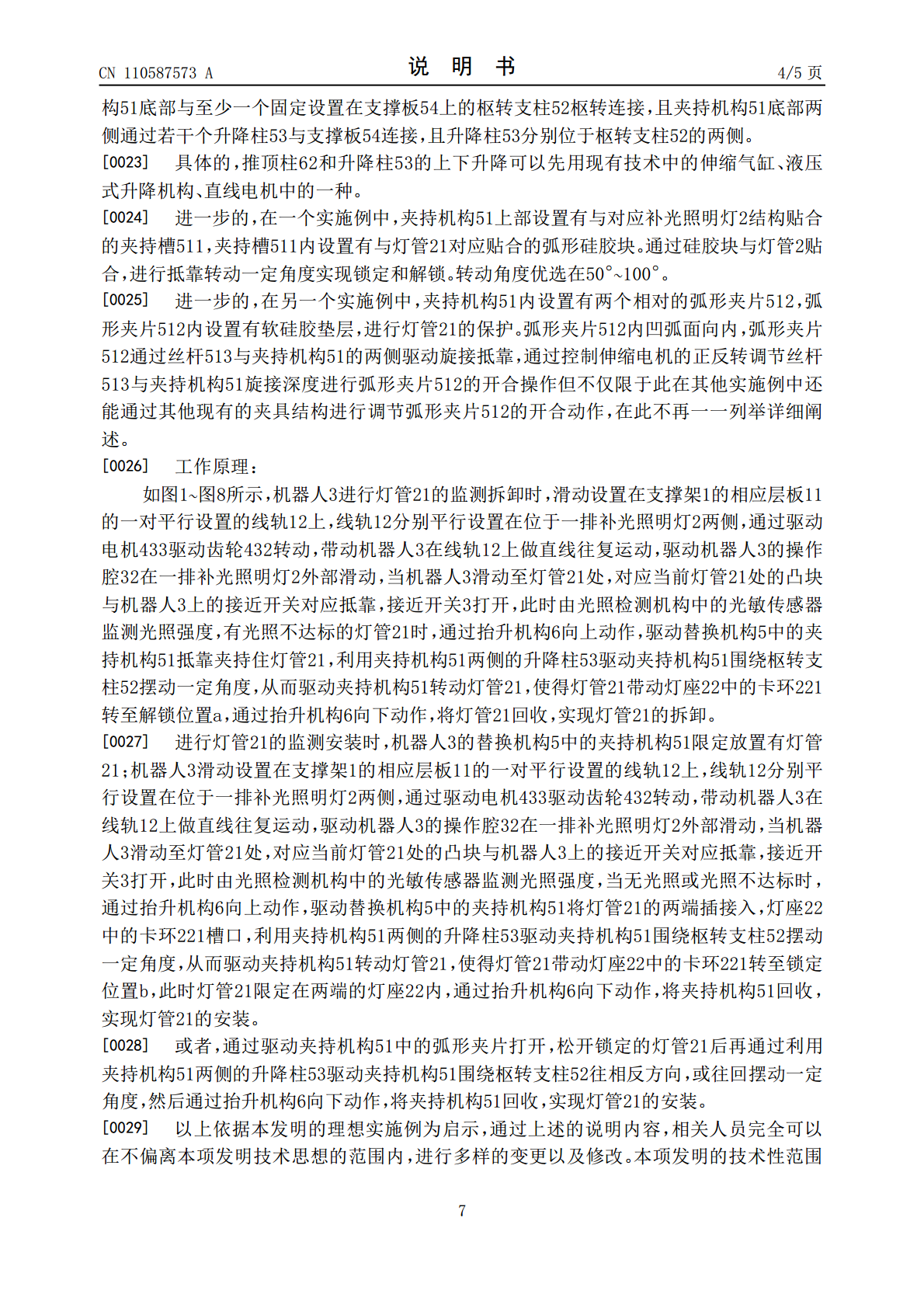
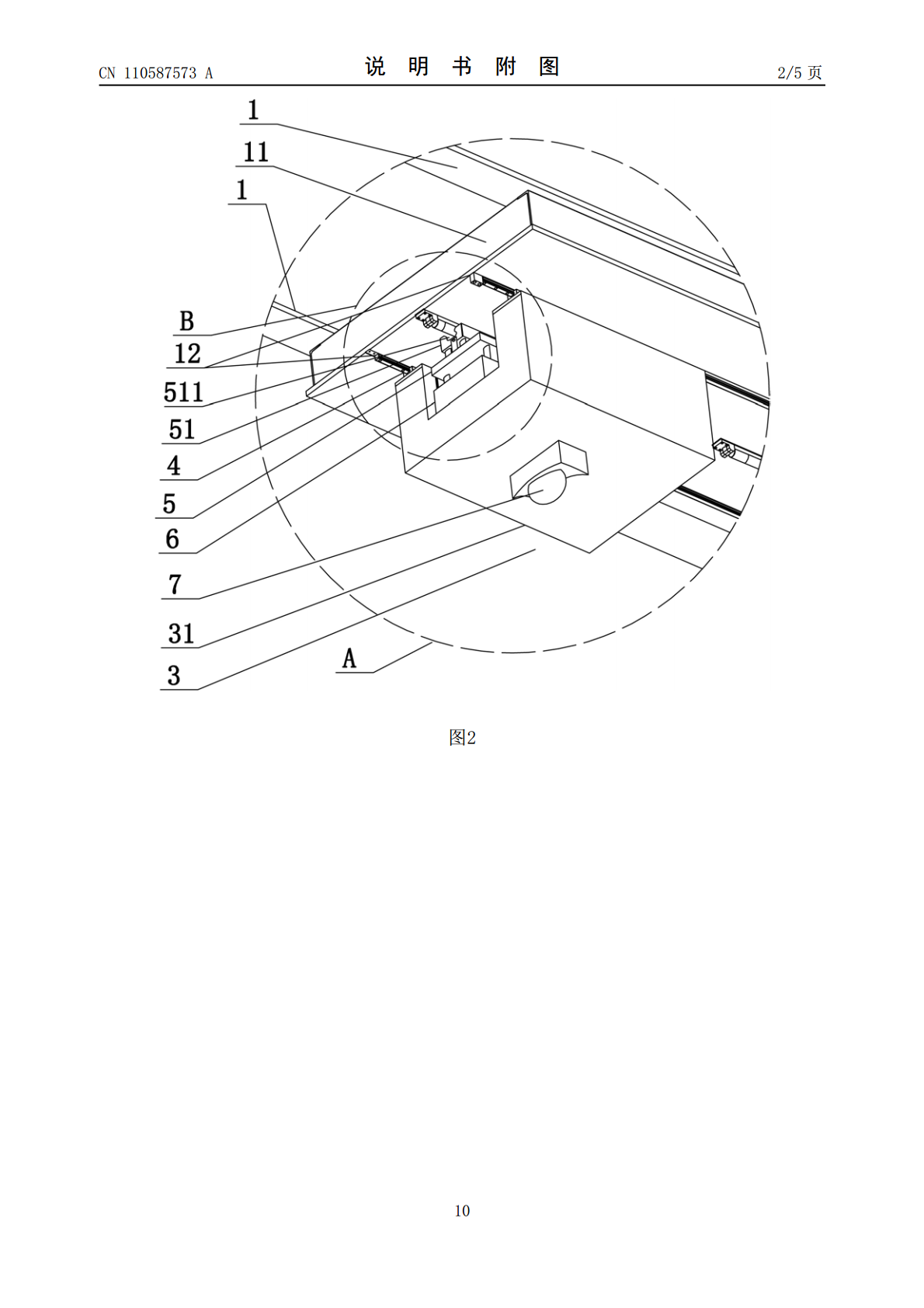
本发明涉及一种能自动更换灯管的机器人,包括滑动设置在支撑架的层板上的机器人,所述机器人上还设置有监测探头,所述机器人上设置有正对层板的操作腔,所述操作腔两侧设置有能够滑动设置在所述层板上的行走机构,所述操作腔内设置有用于拆装部件用的替换机构,所述替换机构通过抬升机构与所述操作腔驱动连接。