
三维成像系统、三维成像方法、车载系统以及车辆.pdf

静芙****可爱


1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
三维成像系统、三维成像方法、车载系统以及车辆.pdf
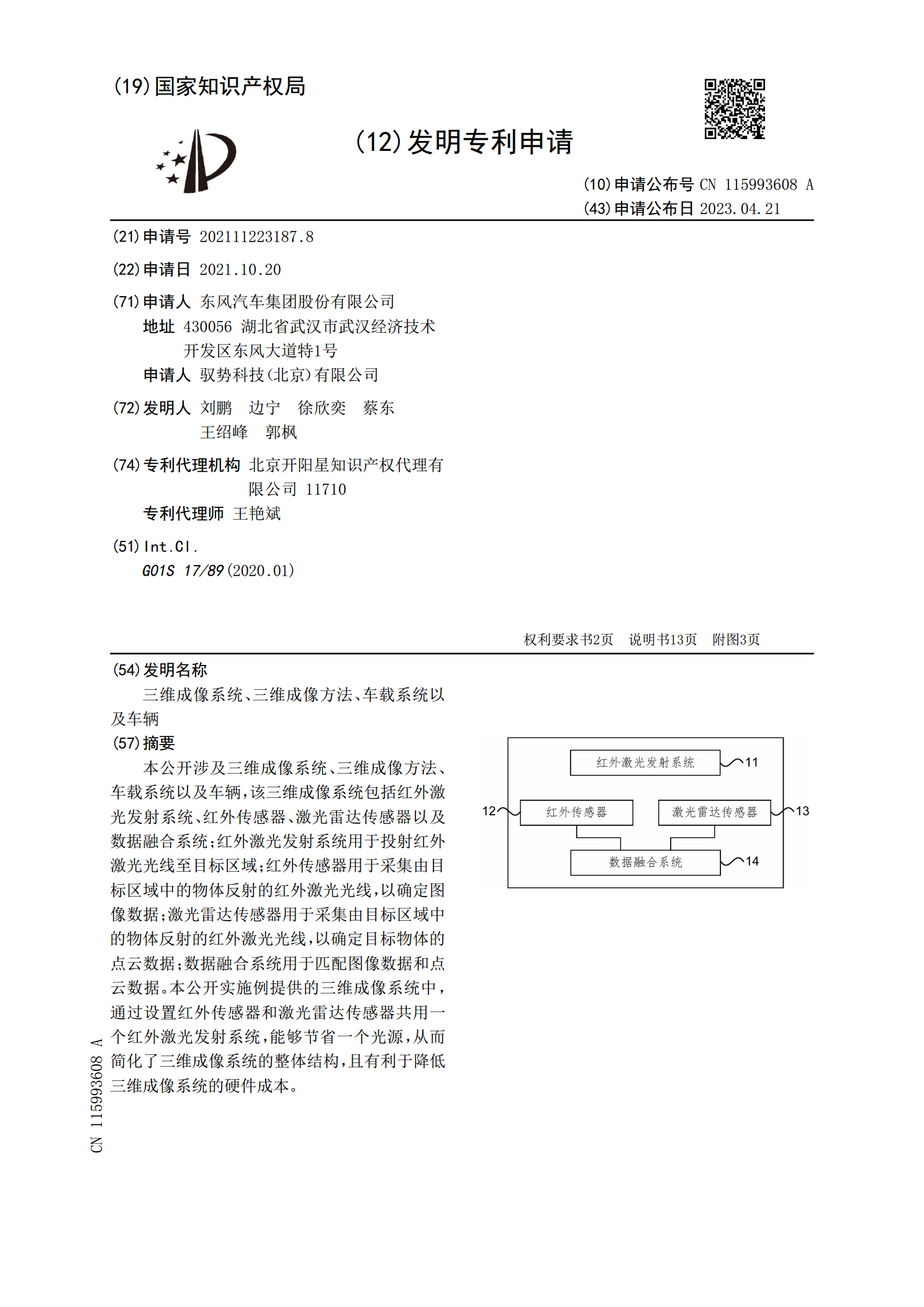
本公开涉及三维成像系统、三维成像方法、车载系统以及车辆,该三维成像系统包括红外激光发射系统、红外传感器、激光雷达传感器以及数据融合系统;红外激光发射系统用于投射红外激光光线至目标区域;红外传感器用于采集由目标区域中的物体反射的红外激光光线,以确定图像数据;激光雷达传感器用于采集由目标区域中的物体反射的红外激光光线,以确定目标物体的点云数据;数据融合系统用于匹配图像数据和点云数据。本公开实施例提供的三维成像系统中,通过设置红外传感器和激光雷达传感器共用一个红外激光发射系统,能够节省一个光源,从而简化了三维成
三维成像系统及成像方法.pdf
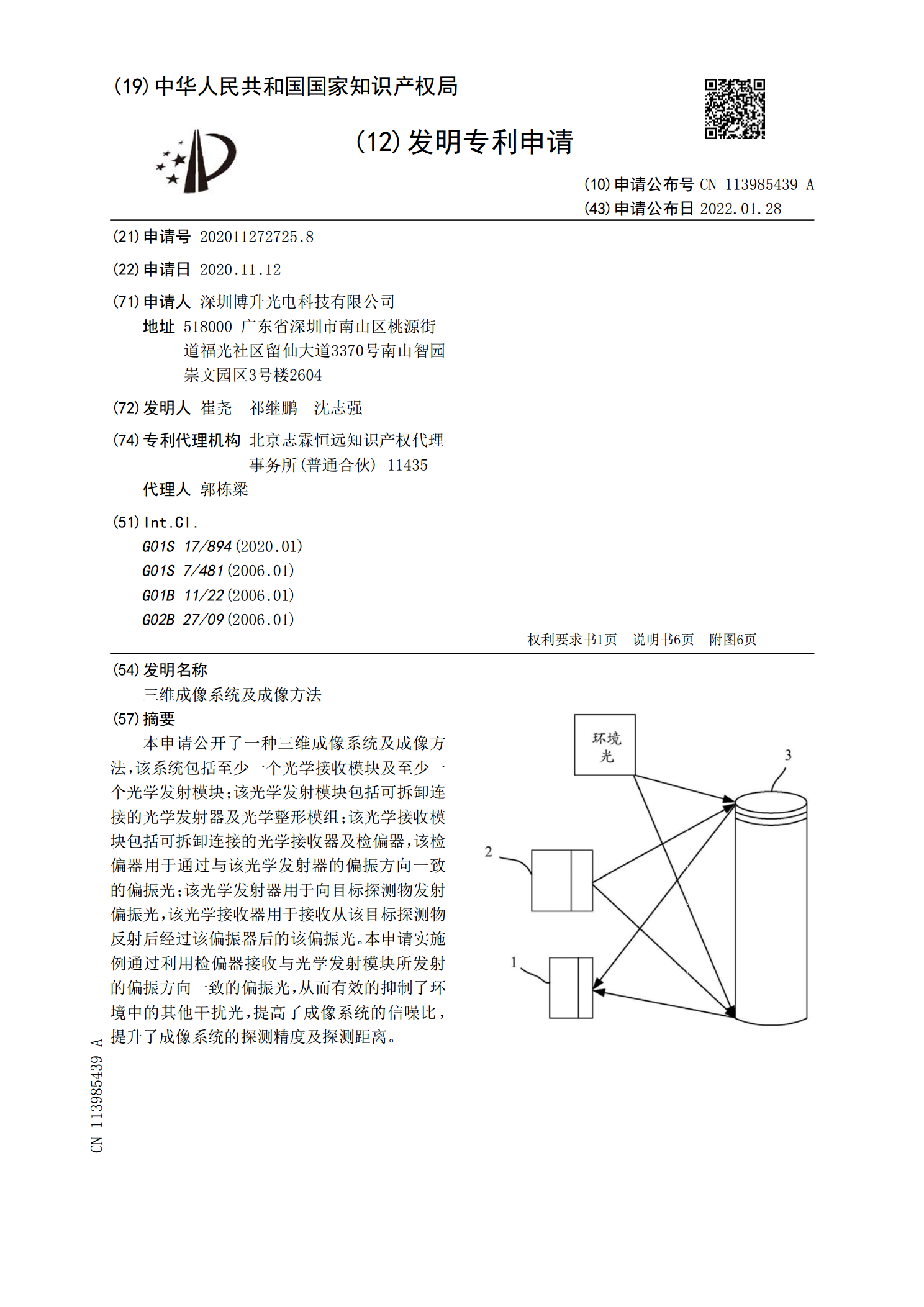
本申请公开了一种三维成像系统及成像方法,该系统包括至少一个光学接收模块及至少一个光学发射模块;该光学发射模块包括可拆卸连接的光学发射器及光学整形模组;该光学接收模块包括可拆卸连接的光学接收器及检偏器,该检偏器用于通过与该光学发射器的偏振方向一致的偏振光;该光学发射器用于向目标探测物发射偏振光,该光学接收器用于接收从该目标探测物反射后经过该偏振器后的该偏振光。本申请实施例通过利用检偏器接收与光学发射模块所发射的偏振方向一致的偏振光,从而有效的抑制了环境中的其他干扰光,提高了成像系统的信噪比,提升了成像系统的

