
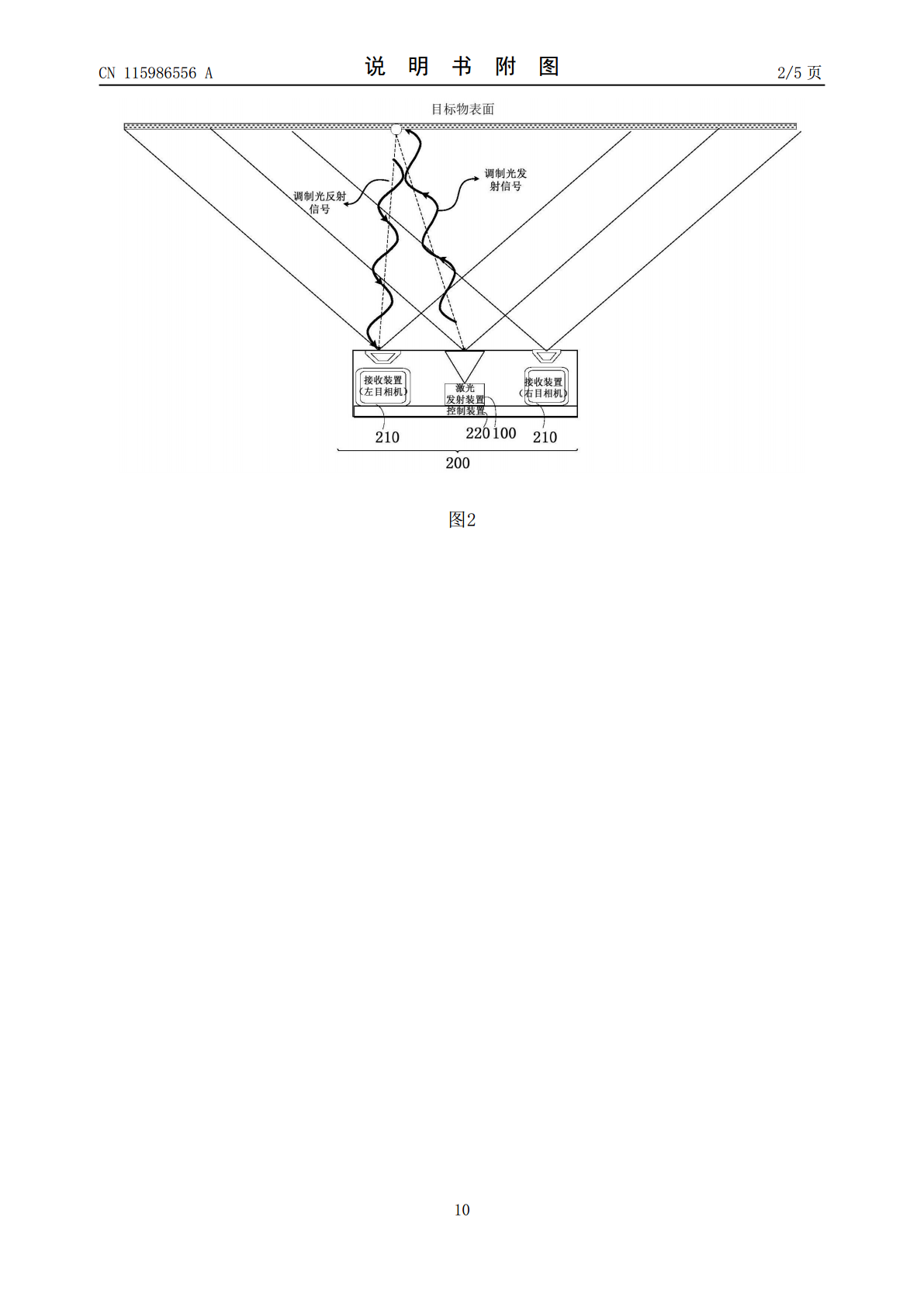
VCSEL阵列驱动装置及双目TOF深度感知系统.pdf

是你****松呀

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

VCSEL阵列驱动装置及双目TOF深度感知系统.pdf
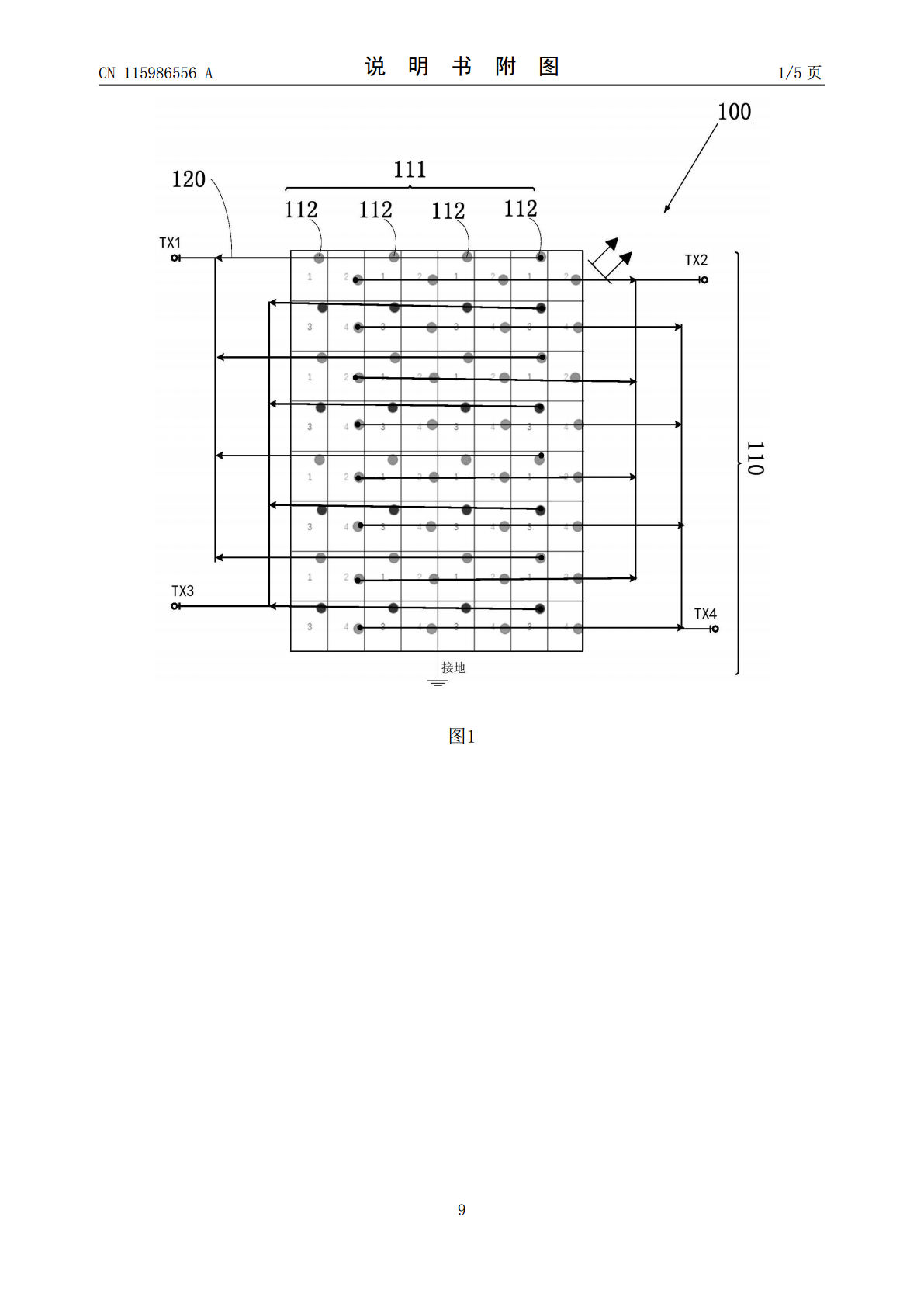
本申请实施例提供一种VCSEL阵列驱动装置及双目TOF深度感知系统。