
基于DCBGA的异构无人机集群ACK构建方法、系统和设备.pdf

岚风****55


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于DCBGA的异构无人机集群ACK构建方法、系统和设备.pdf
本申请涉及基于DCBGA的异构无人机集群ACK构建方法、系统和设备,该方法包括:将动态对抗环境下的整体任务流程划分为离散的时间序列并确定各时间步长;在当前时间步长内异构无人机集群中各无人机利用构建的DCBGA模型进行目标选择;在当前时间步长内各无人机利用DCBGA模型进行一致性过程;在当前时间步长内的目标选择和一致性过程完成轮次达到设定轮数时,各无人机完成各自本地信息的更新、自身任务执行状态和运动状态的切换并进入下一个时间步长;跟随每一时间步长的目标选择和一致性过程,输出并更新构建的异构无人机集群的ACK

异构无人机集群动态自适应组网方法、系统和设备.pdf
本申请涉及异构无人机集群动态自适应组网方法、系统和设备,该方法包括:构建静态通信受限条件下的异构无人机集群无标度特性的通信网络;根据当前的通信网络中各节点的位置坐标,分别更新各节点的邻居节点集并分别计算各节点与相连节点集中节点的节点距离;将节点距离超过通信距离的相连节点集中的节点判定为失效节点并从相连节点集中剔除;基于MOLLY‑REED准则的自适应动作的启动条件,根据节点连接概率函数及距离影响函数对通信网络中的节点进行动态自适应组网。高效实现了无人机集群网络拓扑结构的动态自适应,显著提高了无人机集群的控

一种基于异构存储的集群仲裁的方法、系统、设备及介质.pdf
本发明公开了一种基于异构存储的集群仲裁的方法、系统、设备和存储介质,方法包括:在集群中的每两个相邻的节点之间设置心跳;响应于存在节点之间的心跳断开,基于断开的心跳将集群中的节点分成多个子集群,并判断节点数量最多的子集群是否唯一;响应于节点数量最多的子集群不唯一,在每个节点数量最多的子集群中选择一个节点同时向第三方存储逻辑卷发送预留请求;响应于存在节点预留成功,判断第三方存储逻辑卷中的仲裁数据是否有效;以及响应于第三方存储逻辑卷中的仲裁数据无效,将预留成功的节点的仲裁信息写入第三方存储逻辑卷以使该节点的子集

一种基于协商机制的无人机集群构建方法.pdf
本发明涉及一种基于协商机制的无人机集群构建方法,方法包括:S10第一类无人机根据自身信息和感知的外部信息确定用于组建指定用途的无人机族的组建信息及信息发布时刻;S20第一类无人机在所述信息发布时刻向无人机集群发布所述组建信息;S30第一类无人机接收到至少一个第二类无人机反馈的所述组建信息的响应,则采用类招聘方式与该第二类无人机交互,获得加入无人机族的所有第二类无人机;S40第一类无人机和加入无人机族的所有第二类无人机基于信息浓度竞选策略确定该无人机族的族中心,进而获得无人机集群中的多个无人机族。上述方法可
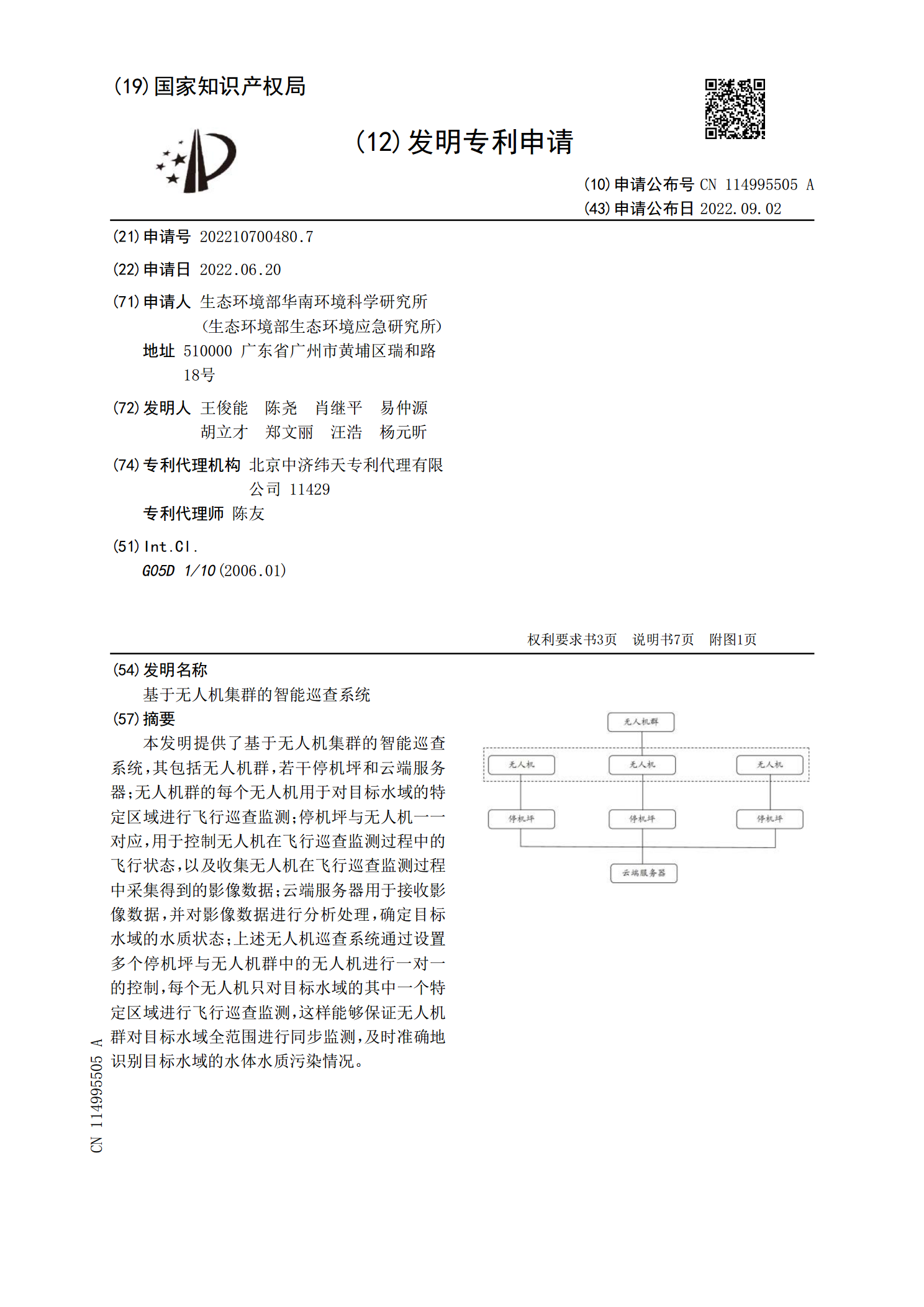
基于无人机集群的智能巡查系统.pdf
本发明提供了基于无人机集群的智能巡查系统,其包括无人机群,若干停机坪和云端服务器;无人机群的每个无人机用于对目标水域的特定区域进行飞行巡查监测;停机坪与无人机一一对应,用于控制无人机在飞行巡查监测过程中的飞行状态,以及收集无人机在飞行巡查监测过程中采集得到的影像数据;云端服务器用于接收影像数据,并对影像数据进行分析处理,确定目标水域的水质状态;上述无人机巡查系统通过设置多个停机坪与无人机群中的无人机进行一对一的控制,每个无人机只对目标水域的其中一个特定区域进行飞行巡查监测,这样能够保证无人机群对目标水域全