
一种风洞模型俯仰、侧滑和滚转角远程操控的试验装置.pdf

小忆****ng

1/9
2/9
3/9

4/9

5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种风洞模型俯仰、侧滑和滚转角远程操控的试验装置.pdf
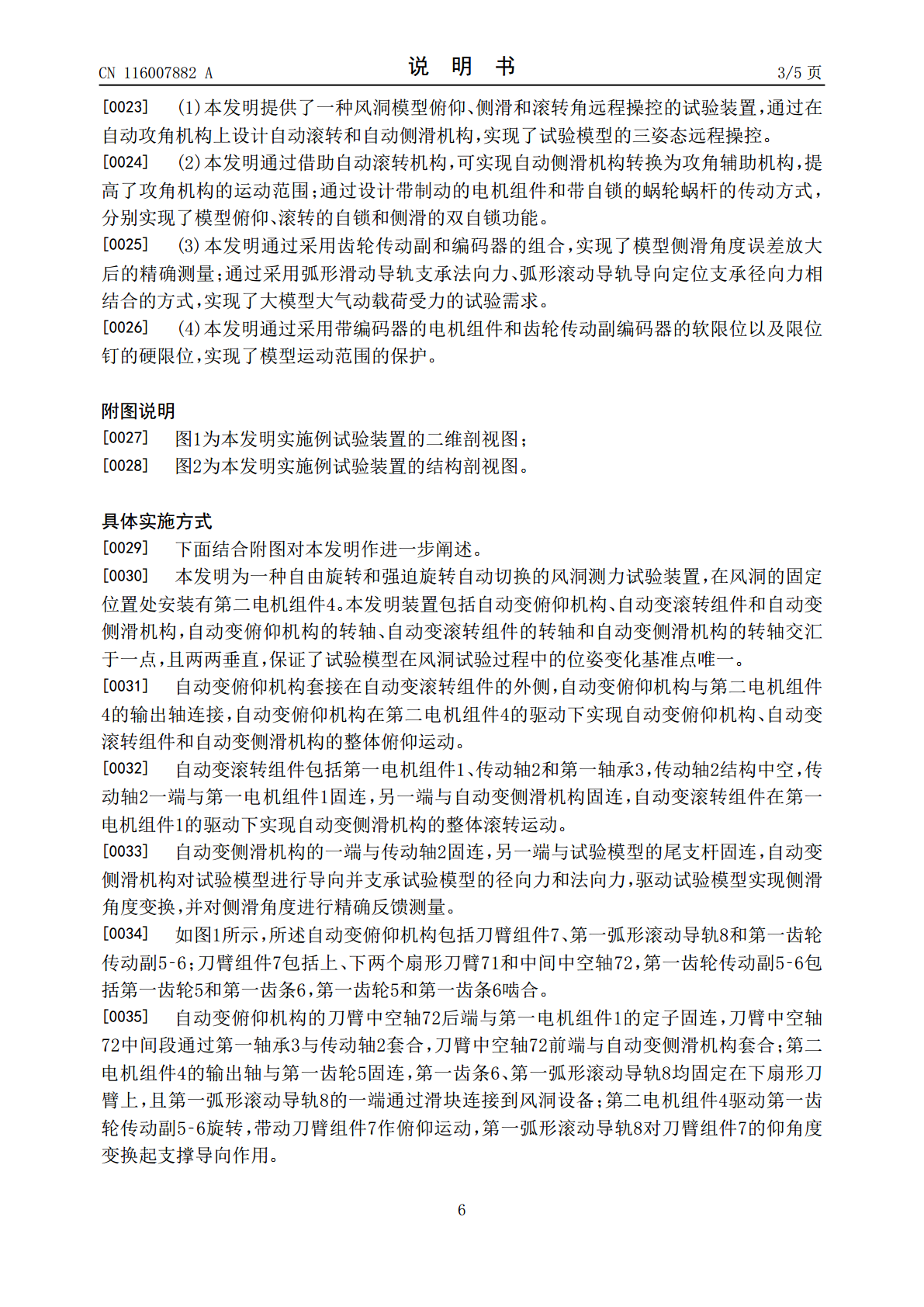
本发明涉及一种风洞模型俯仰、侧滑和滚转角远程操控的试验装置,包括自动变俯仰机构、自动变滚转组件和自动变侧滑机构,自动变俯仰机构在第二电机组件的驱动下实现刀臂、自动变滚转组件和自动变侧滑机构的整体俯仰运动。传动轴分别与第一电机组件的转子和支臂的圆柱段固连,在第一电机组件的驱动下实现支臂整体滚转运动。