
一种基于TMD减振原理的TBM减振系统.pdf

书生****ma


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于TMD减振原理的TBM减振系统.pdf
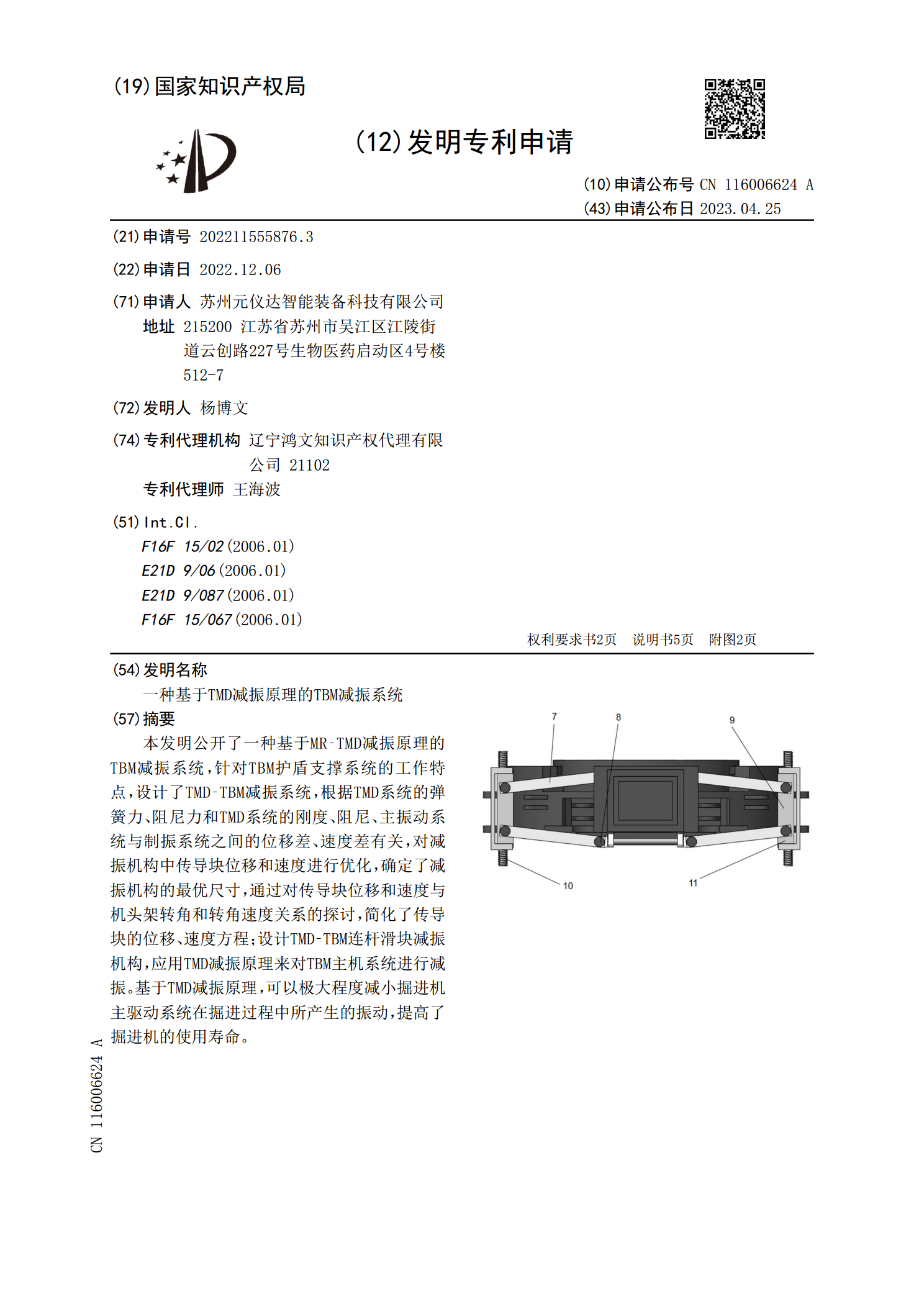
本发明公开了一种基于MR‑TMD减振原理的TBM减振系统,针对TBM护盾支撑系统的工作特点,设计了TMD‑TBM减振系统,根据TMD系统的弹簧力、阻尼力和TMD系统的刚度、阻尼、主振动系统与制振系统之间的位移差、速度差有关,对减振机构中传导块位移和速度进行优化,确定了减振机构的最优尺寸,通过对传导块位移和速度与机头架转角和转角速度关系的探讨,简化了传导块的位移、速度方程;设计TMD‑TBM连杆滑块减振机构,应用TMD减振原理来对TBM主机系统进行减振。基于TMD减振原理,可以极大程度减小掘进机主驱动系统在

隔震减震作业TMD减振原理.docx
减震与隔震理论结课作业姓名:刘****专业:结构工程日期:2014/1/15所谓结构振动控制(简称为结构控制)技术,就是指通过采取一定的控制措施以减轻或抑制结构由于动力荷载所引起的反应。调谐质量阻尼器(TunedMassDamper/TMD)作为被动控制技术之一,在生产实践中不断得到应用。TMD是在结构物顶部或下部某位置上加上惯性质量,并配以弹簧和阻尼器与主体结构相连。因其构造简单,易于安装,维护方便,经济实用,并且不需要外力作用,因此在高层建筑风振控制、桥梁及海洋平台振动控制等领域得到重视。一、TMD振

