
一种助行器.pdf

醉香****mm


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种助行器的行走轮及助行器.pdf
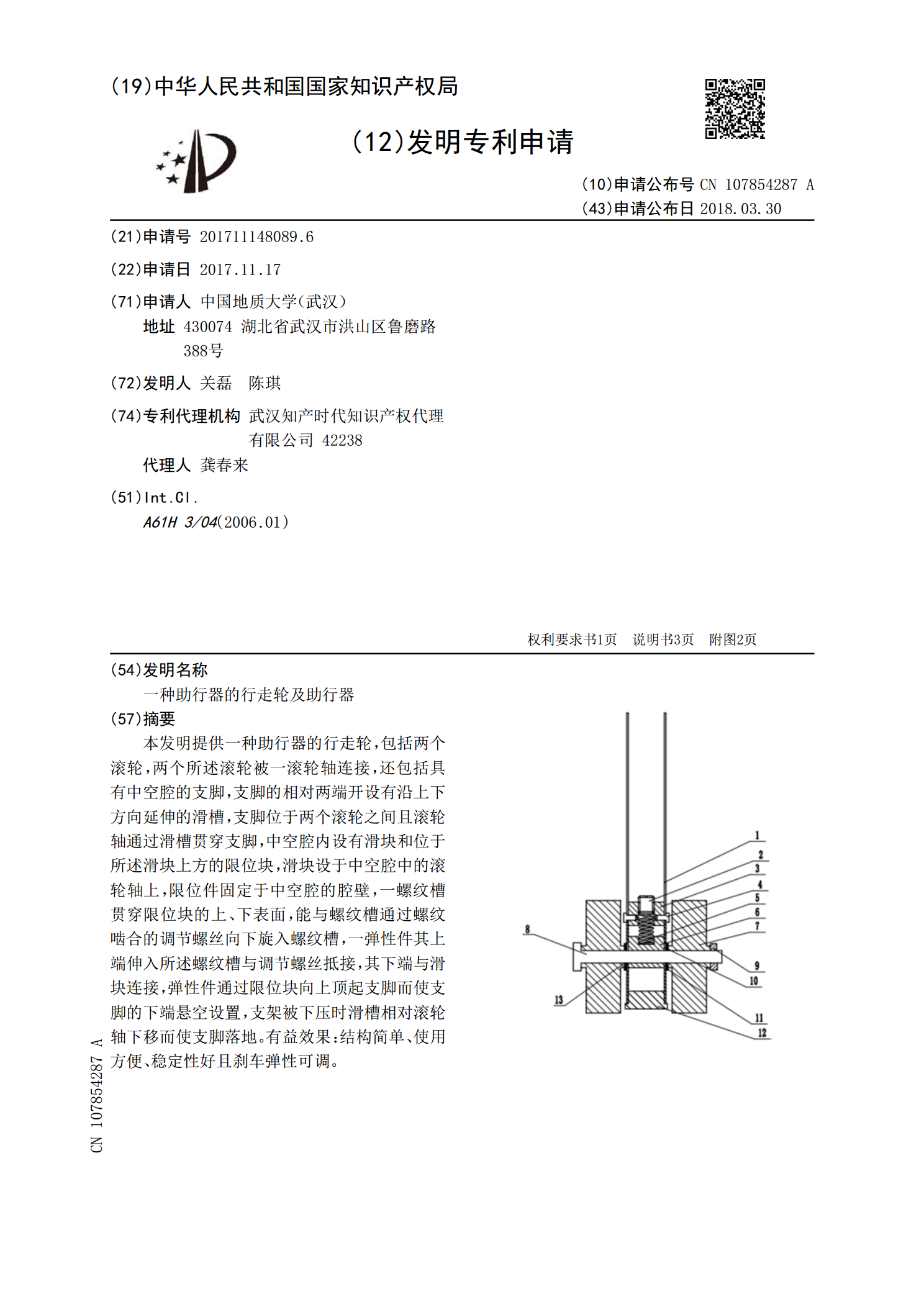
本发明提供一种助行器的行走轮,包括两个滚轮,两个所述滚轮被一滚轮轴连接,还包括具有中空腔的支脚,支脚的相对两端开设有沿上下方向延伸的滑槽,支脚位于两个滚轮之间且滚轮轴通过滑槽贯穿支脚,中空腔内设有滑块和位于所述滑块上方的限位块,滑块设于中空腔中的滚轮轴上