
一种超冗余机械臂分段式动态避障方法.pdf

An****70

1/10
2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种超冗余机械臂分段式动态避障方法.pdf
本发明公开了一种超冗余机械臂分段式动态避障方法。首先,针对场景中的机械臂状态信息与观测到的障碍物信息,建立以机械臂为中心的动态障碍预警区域。其次,当障碍物进入该区域监测范围内,基于速度障碍策略构建碰撞风险评估模型,实时评估机械臂与障碍物间的碰撞可能性。再次,若存在碰撞风险,依据障碍物信息将机械臂划分为若干避障区域,构建局部避障速度约束、关节限位约束以及连杆长度约束,求解机械臂各关节安全速度集合。最后,通过前后向迭代逆运动学求解算法实时更新机械臂位姿,进而实现动态障碍场景下的超冗余机械臂分段式避障。本发明充

冗余机械臂动态避障规划的任务书.docx
冗余机械臂动态避障规划的任务书任务书一、项目背景和目标(200字)冗余机械臂动态避障规划是指在目标追踪或路径规划过程中,充分利用机械臂冗余自由度,通过动态避障算法,使机械臂在避免障碍物的同时,能够沿着指定路径高效地完成任务。目前,冗余机械臂广泛应用于工业自动化、航空航天、医疗机器人等领域。