
基于UWB模块、语义地图与视觉信息的定位方法.pdf

戊午****jj


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于UWB模块、语义地图与视觉信息的定位方法.pdf
本发明属于图像处理领域,具体公开了一种基于UWB模块、语义地图与视觉信息的定位方法。包括以下步骤:步骤1,在游泳池场景安装布置UWB基站标签、双光谱摄像头;步骤2,通过UWB定位获得游泳池内人员的位置;步骤3,对可见光视频中人员进行检测,经过透视变换,获得游泳池内人员的位置;步骤4,将UWB定位数据、可见光视频中人员位置、热成像视频中人员位置绑定,进行人员配对;步骤5,构建语义地图,每个人在2种模态下的位置在地图上实时显示。本发明通过对游泳池人员在UWB、可见光视频中的位置配对,准确获得人员位置,并在语义

基于语义地图视觉SLAM系统设计.docx
基于语义地图视觉SLAM系统设计标题:基于语义地图的视觉SLAM系统设计摘要:随着无人系统和自主导航技术的发展,视觉SLAM(SimultaneousLocalizationandMapping)在机器人领域中扮演着重要的角色。视觉SLAM系统通过结合视觉感知和地图构建来实现机器人的定位和地图生成。然而,传统视觉SLAM系统中仅仅考虑几何信息,忽略了场景内物体的语义信息,限制了机器人在复杂环境中的理解和决策能力。本文提出一种基于语义地图的视觉SLAM系统设计,通过将物体的语义标签与地图信息结合,提高机器人