,限位件固定于中空腔的腔壁,一螺纹槽贯穿限位块的上、下表面,能与螺纹槽通过螺纹啮合的调节螺丝向下旋入螺纹槽,一弹性件其上端伸入所述螺纹槽与调节螺丝抵接,其下端与滑块连接,弹性件通过限位块向上顶起支脚而使支脚的下端悬空设置,支架被下压时滑槽相对滚轮轴下移而使

一种助行器.pdf
本发明创造提供一种助行器,所述助行器包括车座、扶手、高度调节管、主体支撑管、连接架和车轮,所述扶手位于车座边缘,车座底部与高度调节管顶部相连,高度调节管底部与主体支撑管螺栓连接,车轮通过连接架与肢体支撑管相连,所述车轮为3个或4个,所述车轮类型为PU轮或金属万向轮。本发明创造的有益效果是,帮助使用者减轻关节负担,适用于因下肢关节病痛或股骨头坏死倾向等外伤造成的行走困难人员,帮助其站立行走,提高生活质量。同时也适用于中老年人对腿部特别是膝关节损伤的预防,在平时行走时使用,减轻膝盖负担。

一种助行器.pdf
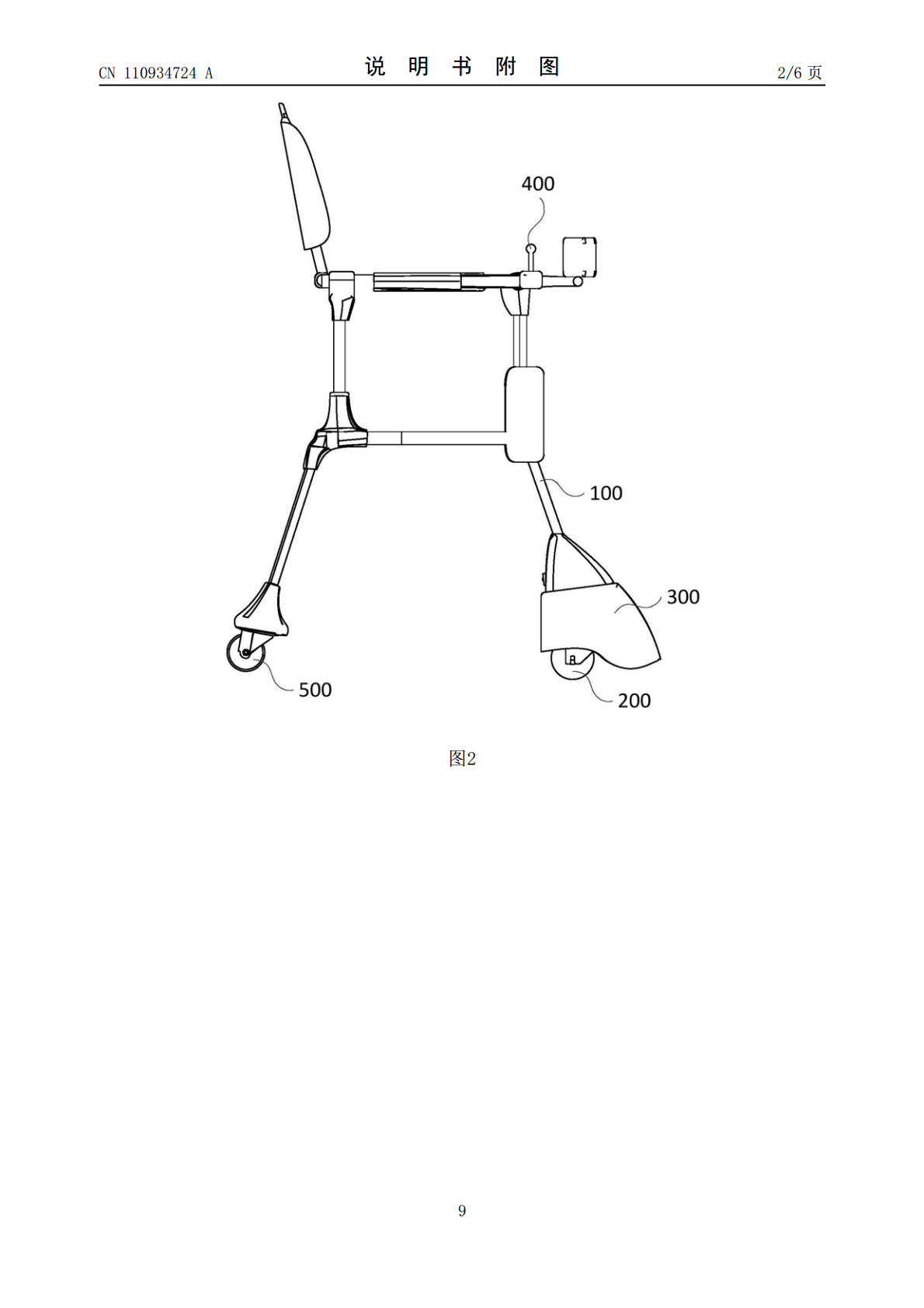
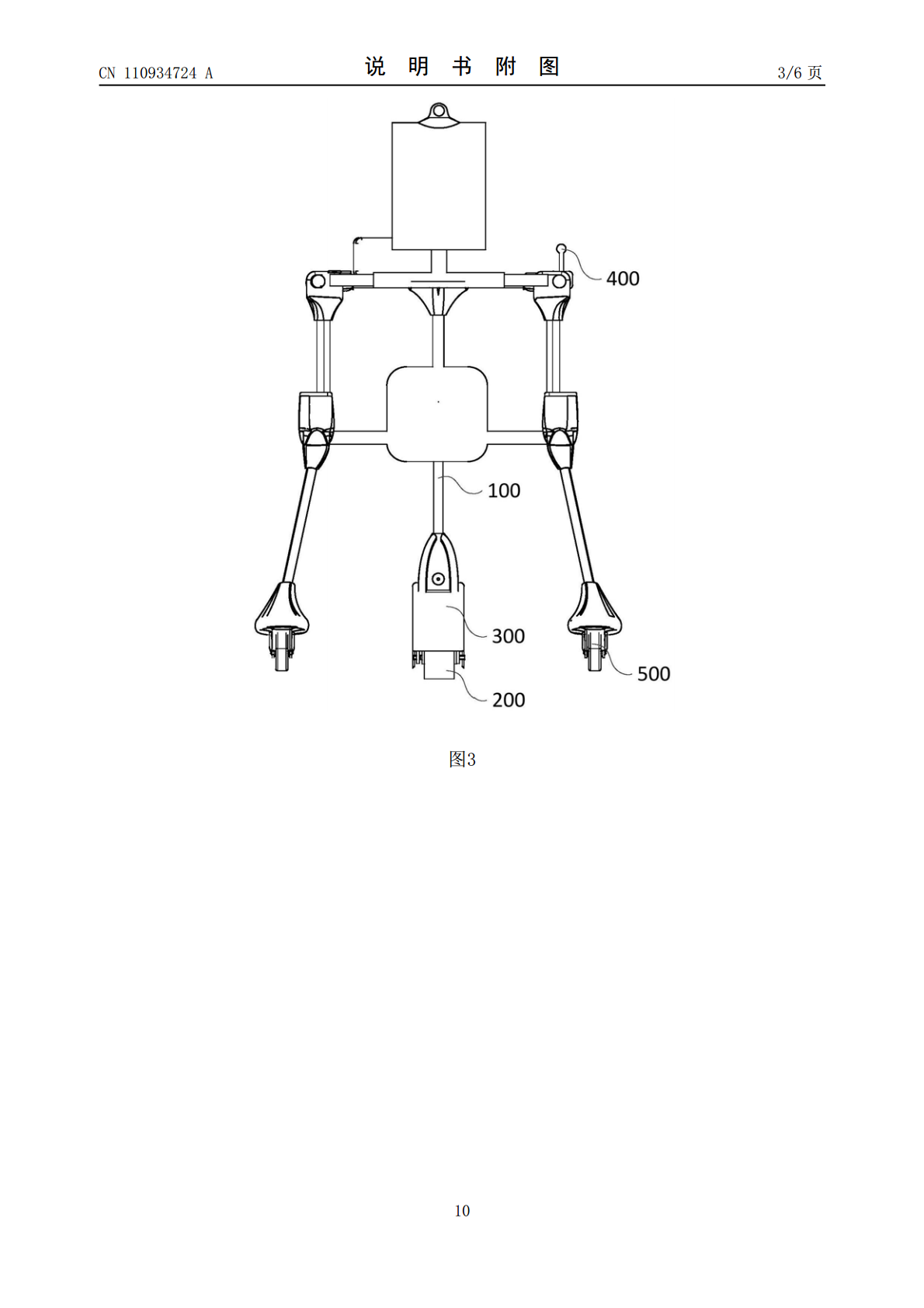
本发明公开了一种助行器,该助行器包括支撑架、主动轮以及主动轮驱动机构,主动轮设置于支撑