所述VCSEL阵列驱动装置包括VCSEL光源阵列及驱动电路;其中,VCSEL光源阵列包括多组发光阵列子集,每组发光阵列子集至少包括1个VCSEL发光单元,各发光阵列子集内各VCSEL发光单元之间间隔排列;驱动电路与各VCSEL发光单元的控制端电连接,驱动电路用于输出驱动信号点亮VCSEL发光单元,以及输出调制信号对VCSEL发光单元的输出光信号进行调制。所提供的VCSEL阵列驱动装置涉及一种新的VCSEL光源阵列结构及驱动电路,为面向多应
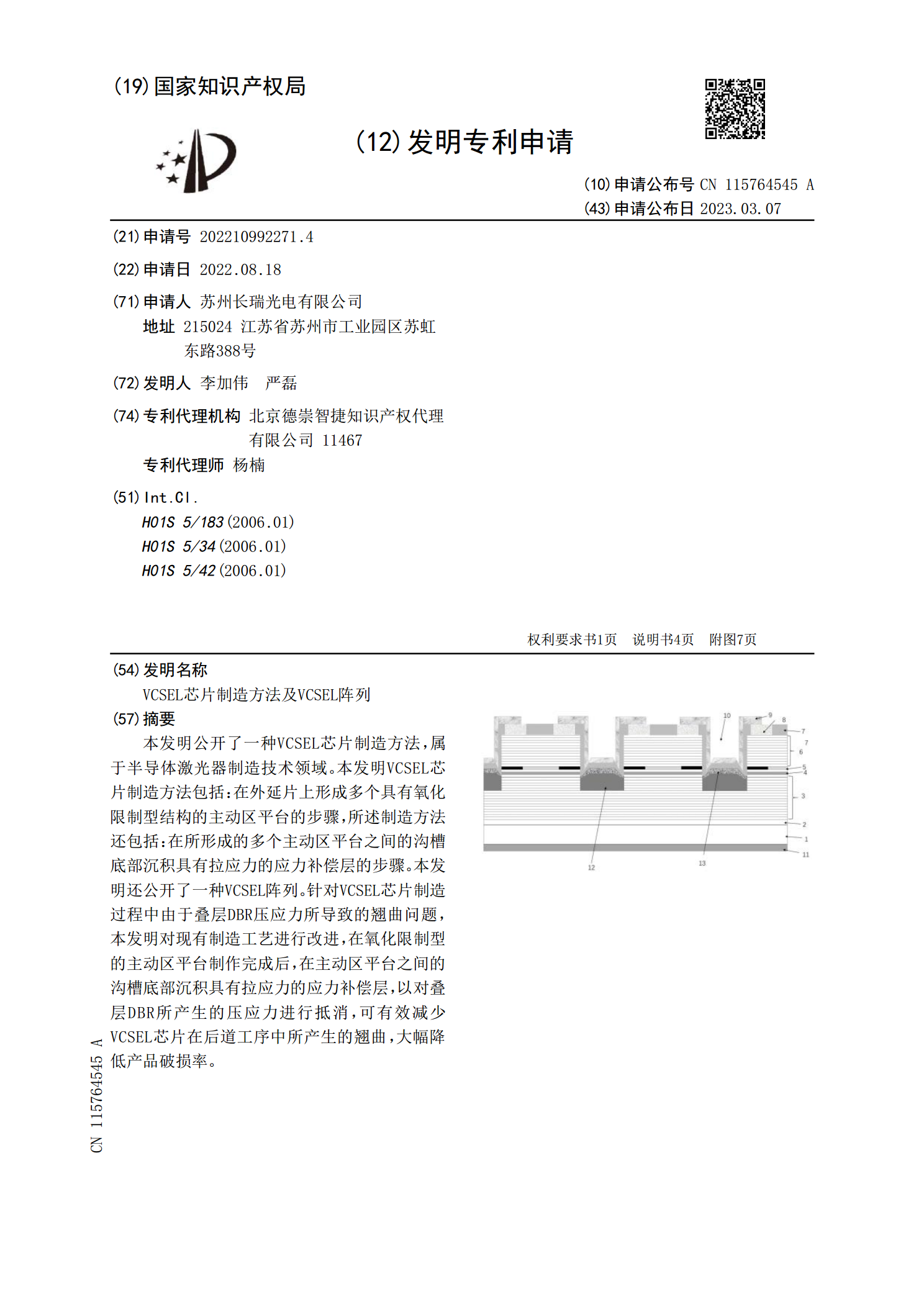
VCSEL芯片制造方法及VCSEL阵列.pdf