而动态避障规划技术的研究和应用,能够进一步提高机械臂的灵活性和智能化水平,为未来的人机协作提供更好的支持。本项目旨在开发一种高效的冗余机械臂动态避障规划算法,实现机械臂在动态环境中的自主避障能力。通过研究机械臂的运动规律
基于MIRRT*-Connect算法的智能仓储冗余机械臂动态避障运动规划方法.pdf
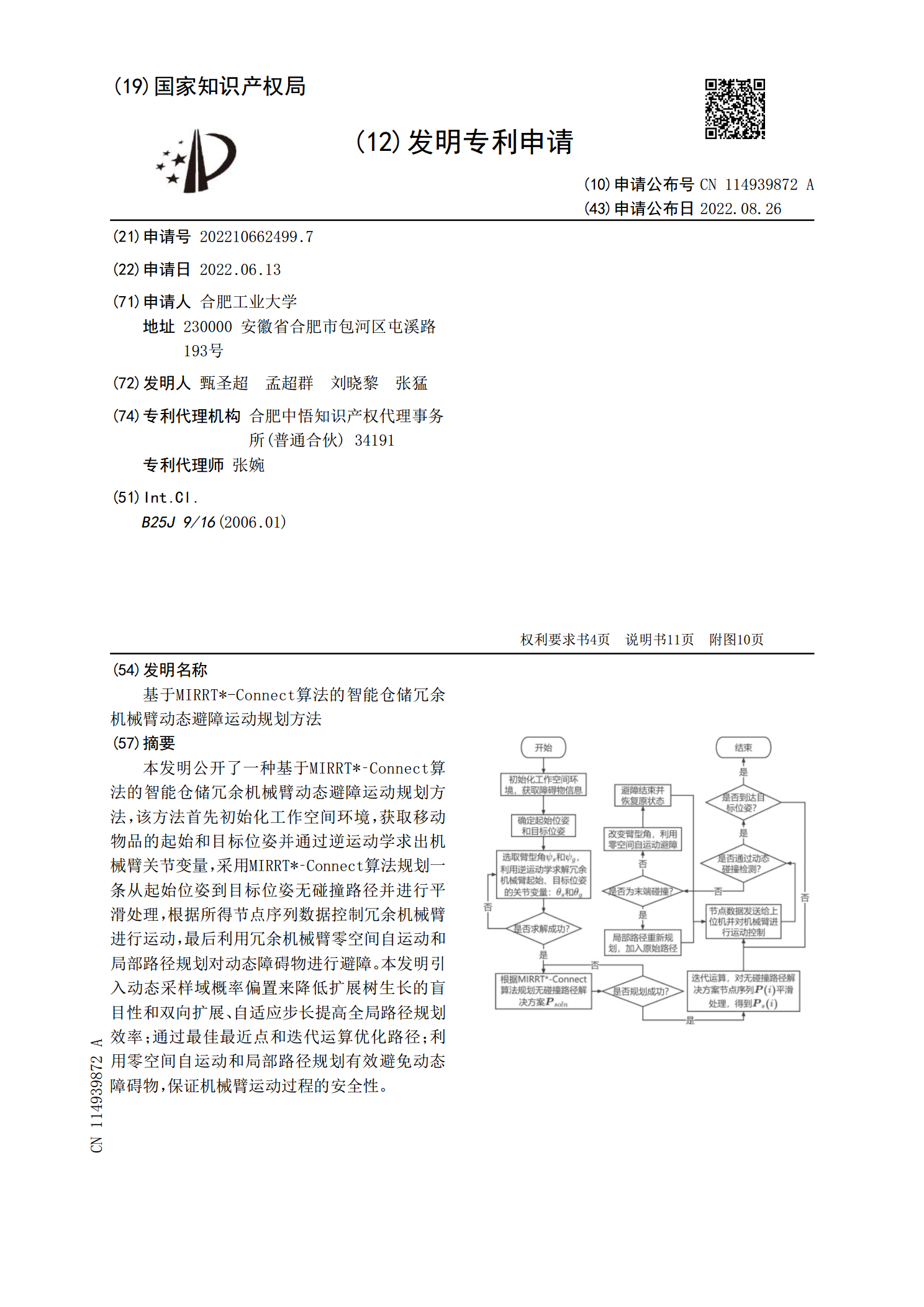
本发明公开了一种基于MIRRT*‑Connect算法的智能仓储冗余机械臂动态避障运动规划方法,该方法首先初始化工作空间环境,获取移动物品的起始和目标位姿并通过逆运动学求出机械臂关节变量,采用MIRRT*‑Connect算法规划一条从起始位姿到目标位姿无碰撞路径并进行平滑处理,根据所得节点序列数据控制冗余机械臂进行运动,最后利用冗余机械臂零空间自运动和局部路径规划对动态障碍物进行避障。本发明引入动态采样域概率偏置来降低扩展树生长的盲目性和双向扩展、自适应步长提高全局路径规划效率;通过最佳最近点和迭代运算优化

基于双目视觉的冗余机械臂动态避障运动规划研究.docx
