
一种基于卫星地图的无人机虚拟观测图像生成及定位方法.pdf

森林****io


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于卫星地图的无人机虚拟观测图像生成及定位方法.pdf
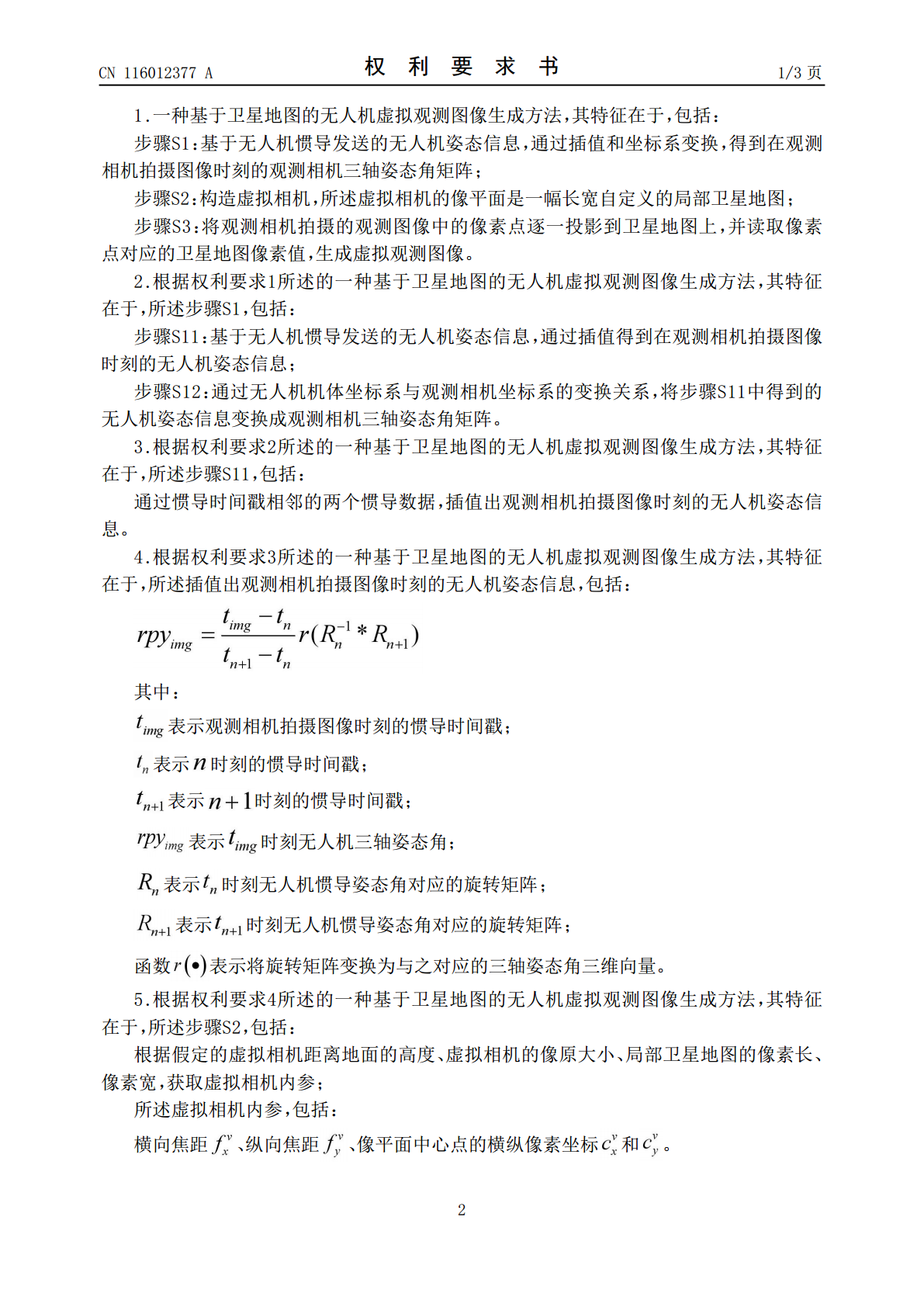
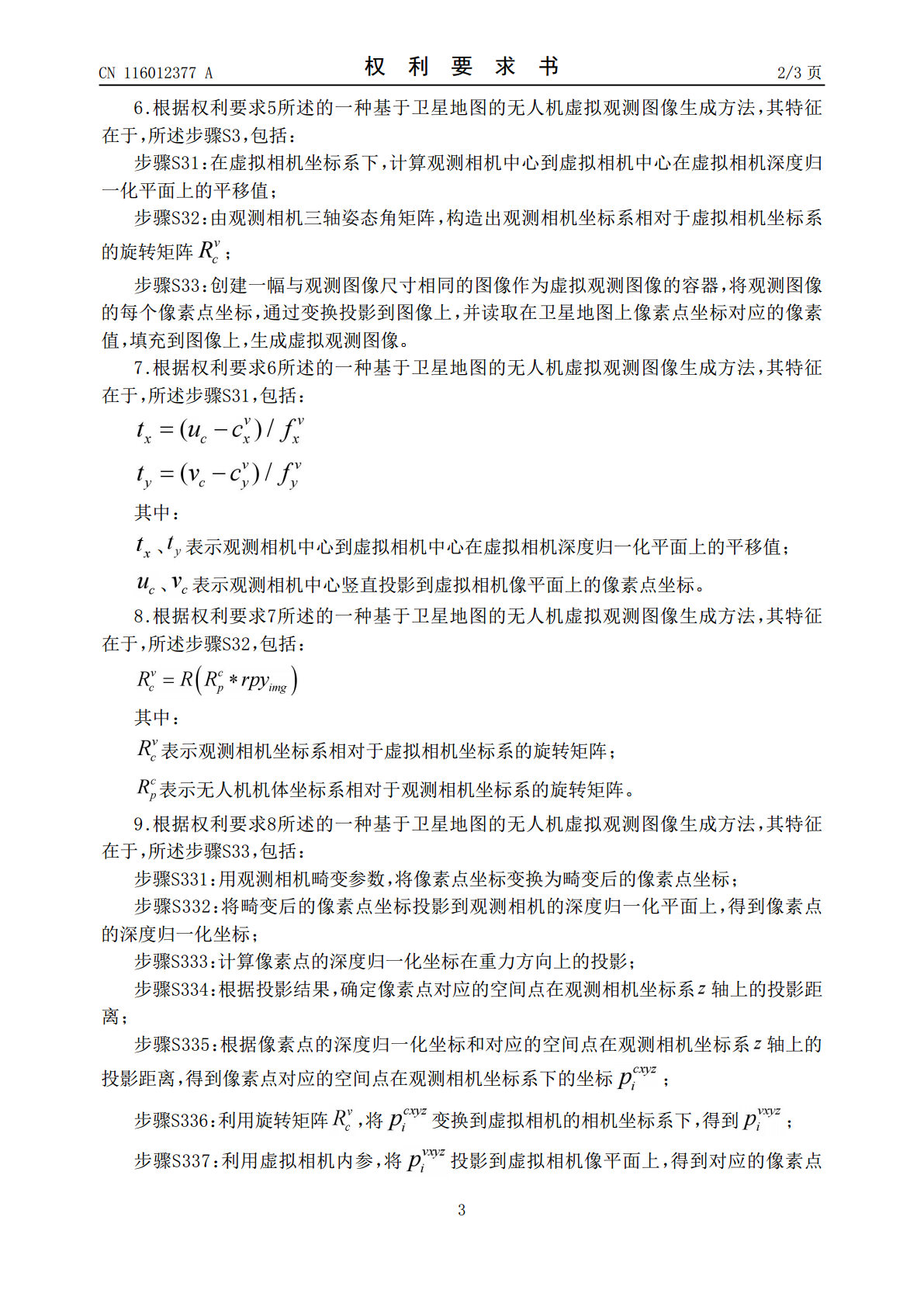
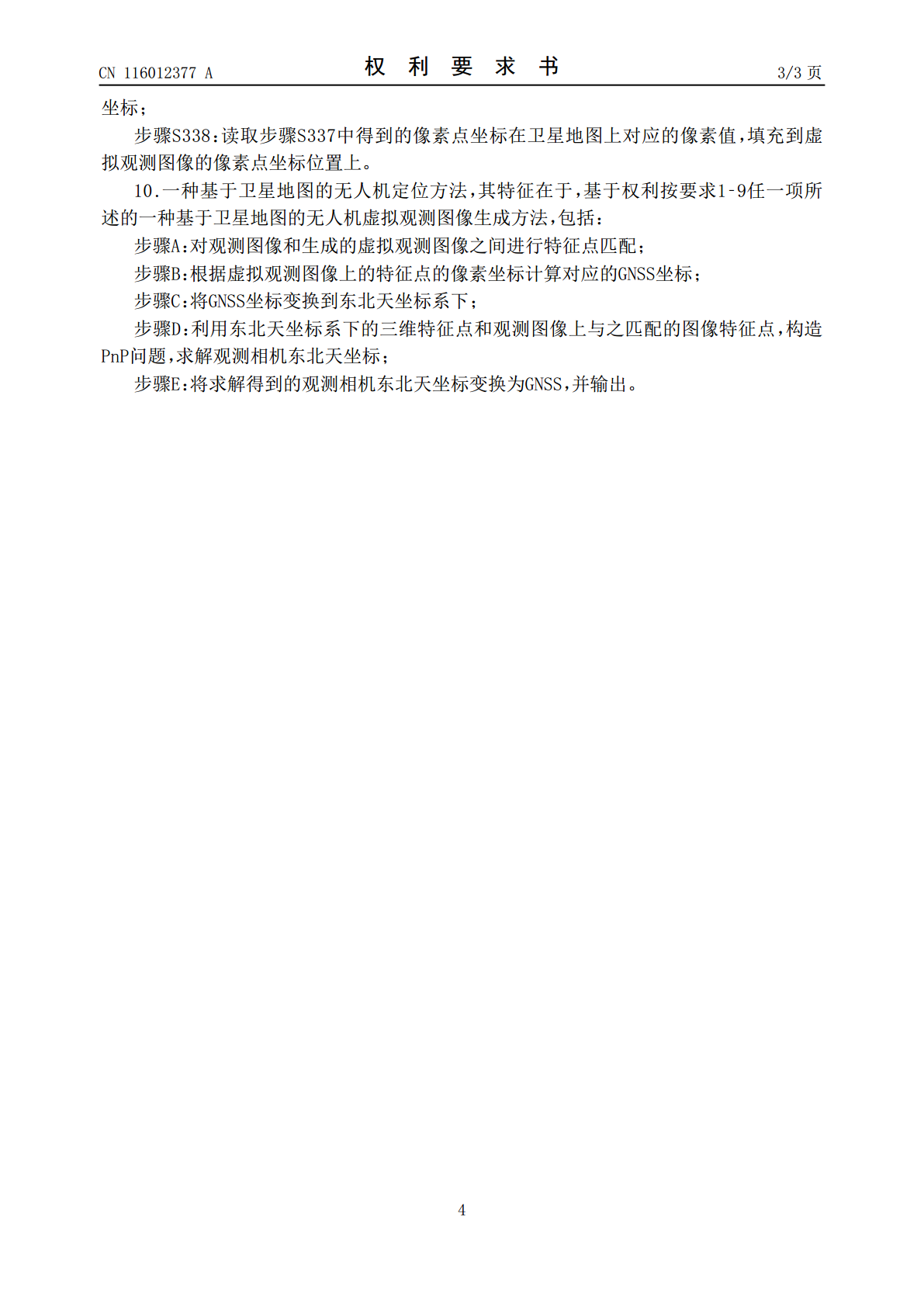