本发明提供了一种能自动更换灯管的机器人,能够检测补光照明灯管的光照强度,进行灯管的好坏以及环境检测;并能够对需要更换的灯管进行拆卸和更换。
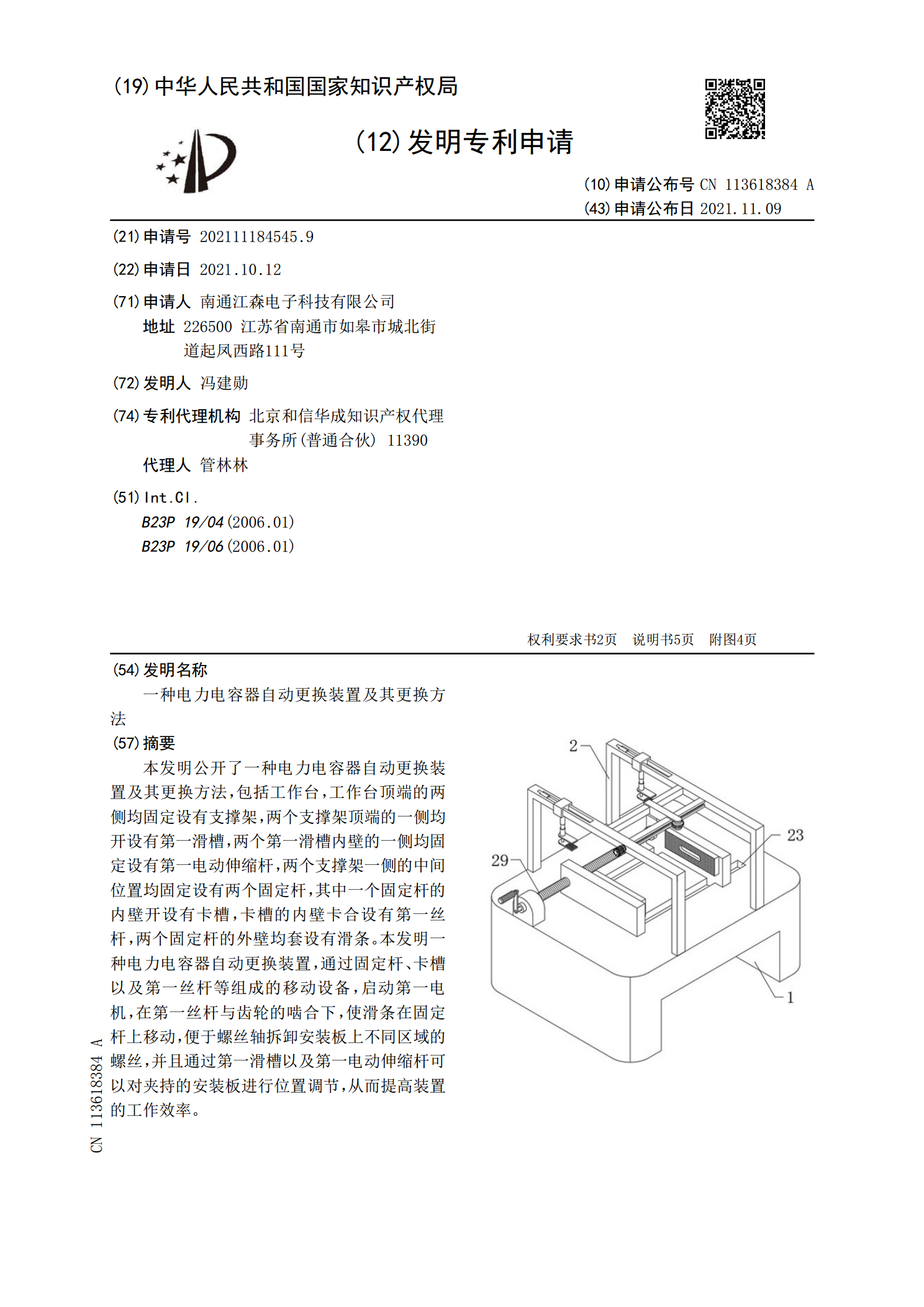
一种电力电容器自动更换装置及其更换方法.pdf
本发明公开了一种电力电容器自动更换装置及其更换方法,包括工作台,工作台顶端的两侧均固定设有支撑架,两个支撑架顶端的一侧均开设有第一滑槽,两个第一滑槽内壁的一侧均固定设有第一电动伸