本发明公开了一种VCSEL芯片制造方法,属于半导体激光器制造技术领域。本发明VCSEL芯片制造方法包括:在外延片上形成多个具有氧化限制型结构的主动区平台的步骤,所述制造方法还包括:在所形成的多个主动区平台之间的沟槽底部沉积具有拉应力的应力补偿层的步骤。本发明还公开了一种VCSEL阵列。针对VCSEL芯片制造过程中由于叠层DBR压应力所导致的翘曲问题,本发明对现有制造工艺进行改进,在氧化限制型的主动区平台制作完成后,在主动区平台之间的沟槽底部沉积具有拉应力的应力补偿层,以对叠层DBR所产生的压应力进行抵消,

实现VCSEL阵列或VCSEL器件的集成电路.pdf
一种半导体器件包括多个VCSEL器件(或一个VCSEL器件),其由包括以下项的层结构形成:(一个或多个)底部n型层、(一个或多个)中间p型层、形成在(一个或多个)中间p型层之上的n型调制掺杂量子阱结构、形成在(一个或多个)中间p型层和n型调制掺杂量子阱结构之间的至少一个间隔物层以及(一个或多个)顶部p型层。退火的氧注入区垂直设置在至少一个间隔物层内,以及退火的n型离子注入区垂直设置在(一个或多个)顶部p型层内。两个离子注入区可以以连续的方式在多个VCSEL器件之间围绕并横向延伸,以用于电流汇集和隔离。此外