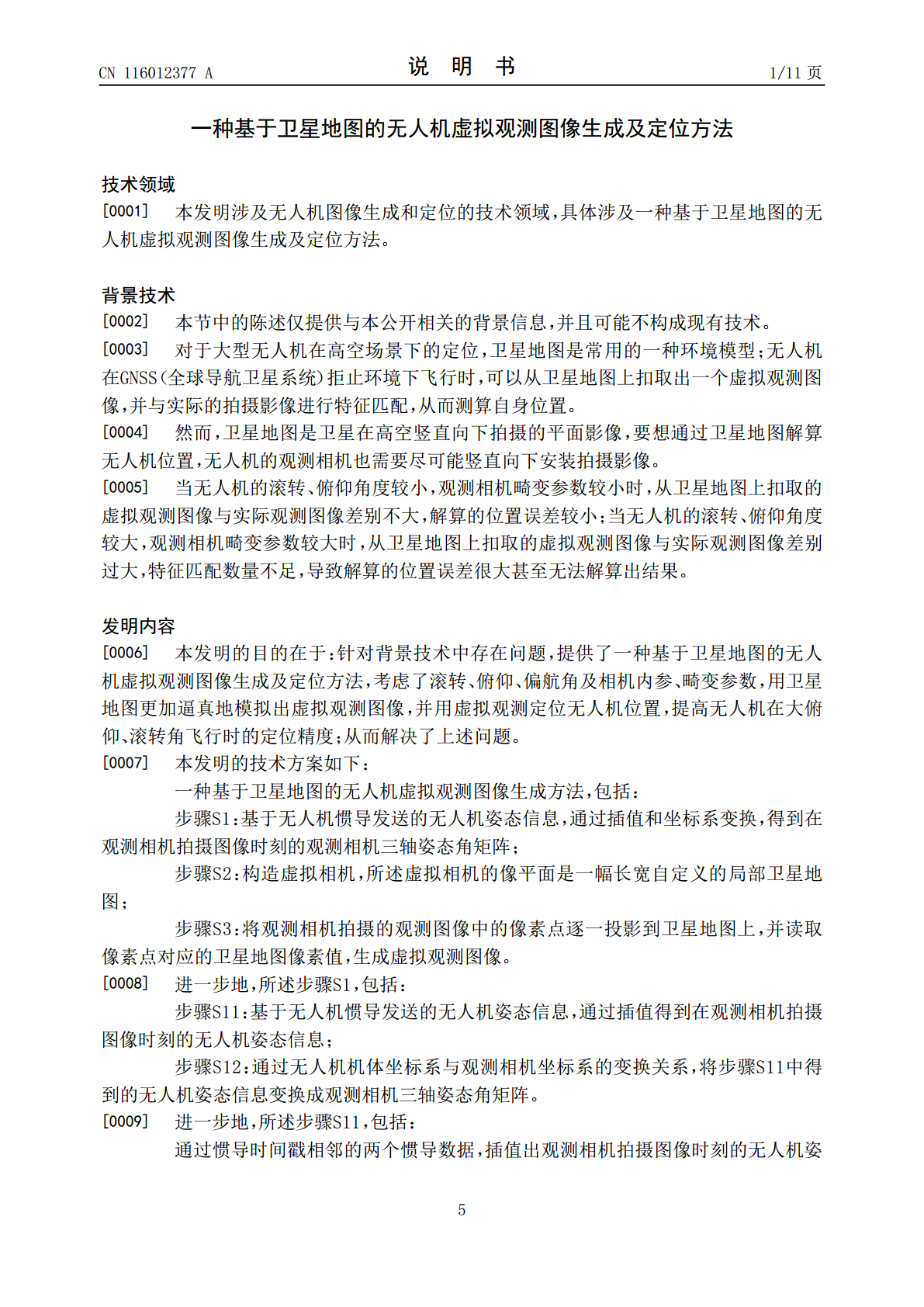
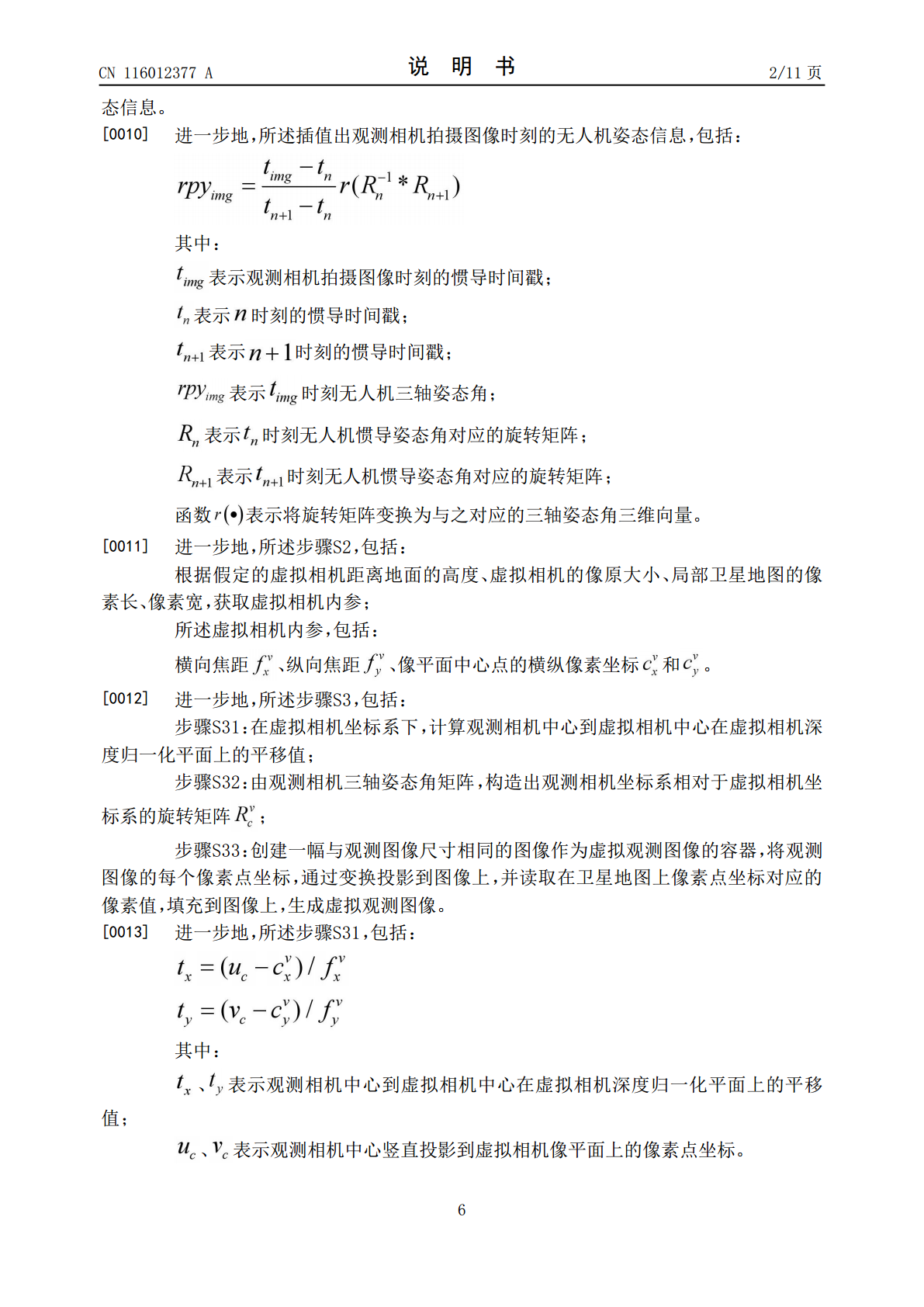
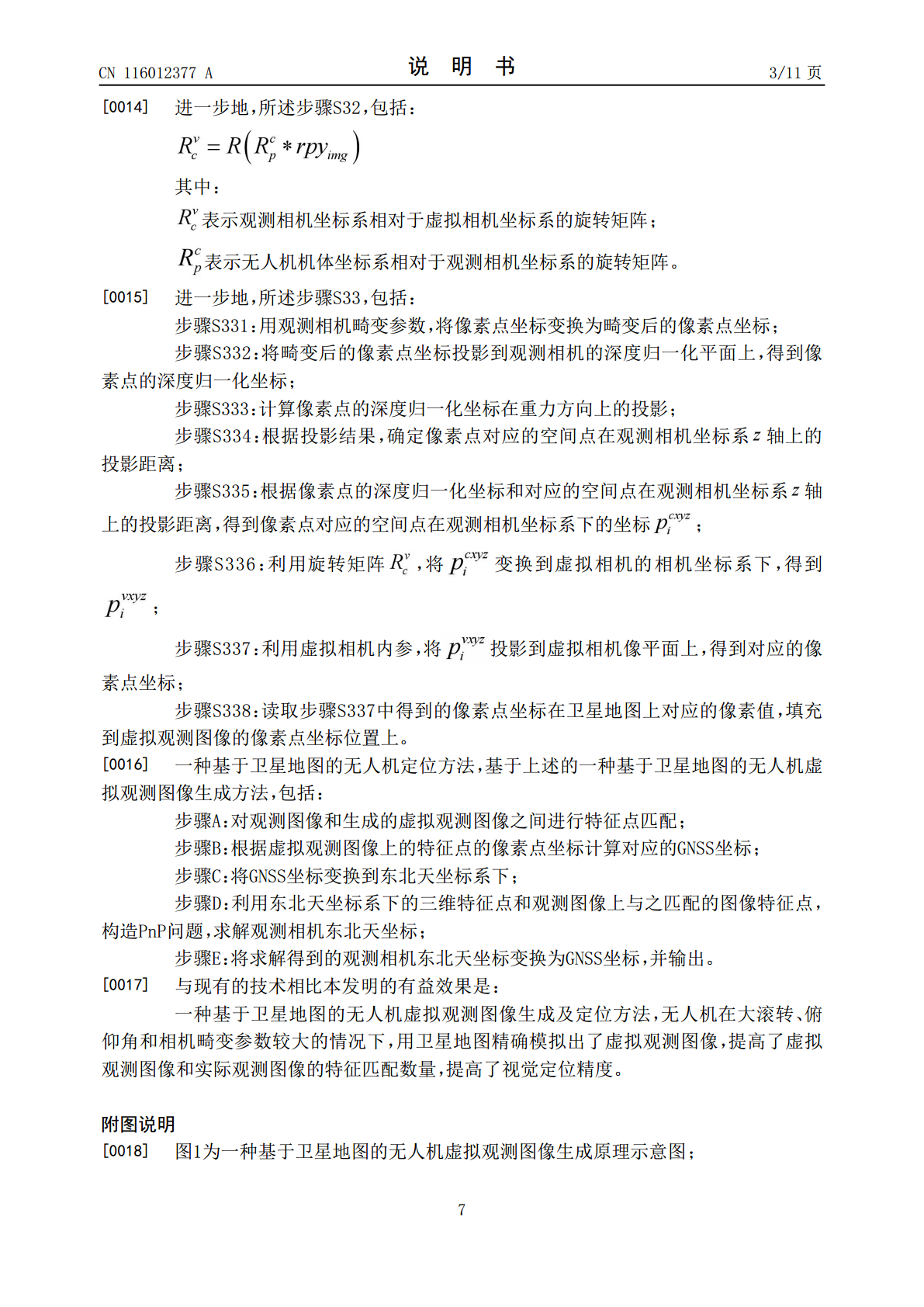
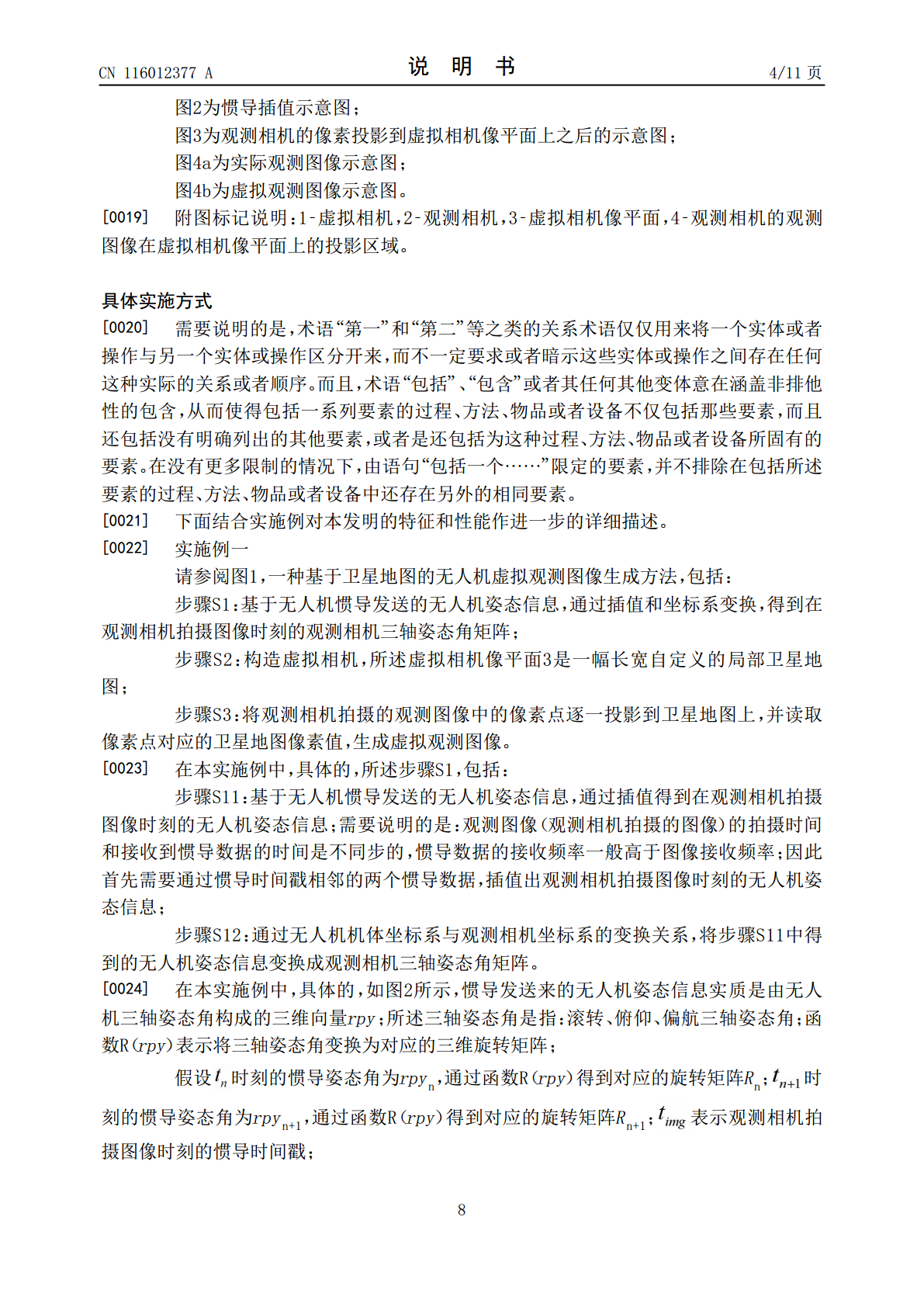
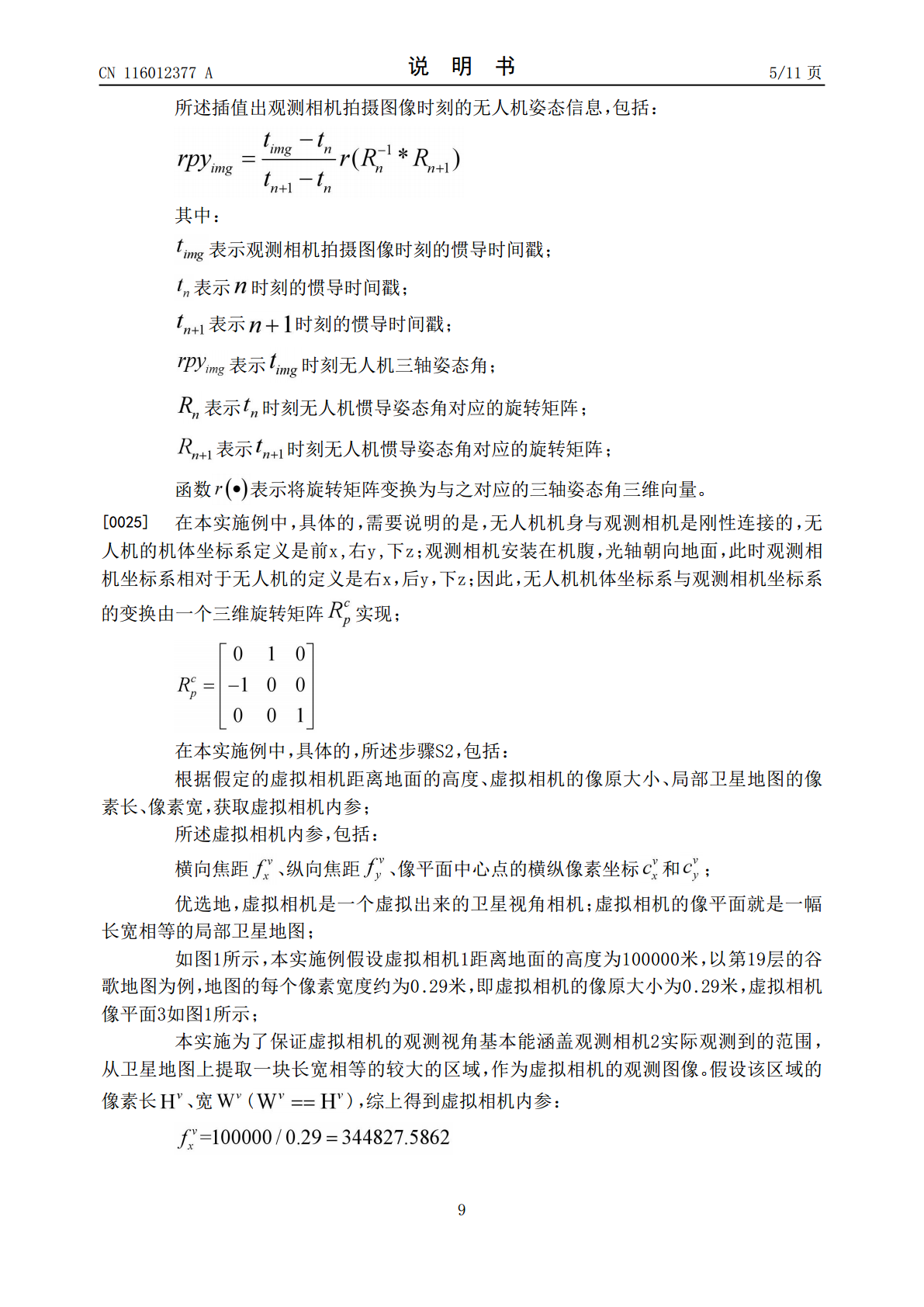
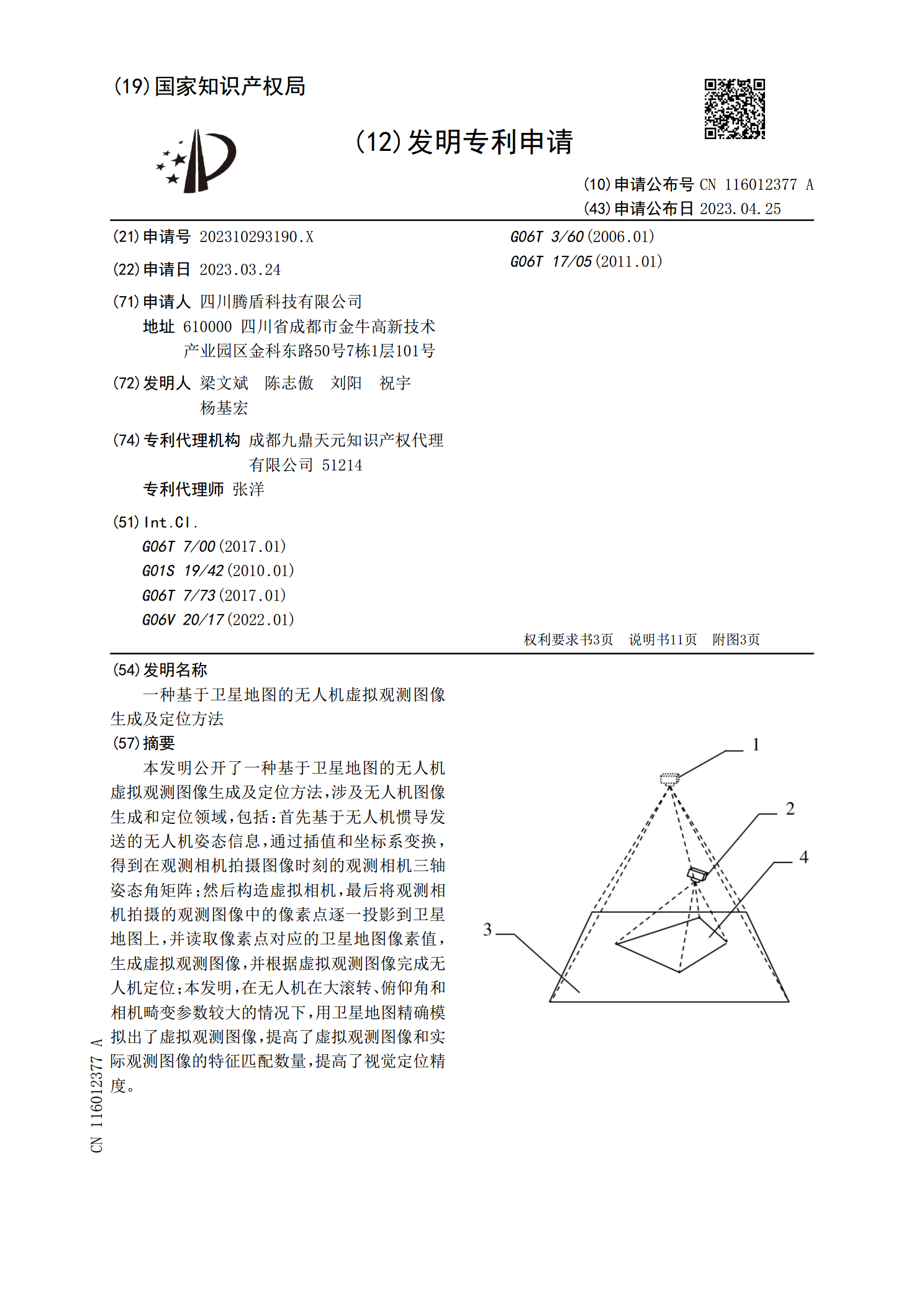