架上,用于带动支撑架运动;主动轮驱动机构设置于支撑架上且与主动轮连接,用于驱动主动轮行走和/或转向。本发明通过在助行器的支撑架上设置主动轮驱动机构,以驱动设置于支撑架上的主动轮行走和/或转向,从而带动支撑架运动,实现助行器的主动控制,能够根据预设的路线和速度辅助用户行走,从而实现有规划的康复训练功能,智能化程度较高、康复训练的效果较好。
一种助行器.pdf
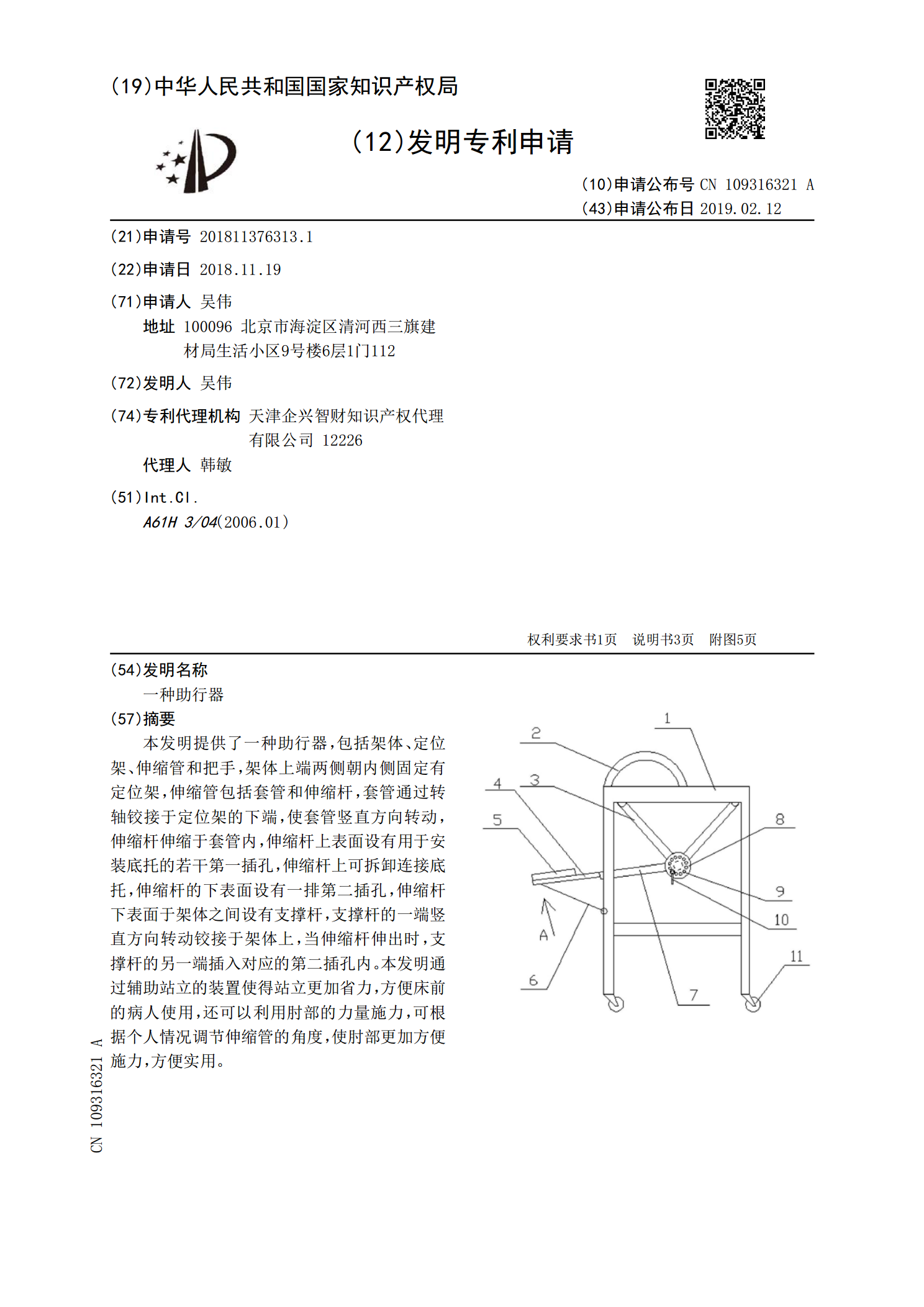
本发明提供了一种助行器,包括架体、定位架、伸缩管和把手,架体上端两侧朝内侧固定有