缩杆,两个支撑架一侧的中间位置均固定设有两个固定杆,其中一个固定杆的内壁开设有卡槽,卡槽的内壁卡合设有第一丝杆,两个固定杆的外壁均套设有滑条。本发明一种电力电容器自动更换装置,通过固定杆、卡槽以及第一丝杆等组成的移动设备,启动第一电机,在第一丝杆与齿轮的啮合下,使滑条在固定杆上移动,便于螺丝轴拆卸安装板上不同区域的螺丝,并且通过第
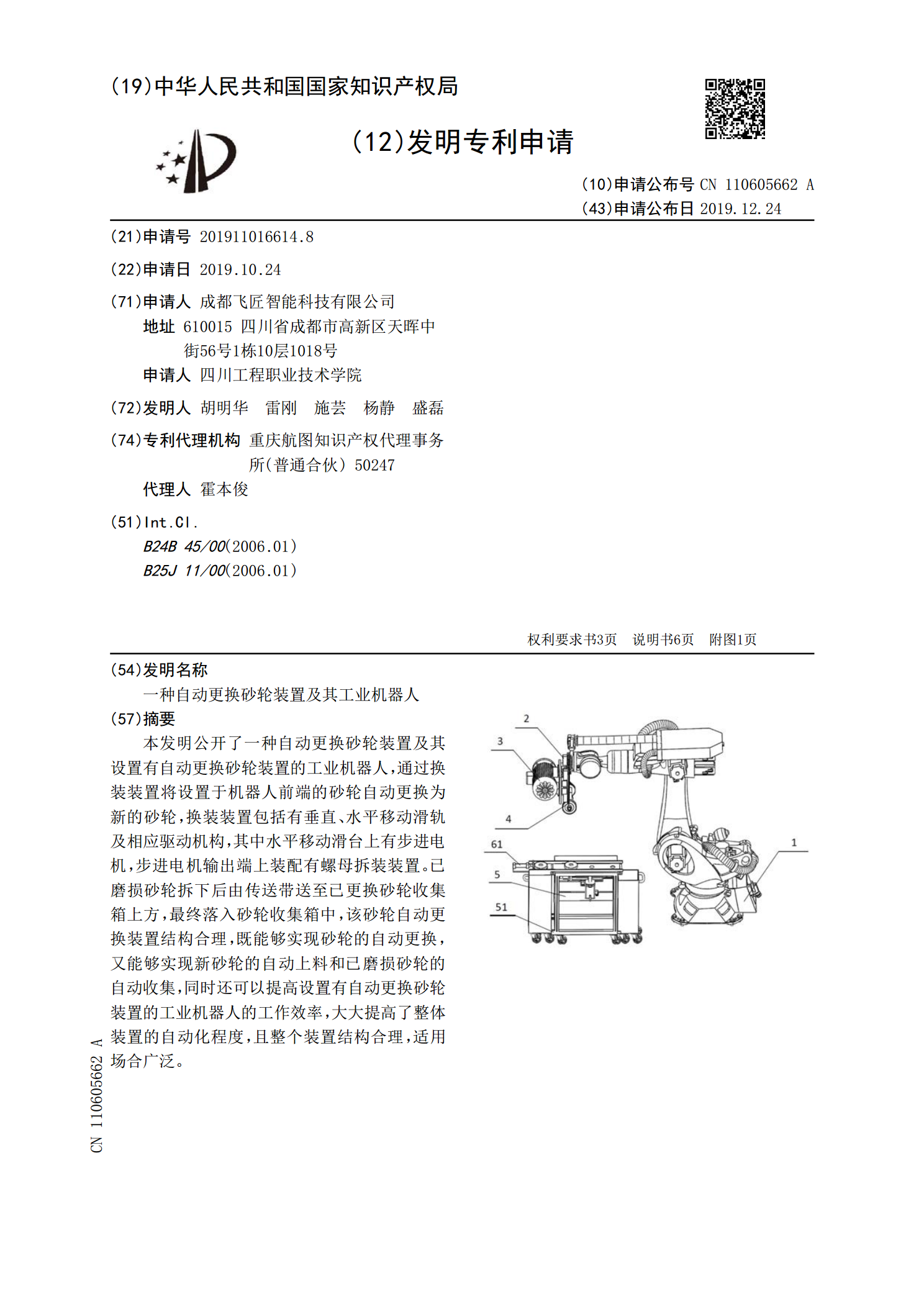
一种自动更换砂轮装置及其工业机器人.pdf