本发明公开了一种基于卫星地图的无人机虚拟观测图像生成及定位方法,涉及无人机图像生成和定位领域,包括:首先基于无人机惯导发送的无人机姿态信息,通过插值和坐标系变换,得到在观测相机拍摄图像时刻的观测相机三轴姿态角矩阵;然后构造虚拟相机,最后将观测相机拍摄的观测图像中的像素点逐一投影到卫星地图上,并读取像素点对应的卫星地图像素值,生成虚拟观测图像,并根据虚拟观测图像完成无人机定位;本发明,在无人机在大滚转、俯仰角和相机畸变参数较大的情况下,用卫星地图精确模拟出了虚拟观测图像,提高了虚拟观测图像和实际观测图像的特
一种基于卫星定位观测质量评估的虚拟应答器布局方法.pdf
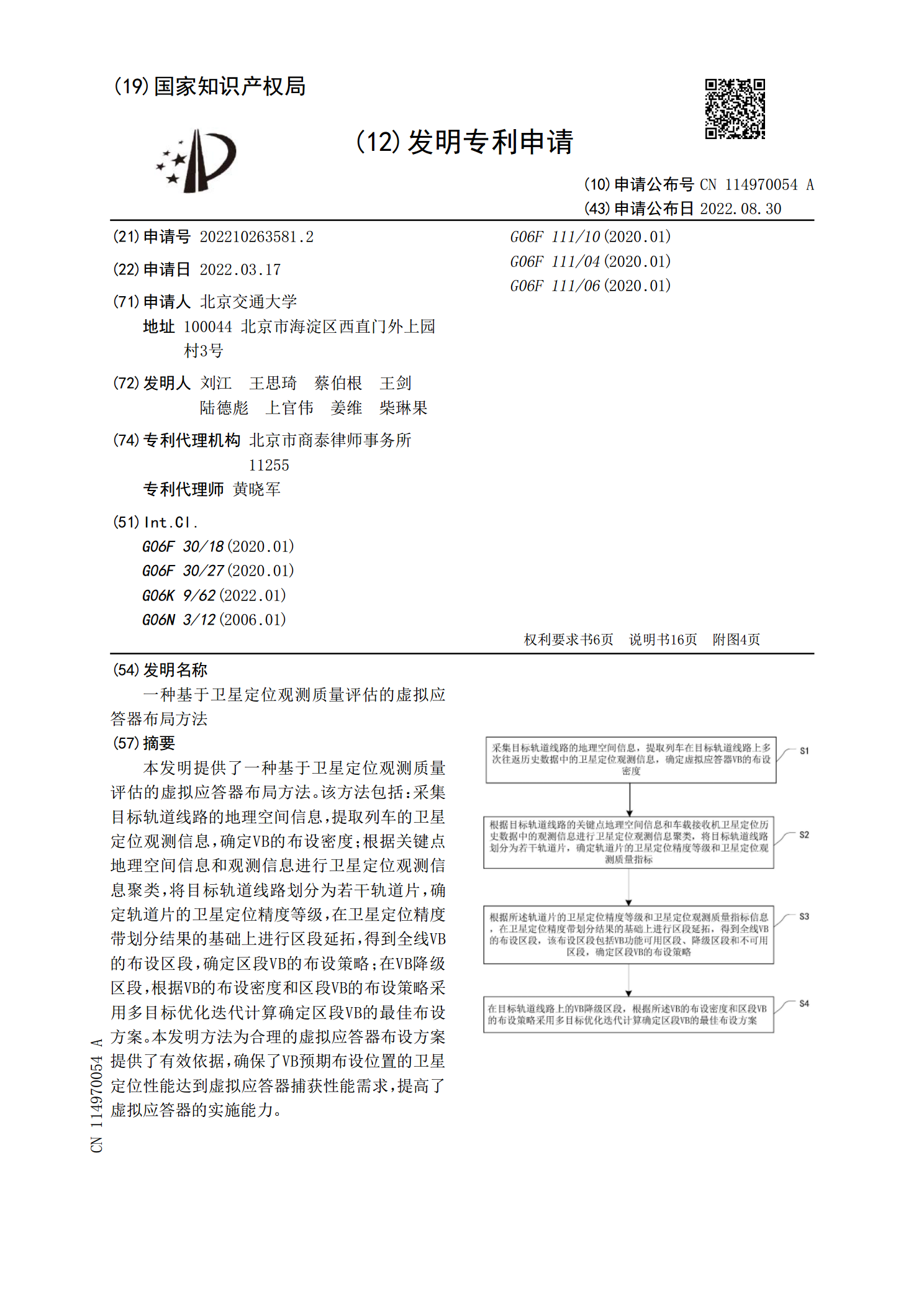
本发明提供了一种基于卫星定位观测质量评估的虚拟应答器布局方法。该方法包括:采集目标轨道线路的地理空间信息,提取列车的卫星定位观测信息,确定VB的布设密度;根据关键点地理空间信息和观测信息进行卫星定位观测信息聚类,将目标轨道线路划分为若干轨道片,确定轨道片的卫星定位精度等级,在