
旋转机械时变多分量信号的时频分析方法.pdf

书生****写意

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
旋转机械时变多分量信号的时频分析方法.pdf
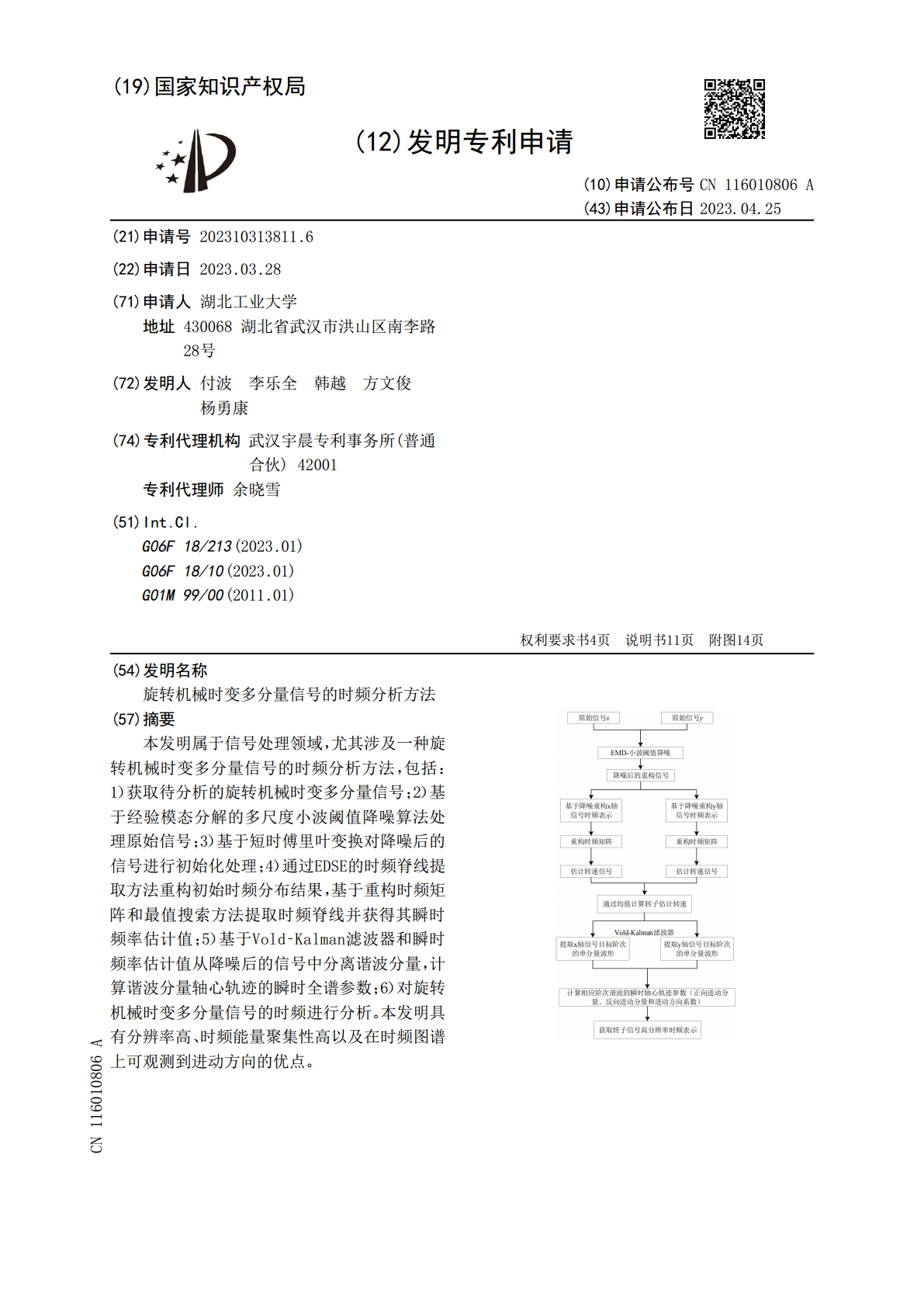
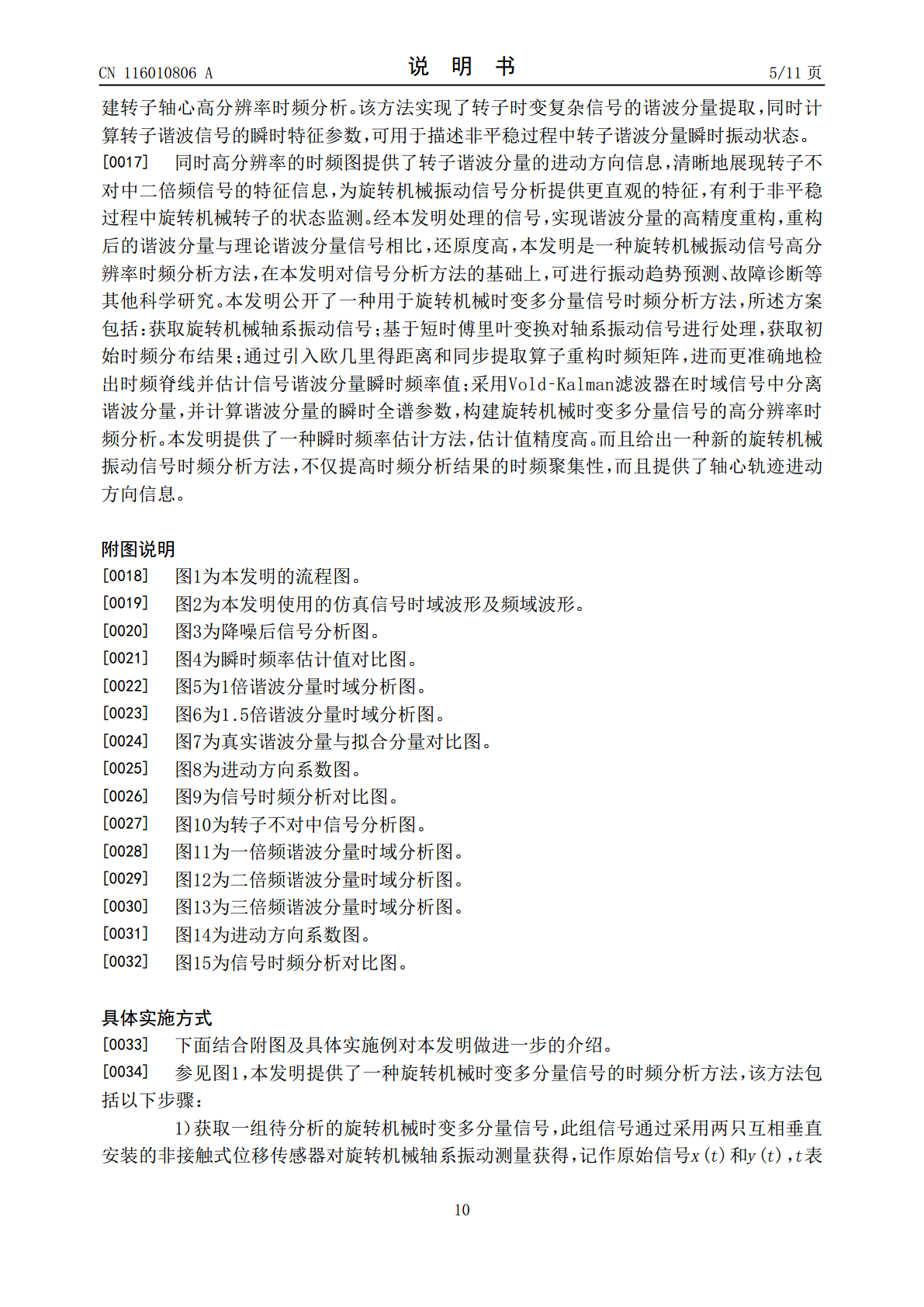
本发明属于信号处理领域,尤其涉及一种旋转机械时变多分量信号的时频分析方法,包括:1)获取待分析的旋转机械时变多分量信号;2)基于经验模态分解的多尺度小波阈值降噪算法处理原始信号;3)基于短时傅里叶变换对降噪后的信号进行初始化处理;4)通过EDSE的时频脊线提取方法重构初始时频分布结果,基于重构时频矩阵和最值搜索方法提取时频脊线并获得其瞬时频率估计值;5)基于Vold‑Kalman滤波器和瞬时频率估计值从降噪后的信号中分离谐波分量,计算谐波分量轴心轨迹的瞬时全谱参数;6)对旋转机械时变多分量信号的时频进行分