自动变侧滑机构一端与传动轴固连,另一端与试验模型的尾支杆固连,对试验模型进行导向并支承径向力和法向力,驱动试验模型实现侧滑角度变换,并对侧滑角度进行精确反馈测量。本发明实现了试验模型在风洞试验过程中的俯仰、偏航和

一种立式风洞模型俯仰-翻滚试验装置及使用方法.pdf
本发明适用于风洞试验技术领域,提供了一种立式风洞模型俯仰‑翻滚试验装置及使用方法,其中所述试验装置包括:底座,所述底座固定安装于立式风洞试验段洞壁平台上;立柱,所述立柱的底端与底座固定连接;支撑杆,所述支撑杆位于所述立柱和腹撑弯杆之间,所述支撑杆一端与所述立柱的顶端固定连接,另一端通过转动组件与所述腹撑弯杆的一端连接,所述转动组件,安装于所述支撑杆远离所述立柱的一端;所述腹撑弯杆,在远离转动组件的一端与安装座固定连接,所述安装座固定安装于飞行器模型的腹部。通过本发能够实现飞机模型在空气动力的作用下的自由俯
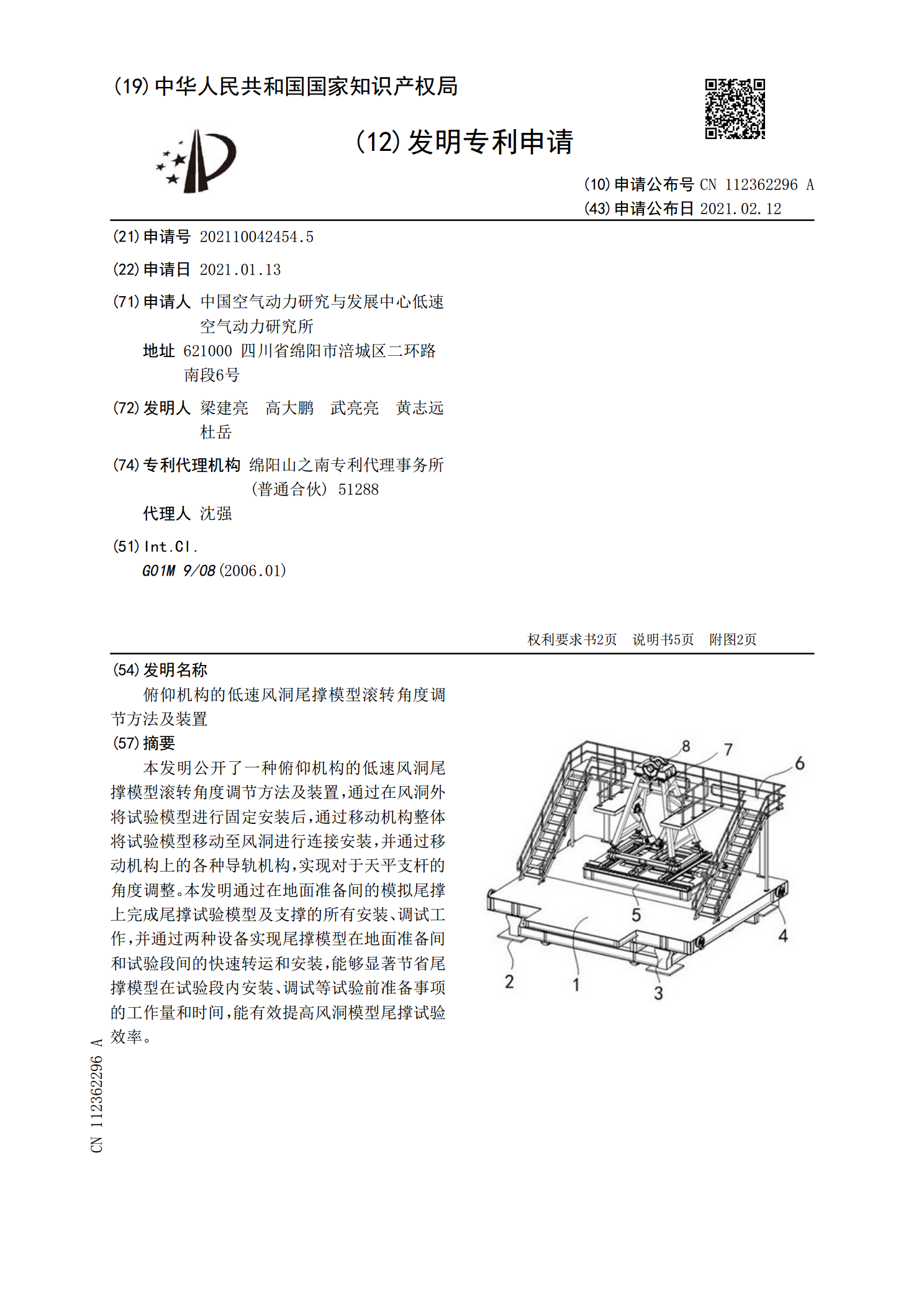
俯仰机构的低速风洞尾撑模型滚转角度调节方法及装置.pdf
本发明公开了一种俯仰机构的低速风洞尾撑模型滚转角度调节方法及装置,通过在风洞外将试验模型进行固定安装后,通过移动机构整体将试验模型移动至风洞进行连接安装,并通过移动机构上的各种导轨机构,实现对于天平支杆的角度调整。