定位架,伸缩管包括套管和伸缩杆,套管通过转轴铰接于定位架的下端,使套管竖直方向转动,伸缩杆伸缩于套管内,伸缩杆上表面设有用于安装底托的若干第一插孔,伸缩杆上可拆卸连接底托,伸缩杆的下表面设有一排第二插孔,伸缩杆下表面于架体之间设有支撑杆,支撑杆的一端竖直方向转动铰接于架体上,当伸缩杆伸出时,支撑杆的另一端插入对应的第二插孔内。本发明通过辅助站立的装置使得站立更加省力,方便床前的病人使用,还可以利用肘部的力量施力,可根据个人情况
一种助行器.pdf
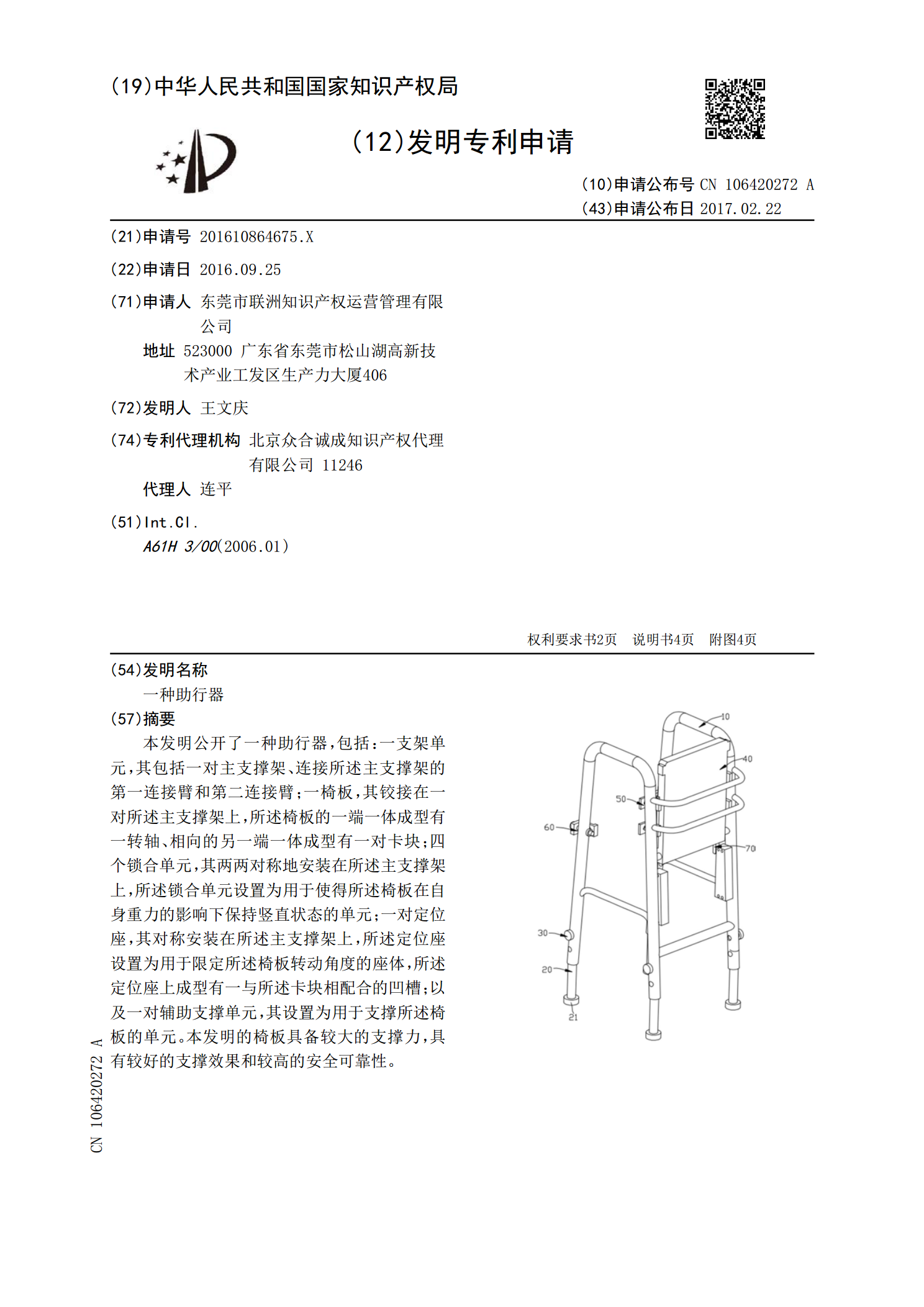
本发明公开了一种助行器,包括:一支架单元,其包括一对主支撑架、连接所述主支撑架的第一连接臂和第二连接臂;一椅板,其铰接在一对所述主支撑架上,所述椅板的一端一体成型有一转轴、相向的另一端一体成型有一对卡块;四个锁合单元,其两两对称地安装在所述主支撑架上,所述锁合单元设置为用于使得所述椅板在自身重力的影响下保持竖直状态的单元;一对定位座,其对称安装在所述主支撑架上,所述定位座设置为用于限定所述椅板转动角度的座体,所述定位座上成型有一与所述卡块相配合的凹槽;以及一对辅助支撑单元,其设置为用于支撑所述椅板的单元。