本发明公开了一种自动更换砂轮装置及其设置有自动更换砂轮装置的工业机器人,通过换装装置将设置于机器人前端的砂轮自动更换为新的砂轮,换装装置包括有垂直、水平移动滑轨及相应驱动机构,其中水平移动滑台上有步进电机,步进电机输出端上装配有螺母拆装装置。已磨损砂轮拆下后由传送带送至已更换砂轮收集箱上方,最终落入砂轮收集箱中,该砂轮自动更换装置结构合理,既能够实现砂轮的自动更换,又能够实现新砂轮的自动上料和已磨损砂轮的自动收集,同时还可以提高设置有自动更换砂轮装置的工业机器人的工作效率,大大提高了整体装置的自动化程度,
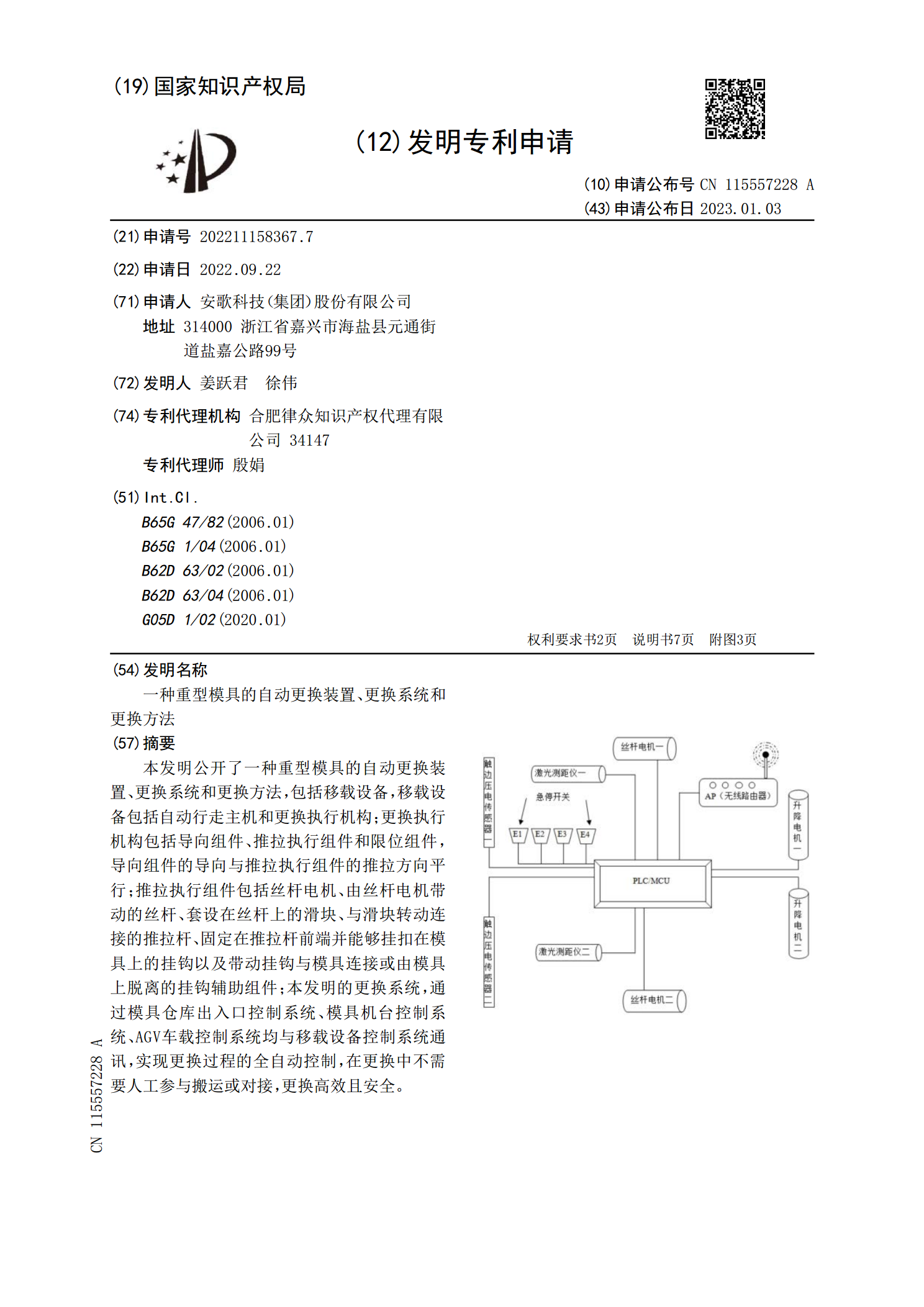
一种重型模具的自动更换装置、更换系统和更换方法.pdf
本发明公开了一种重型模具的自动更换装置、更换系统和更换方法,包括移载设备,移载设备包括自动行走主机和更换执行机构;更换执行机构包括导向组件、推拉执行组件和限位组件,导向组件的导向与推拉执行组件的推拉方向平行;推拉执行组件包括丝杆电机、由丝杆电