本发明通过在地面准备间的模拟尾撑上完成尾撑试验模型及支撑的所有安装、调试工作,并通过两种设备实现尾撑模型在地面准备间和试验段间的快速转运和安装,能够显著节省尾撑模型在试验段内安装、调试等试验前准备事项的工作量和时间,能有效提高风洞模型尾撑试验效率。
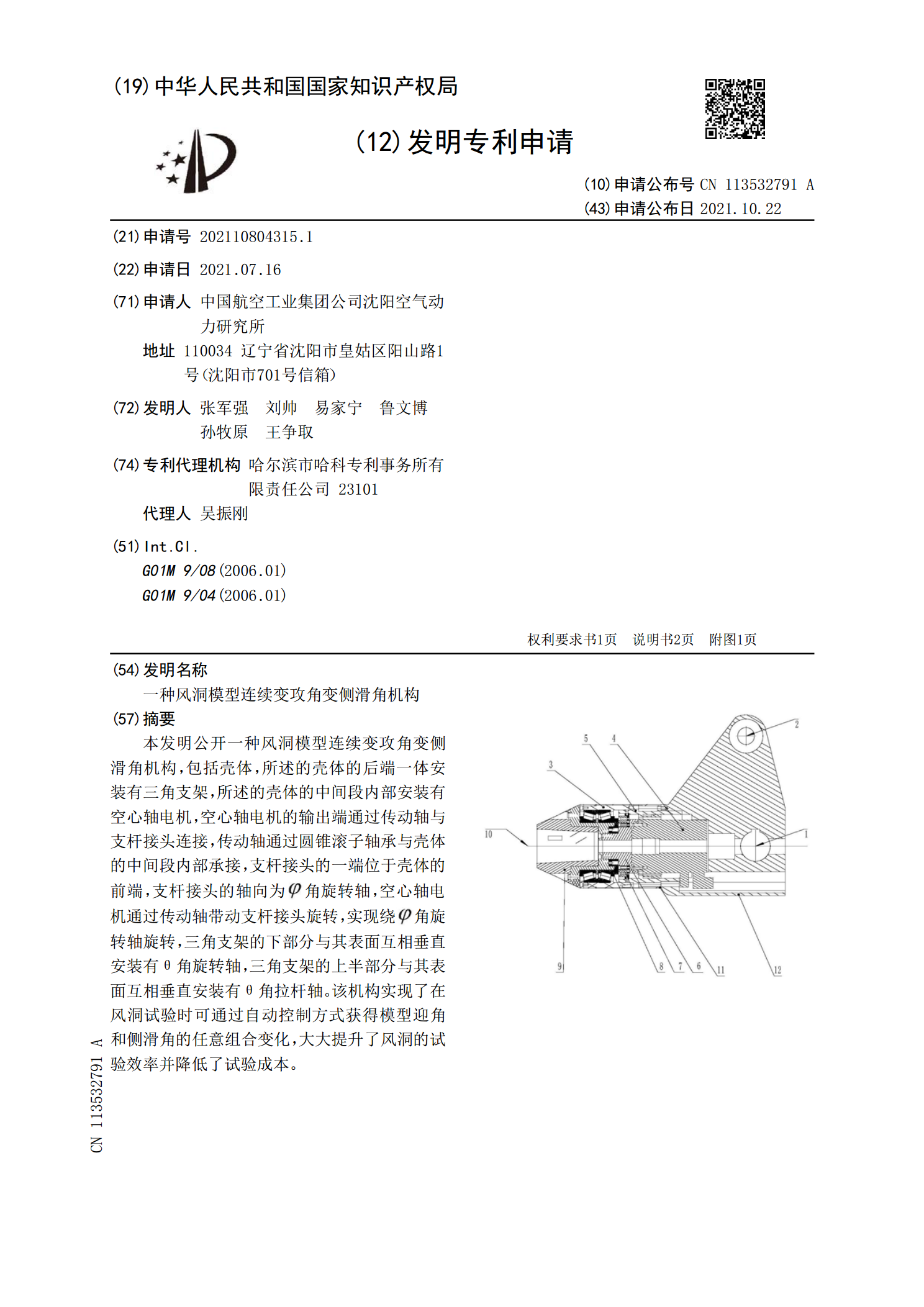
一种风洞模型连续变攻角变侧滑角机构.pdf
本发明公开一种风洞模型连续变攻角变侧滑角机构,包括壳体,所述的壳体的后端一体安装有三角支架,所述的壳体的中间段内部安装有空心轴电机,空心轴电机的输出端通过传动轴与支杆接头连接,传动轴通过圆锥滚子轴承与壳体的中间段内部承接,支杆接头的一端位于壳体的前端,支杆接头的轴向为