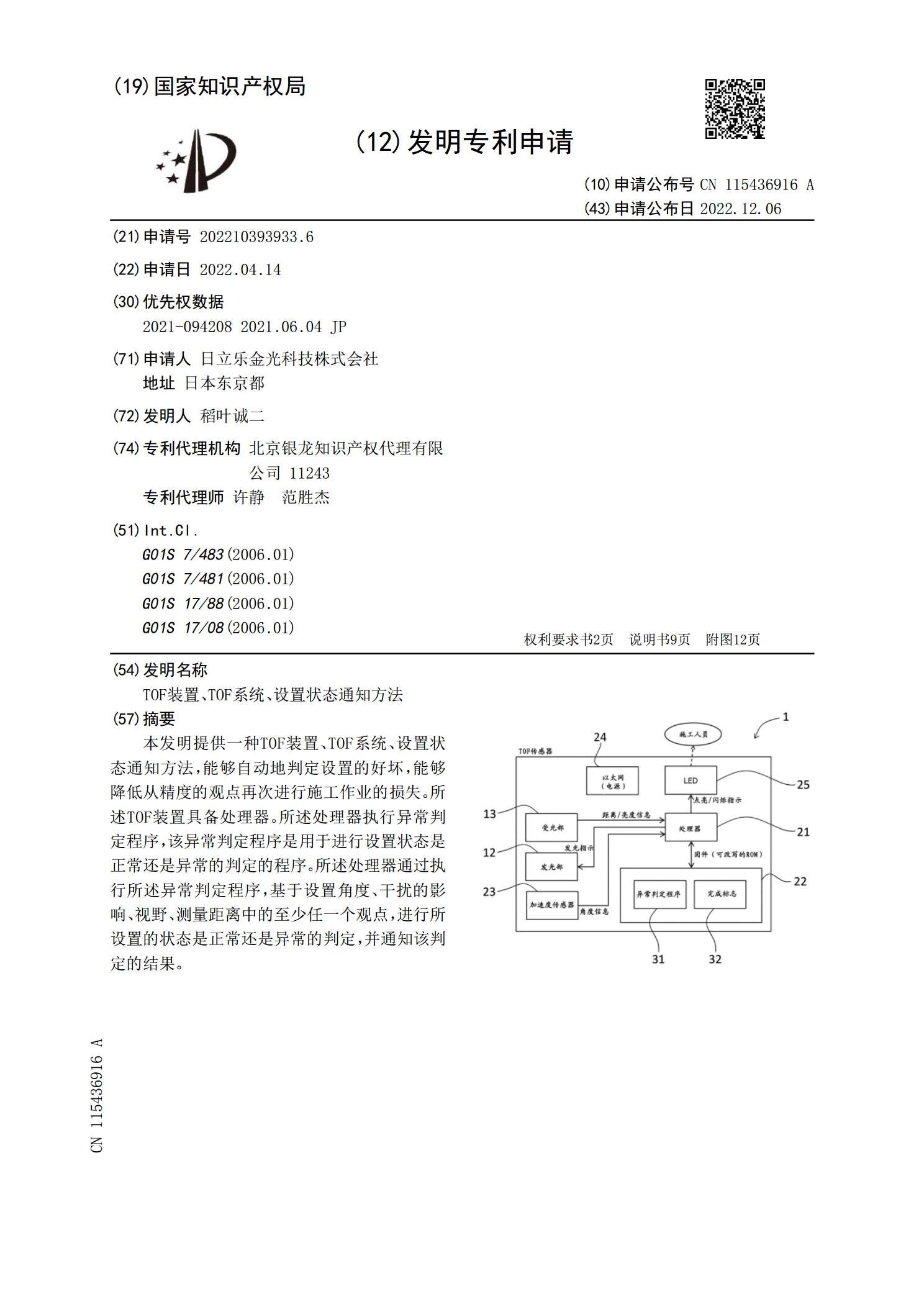
TOF装置、TOF系统、设置状态通知方法.pdf
本发明提供一种TOF装置、TOF系统、设置状态通知方法,能够自动地判定设置的好坏,能够降低从精度的观点再次进行施工作业的损失。所述TOF装置具备处理器。所述处理器执行异常判定程序,该异常判定程序是用于进行设置状态是正常还是异常的判定的程序。所述处理器通过执行所述异常判定程序,基于设置角度、干扰的影响、视野、测量距离中的至少任一个观点,进行所设置的状态是正常还是异常的判定,并通知该判定的结果。
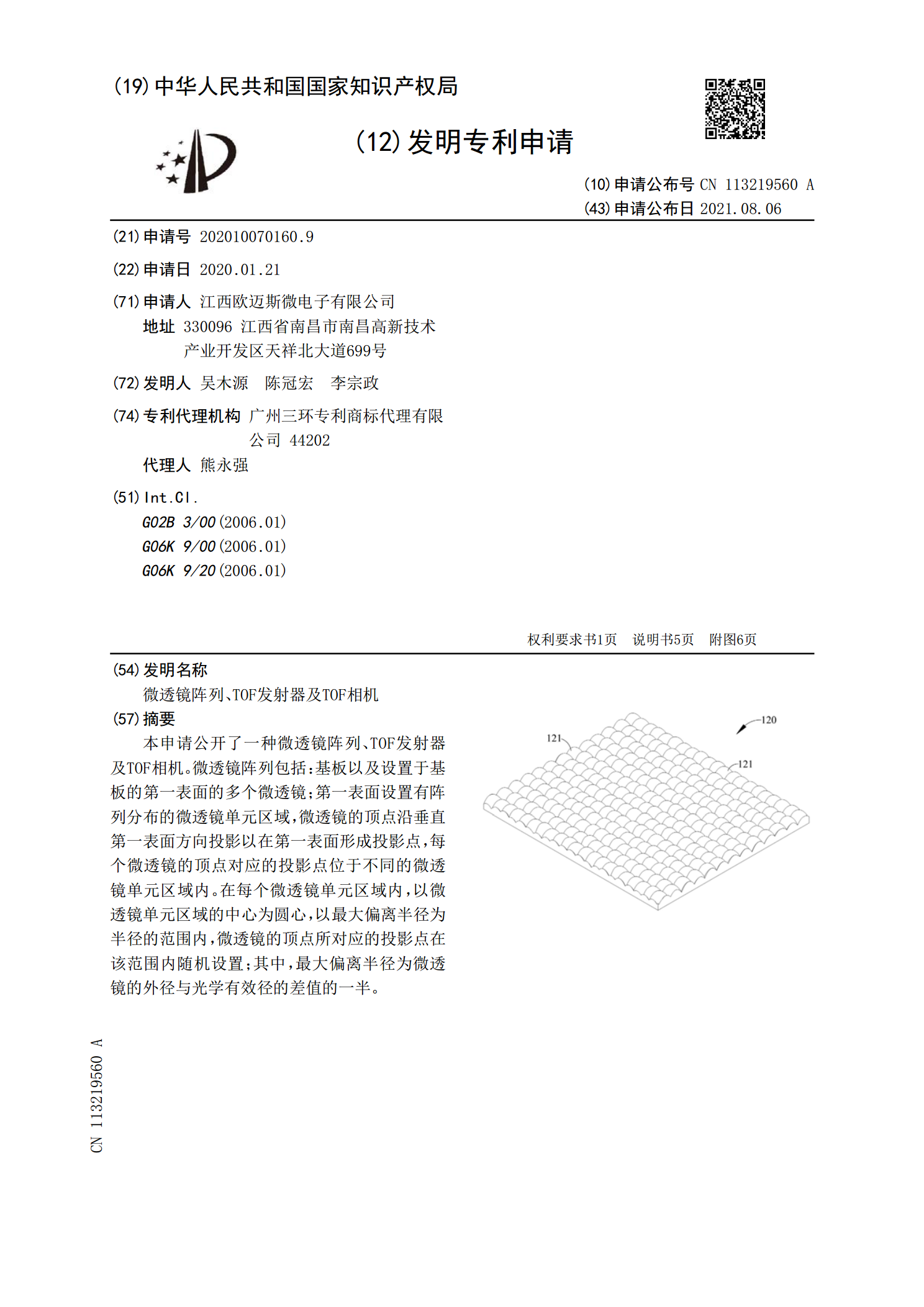
微透镜阵列、TOF发射器及TOF相机.pdf
本申请公开了一种微透镜阵列、TOF发射器及TOF相机。微透镜阵列包括:基板以及设置于基板的第一表面的多个微透镜;第一表面设置有阵列分布的微透镜单元区域,微透镜的顶点沿垂直第一表面方向投影以在第一表面形成投影点,每个微透镜的顶点对应的投影点位于不同的微透镜单元区域内。在每个微透镜单元区域内,以微透镜单元区域的中心为圆心,以最大偏离半径为半径的范围内,微透镜的顶点所对应的投影点在该范围内随机设置;其中,最大偏离半径为微透镜的外径与光学有效径的差值的一半。