TMD减振系统在楼盖结构中的应用.docx
TMD减振系统在楼盖结构中的应用摘要本文着重研究了TMD减振系统在楼盖结构中的应用。通过对TMD减振系统的原理、结构及影响因素进行分析和研究,探讨了在楼盖结构中引入TMD减振系统的可行性和优缺点,并对其进行了数值模拟和实际应用进行验证。结果表明:TMD减振系统能够显著降低楼盖结构的振动幅值和加速度响应,从而提高了结构的抗震性能和人员的安全性。在应用过程中,需要考虑TMD的参数设计、安装位置和运行方式等因素,以达到最佳的减振效果。关键词:TMD减振系统;楼盖结构;抗震性能;振动响应AbstractThisp

基于功率法的TMD系统参数优化与减振性能分析.docx
基于功率法的TMD系统参数优化与减振性能分析摘要本文旨在通过分析TMD系统的结构与振动特性,基于功率法进行TMD系统参数优化,最终实现TMD系统减振性能分析。文章首先介绍TMD系统的工作原理和结构,然后介绍功率法在系统参数优化中的应用,接着通过确定TMD系统的结构参数,对TMD系统进行优化计算。最后,对TMD系统的减振性能进行分析,验证所得结论的正确性。关键词:TMD系统;功率法;参数优化;减振性能一、引言随着现代建筑工程的不断发展,振动问题成为一个重要的研究方向。建筑物因受到各种动力荷载或地震荷载等的影
一种减振系统及减振系统控制方法.pdf
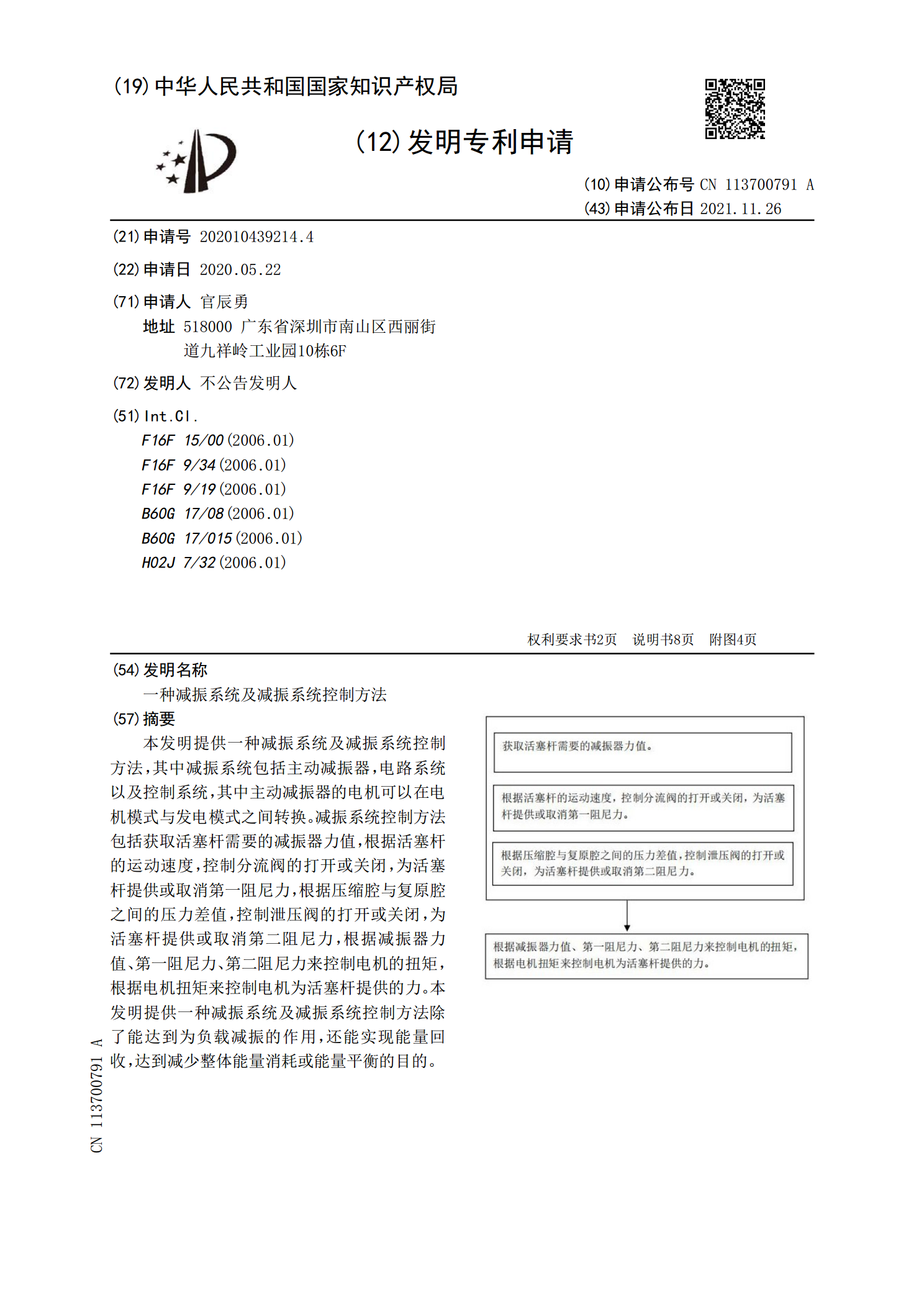
本发明提供一种减振系统及减振系统控制方法,其中减振系统包括主动减振器,电路系统以及控制系统,其中主动减振器的电机可以在电机模式与发电模式之间转换。减振系统控制方法包括获取活塞杆需要的减振器力值,根据活塞杆的运动速度,控制分流阀的打开或关闭,为活塞杆提供或取消第一阻尼力,根据压缩腔与复原腔之间的压力差值,控制泄压阀的打开或关闭,为活塞杆提供或取消第二阻尼力,根据减振器力值、第一阻尼力、第二阻尼力来控制电机的扭矩,根据电机扭矩来控制电机为活塞杆提供的力。本发明提供一种减振系统及减振系统控制方法除了能达到为负载