机带动的丝杆、套设在丝杆上的滑块、与滑块转动连接的推拉杆、固定在推拉杆前端并能够挂扣在模具上的挂钩以及带动挂钩与模具连接或由模具上脱离的挂钩辅助组件;本发明的更换系统,通过模具仓库出入口控制系统、模具机台控制系统、AGV车载控制系统均与移载设备控制系统通讯,实现更换过
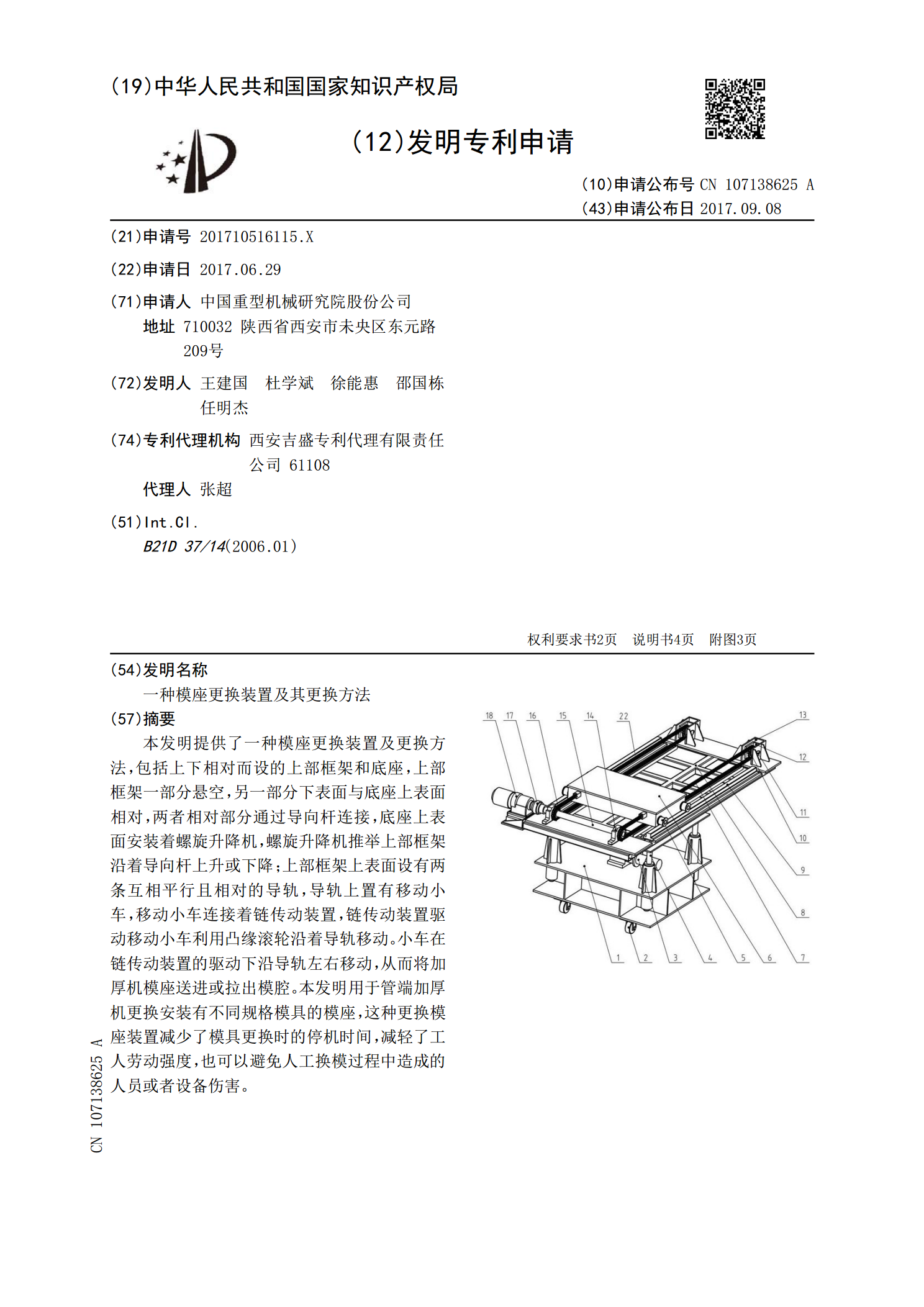
一种模座更换装置及其更换方法.pdf
本发明提供了一种模座更换装置及更换方法,包括上下相对而设的上部框架和底座,上部框架一部分悬空,另一部分下表面与底座上表面相对,两者相对部分通过导向杆连接,底座上表面安装着螺旋升降机,螺旋升降机推举上部框架沿着导向杆上升或下降;上部框架上表面设有两条互相平行且相对的导轨,导轨上置有移动小车,移动小车连接着链传动装置,链传动装置驱动移动小车利用凸缘滚轮沿着导轨移动。小车在链传动装置的驱动下沿导轨左右移动,从而将加厚机模座送进或拉出模腔。本发明用于管端加厚机更换安装有不同规格模具的模座,这种更换模座装置减少了模