基于语义特征的视觉定位研究.docx
基于语义特征的视觉定位研究基于语义特征的视觉定位研究摘要:随着计算机视觉技术的迅速发展,视觉定位在很多领域中起着至关重要的作用。然而,传统的视觉定位方法往往依赖于低级特征,对于复杂场景中的定位问题表现出限制性能。为了进一步提升视觉定位的精度和鲁棒性,本文提出了一种基于语义特征的视觉定位方法。该方法将图像的语义信息与视觉定位相结合,通过计算图像内不同物体的空间关系来实现精确的视觉定位。关键词:语义特征,视觉定位,计算机视觉,语义信息,空间关系1.引言视觉定位作为一种基于视觉信息的定位方法,在自动驾驶、机器人
基于点云地图视觉定位的MR导航方法.pdf
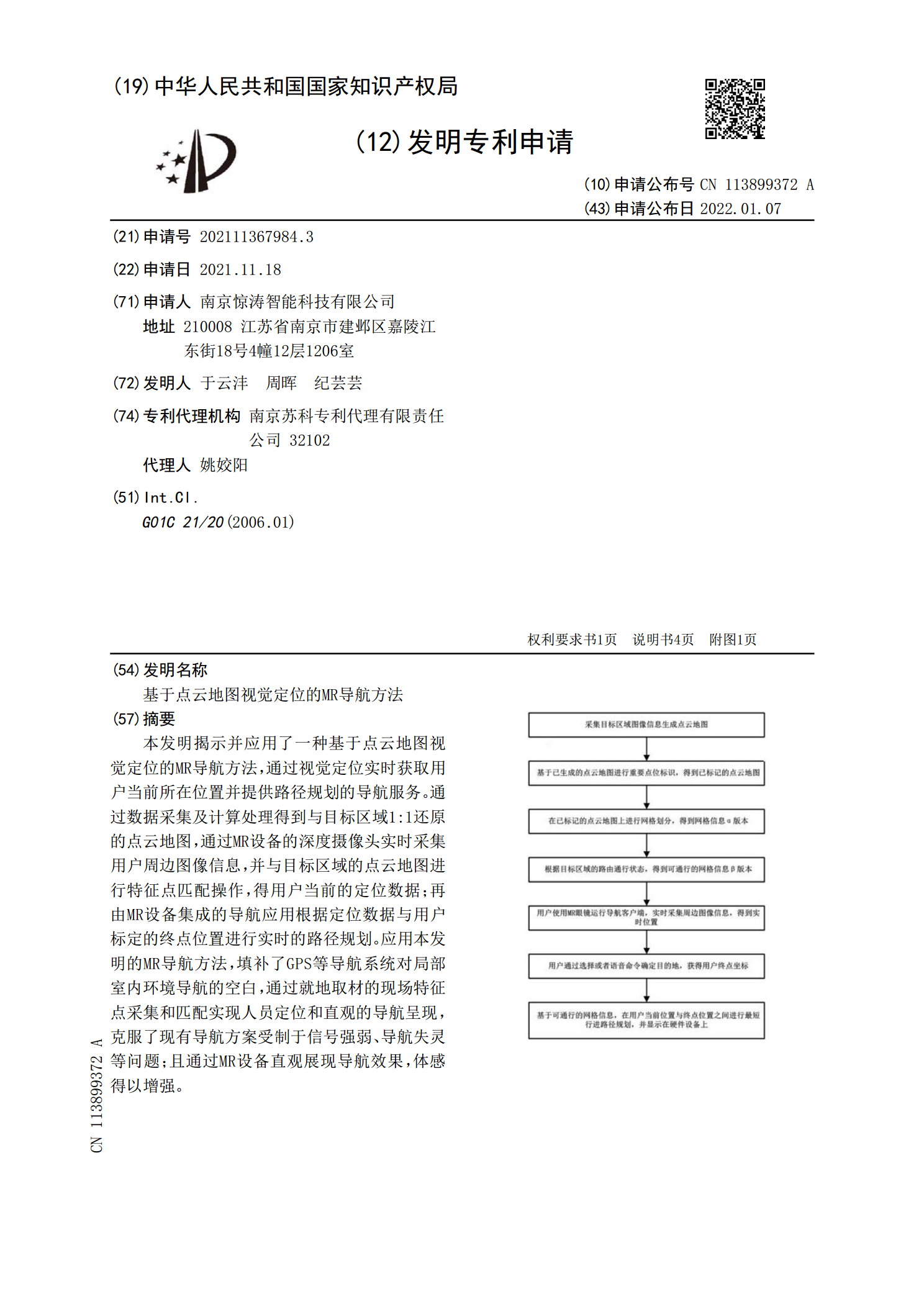
本发明揭示并应用了一种基于点云地图视觉定位的MR导航方法,通过视觉定位实时获取用户当前所在位置并提供路径规划的导航服务。通过数据采集及计算处理得到与目标区域1:1还原的点云地图,通过MR设备的深度摄像头实时采集用户周边图像信息,并与目标区域的点云地图进行特征点匹配操作,得用户当前的定位数据;再由MR设备集成的导航应用根据定位数据与用户标定的终点位置进行实时的路径规划。应用本发明的MR导航方法,填补了GPS等导航系统对局部室内环境导航的空白,通过就地取材的现场特征点采集和匹配实现人员定位和直观的导航呈现,克
基于视觉SLAM的动态场景多语义地图构建方法及设备.pdf
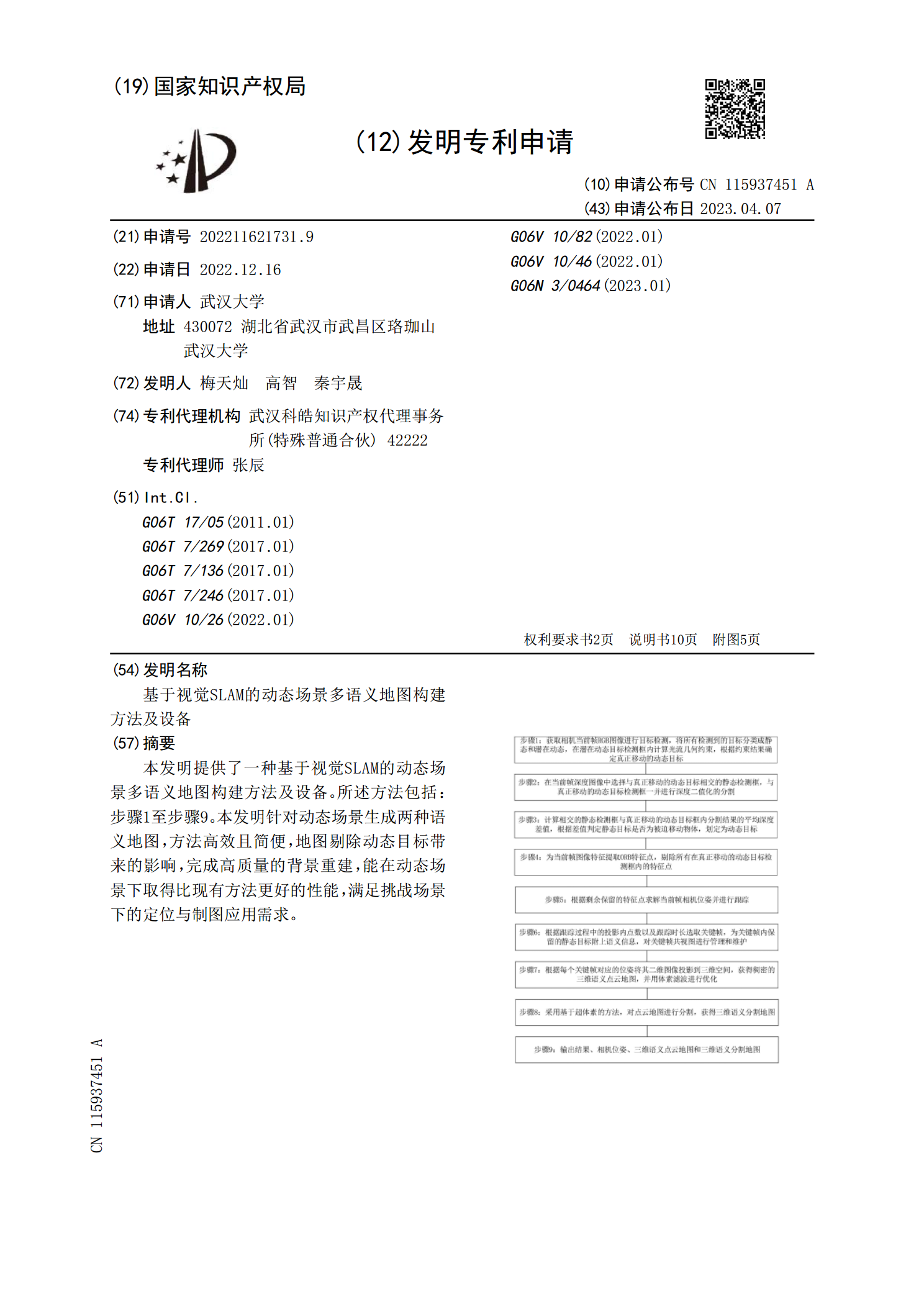
本发明提供了一种基于视觉SLAM的动态场景多语义地图构建方法及设备。所述方法包括:步骤1至步骤9。本发明针对动态场景生成两种语义地图,方法高效且简便,地图剔除动态目标带来的影响,完成高质量的背景重建,能在动态场景下取得比现有方法更好的性能,满足挑战场景下的定位与制图应用需求。