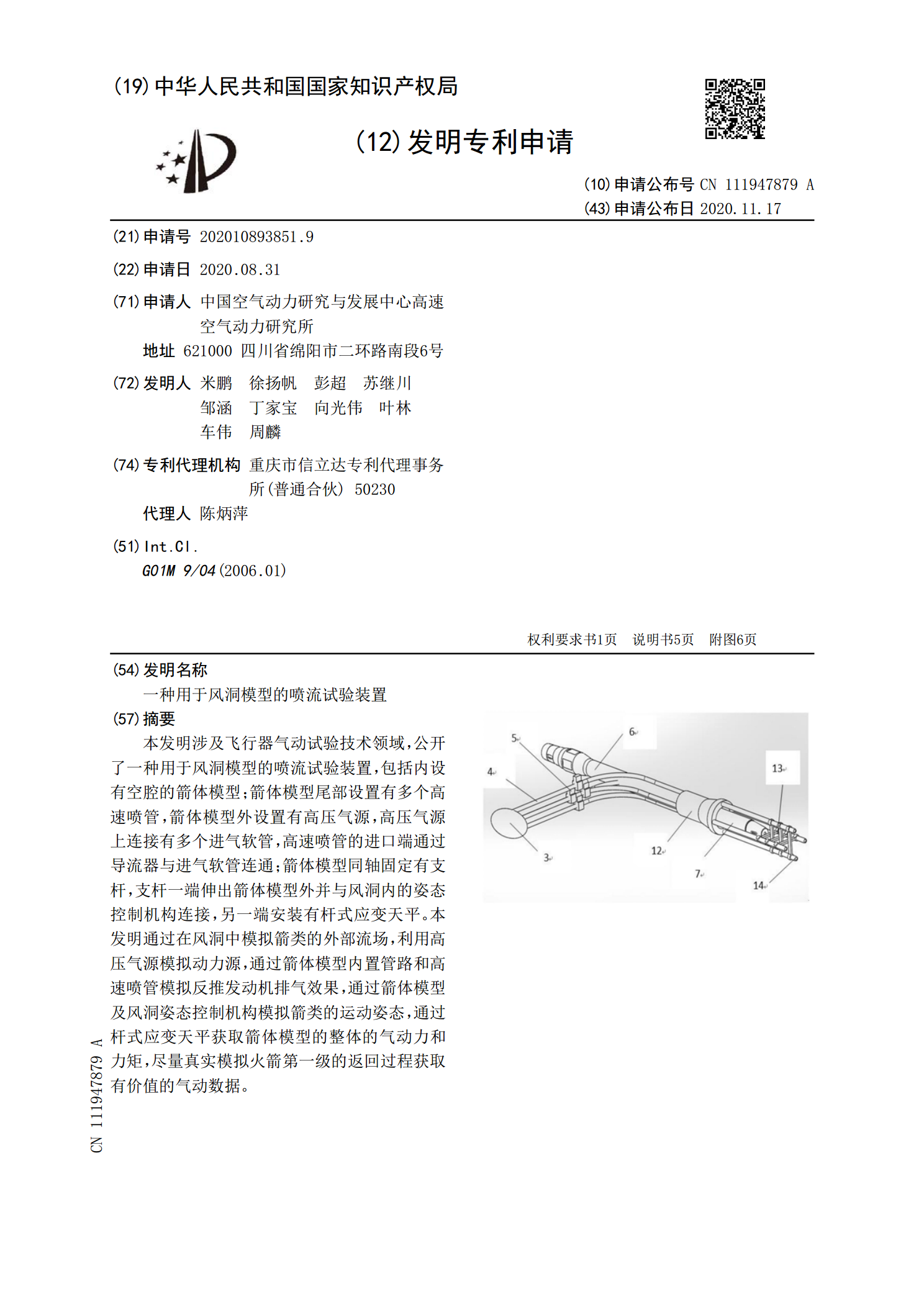
一种用于风洞模型的喷流试验装置.pdf
本发明涉及飞行器气动试验技术领域,公开了一种用于风洞模型的喷流试验装置,包括内设有空腔的箭体模型;箭体模型尾部设置有多个高速喷管,箭体模型外设置有高压气源,高压气源上连接有多个进气软管,高速喷管的进口端通过导流器与进气软管连通;箭体模型同轴固定有支杆,支杆一端伸出箭体模型外并与风洞内的姿态控制机构连接,另一端安装有杆式应变天平。本发明通过在风洞中模拟箭类的外部流场,利用高压气源模拟动力源,通过箭体模型内置管路和高速喷管模拟反推发动机排气效果,通过箭体模型及风洞姿态控制机构模拟箭类的运动姿态,通过杆式应变天