多分量非平稳信号的时频分析方法研究的开题报告.docx
多分量非平稳信号的时频分析方法研究的开题报告一、研究背景在信号处理中,时频分析是一种常用的信号分析和处理方法。简单来说,时频分析可以将信号在时间轴上与频率轴上进行分析,帮助我们更好的理解和分析信号在时间和频率上的变化规律。然而,很多实际的信号是多分量非平稳的,即这些信号的组成部分在时间和频率上均会发生变化,这为时频分析带来了挑战。因此,多分量非平稳信号的时频分析方法研究具有非常重要的理论和实际意义。二、研究内容本研究主要探讨多分量非平稳信号的时频分析方法,并在此基础上开展相关算法的研究和分析。具体而言,本

《信号时频分析》.ppt
信号时频分析增加取样长度提高分析精度的实例时变信号的特点增加采样长度对时变信号DFT分析的结果时变信号的分析方法10.1时频分析中的基本概念时域局域化指标频域局域化指标不确定性原理谱密度的非相加性瞬时频率和复信号解析信号多分量信号短时相关和时变谱10.2连续短时傅里叶变换STFT变换的图解过程连续STFT变换的频域定义连续STFT变换的时频分析过程连续STFT变换的特殊情形连续STFT逆变换连续STFT变换分析10.3序列信号的短时傅里叶变换序列信号的STFT逆变换从滤波角度分析序列STFT变换不同频率处

一种改进多分量LFM信号时频分布估计方法.docx
一种改进多分量LFM信号时频分布估计方法标题:一种改进的多分量LFM信号时频分布估计方法摘要:时频分布估计是信号处理中一项重要的任务,尤其在雷达、通信和生物医学领域中应用广泛。多分量线性调频(LFM)信号是一种常见的信号形式,其时频分布分析对于信号检测、跟踪和定位等应用具有重要意义。本论文提出了一种改进的多分量LFM信号时频分布估计方法,通过优化自适应算法来提高估计精度和减小估计误差。关键词:时频分布估计,多分量LFM信号,自适应算法,估计精度优化,估计误差减小引言:时频分布分析是信号处理领域中关键的技术

基于时频重排与WHT的多分量LFM信号识别.docx
基于时频重排与WHT的多分量LFM信号识别一、前言随着信息技术的飞速发展,信号处理的技术也日新月异,信号处理相关的识别和定位成为越来越重要的领域。多分量LFM(LinearFrequencyModulation)信号指的是带有多个不同斜率的LFM信号,这种信号是在雷达通信、电子侦听等领域中十分常见的信号,在进行信号识别的过程中,需要对信号进行预处理以提高信号的可识别性。本文提出一种基于时频重排和WHT(高效Walsh-Hadamard变换)的多分量LFM信号的识别算法,该算法可以对多分量LFM信号进行时频