卫星定位精度带划分结果的基础上进行区段延拓,得到全线VB的布设区段,确定区段VB的布设策略;在VB降级区段,根据VB的布设密度和区段VB的布设策略采用多目标优化迭代计算确定区段VB的最佳布设方案。本发明方法为合理的虚拟应答器布设方案提

一种基于卫星图像匹配的无人机自主定位算法.pptx
基于卫星图像匹配的无人机自主定位算法目录添加目录项标题算法概述算法背景算法原理算法流程算法特点卫星图像匹配技术图像匹配技术简介卫星图像匹配原理卫星图像匹配流程卫星图像匹配精度无人机自主定位技术无人机定位技术简介无人机定位原理无人机定位系统组成无人机定位精度算法实现与应用算法实现方式算法应用场景算法应用优势算法应用案例算法性能评估评估方法评估结果结果分析结果比较未来发展与展望算法改进方向技术发展趋势应用前景展望感谢观看
一种基于观测值外推的卫星定位方法和装置.pdf
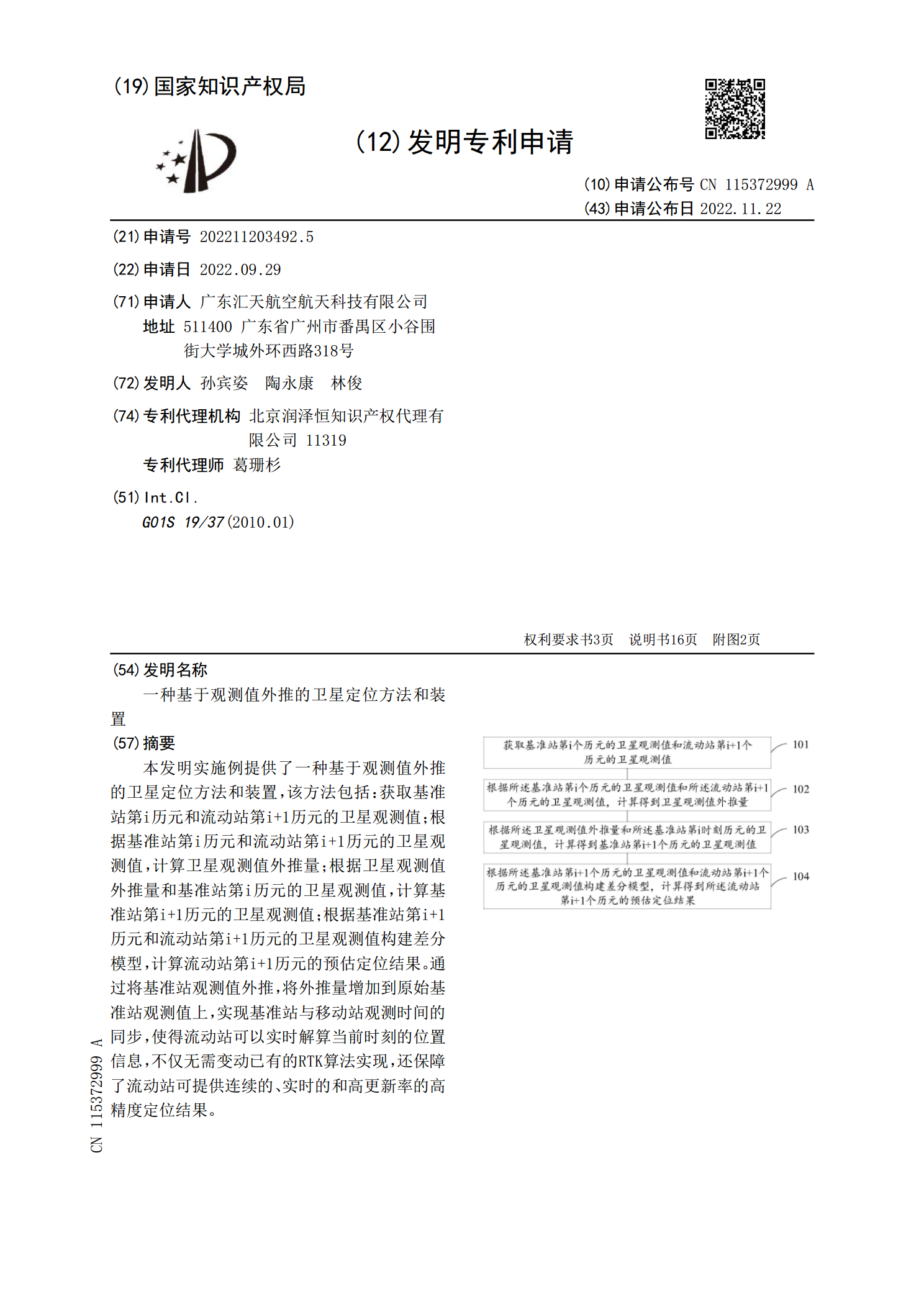
本发明实施例提供了一种基于观测值外推的卫星定位方法和装置,该方法包括:获取基准站第i历元和流动站第i+1历元的卫星观测值;根据基准站第i历元和流动站第i+1历元的卫星观测值,计算卫星观测值外推量;根据卫星观测值外推量和基准站第i历元的卫星观测值,计算基准站第i+1历元的卫星观测值;根据基准站第i+1历元和流动站第i+1历元的卫星观测值构建差分模型,计算流动站第i+1历元的预估定位结果。通过将基准站观测值外推,将外推量增加到原始基准站观测值上,实现基准站与移动站观测时间的同步,使得流动站可以实时解算当前时刻

基于GDAL的卫星图像仿真生成方法.docx
基于GDAL的卫星图像仿真生成方法基于GDAL的卫星图像仿真生成方法摘要:随着卫星技术的日益发展,卫星图像在地质、农业、环境等领域得到了广泛应用。卫星图像仿真生成方法可以帮助研究人员在没有实际卫星图像的情况下进行数据模拟和算法验证。本文基于GDAL(GeospatialDataAbstractionLibrary)介绍了一种基于GDAL的卫星图像仿真生成方法,包括数据预处理、图像合成和后处理三个步骤。实验证明,该方法可以生成逼真的卫星图像,有助于研究人员开展相关工作。1.引言卫星图像是一种重要的无人遥感数