基于双目视觉的冗余机械臂动态避障运动规划研究基于双目视觉的冗余机械臂动态避障运动规划研究摘要:随着机械臂在工业自动化和服务机器人等领域的广泛应用,动态避障成为关键技术之一。本文基于双目视觉,在冗余机械臂的运动规划过程中引入了动态避障算法,通过实时的障碍物检测和轨迹规划,实现了机械臂在复杂环境下的安全、高效移动。实验结果表明,本文提出的方法具有较好的效果和实用价值。关键词:双目视觉;冗余机械臂;动态避障;运动规划引言近年来,随着机械臂技术的快速发展,其在工业自动化、服务机器人、医疗护理等领域的应用日益广泛。
机械臂的避障方法及避障系统.pdf
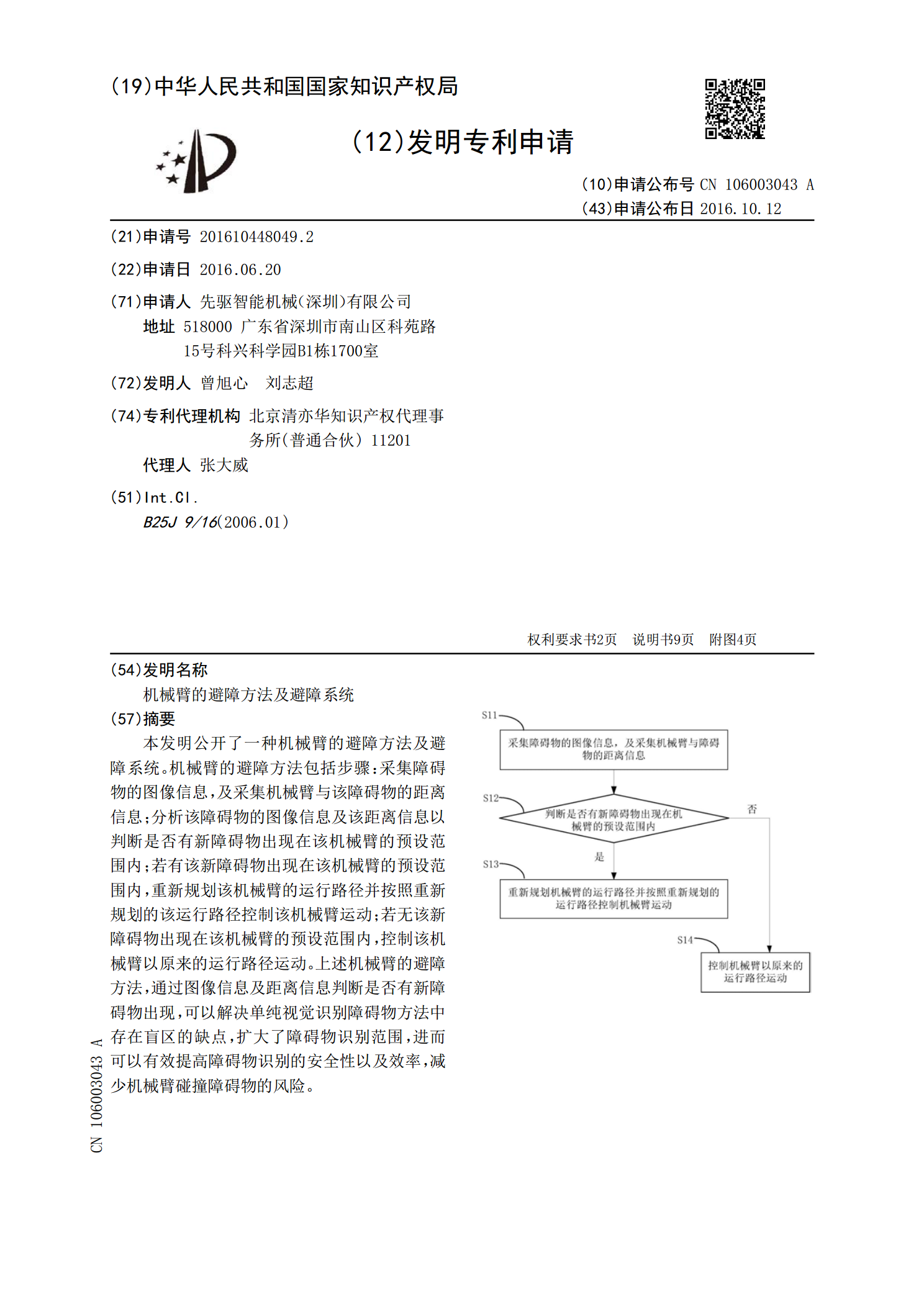
本发明公开了一种机械臂的避障方法及避障系统。机械臂的避障方法包括步骤:采集障碍物的图像信息,及采集机械臂与该障碍物的距离信息;分析该障碍物的图像信息及该距离信息以判断是否有新障碍物出现在该机械臂的预设范围内;若有该新障碍物出现在该机械臂的预设范围内,重新规划该机械臂的运行路径并按照重新规划的该运行路径控制该机械臂运动;若无该新障碍物出现在该机械臂的预设范围内,控制该机械臂以原来的运行路径运动。上述机械臂的避障方法,通过图像信息及距离信息判断是否有新障碍物出现,可以解决单纯视觉识别障碍物方法中存在盲区的缺点