三维成像系统及方法.pdf
本申请公开了一种三维成像系统,包括:光学发射器,向目标场景发射光脉冲;光学调制器,对至少一部分从光学发射器发射的光脉冲和/或从目标场景返回的光脉冲的光学状态进行调制;光学元件阵列,接收经调制的返回部分,其中,至少在光脉冲发射前的第一预设时间范围内和/或光脉冲发射后的第二预设时间范围内,光学元件阵列具有传输至少三个彼此不同光学状态的光的功能;光电探测器,包括成像透镜,接收通过光学元件阵列的光信号,并将所接收到的光信号转换为电信号;以及控制器,控制器通过电路向光学调制器施加控制,光学调制器基于控制将光脉冲的光

三维成像系统.pdf
本发明涉及三维成像系统。可选地,公开了用于执行对象的轮廓测定的硬件和软件配置。描述了有优势的成像装置。还描述了有优势的确定成像仪位置的方法。所描述的每一个方面都可以不依赖于其他方面来被使用。而且,该教导可以在包括速度测量等的其他领域中得到应用。

三维成像系统.pdf
可选地,公开了用于执行对象的轮廓测定的硬件和软件配置。描述了有优势的成像装置。还描述了有优势的确定成像仪位置的方法。所描述的每一个方面都可以不依赖于其他方面来被使用。而且,该教导可以在包括速度测量等的其他领域中得到应用。