
基于三维Radon变换的太赫兹层析成像系统及其成像方法、操作方法.pdf

猫巷****奕声

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于三维Radon变换的太赫兹层析成像系统及其成像方法、操作方法.pdf
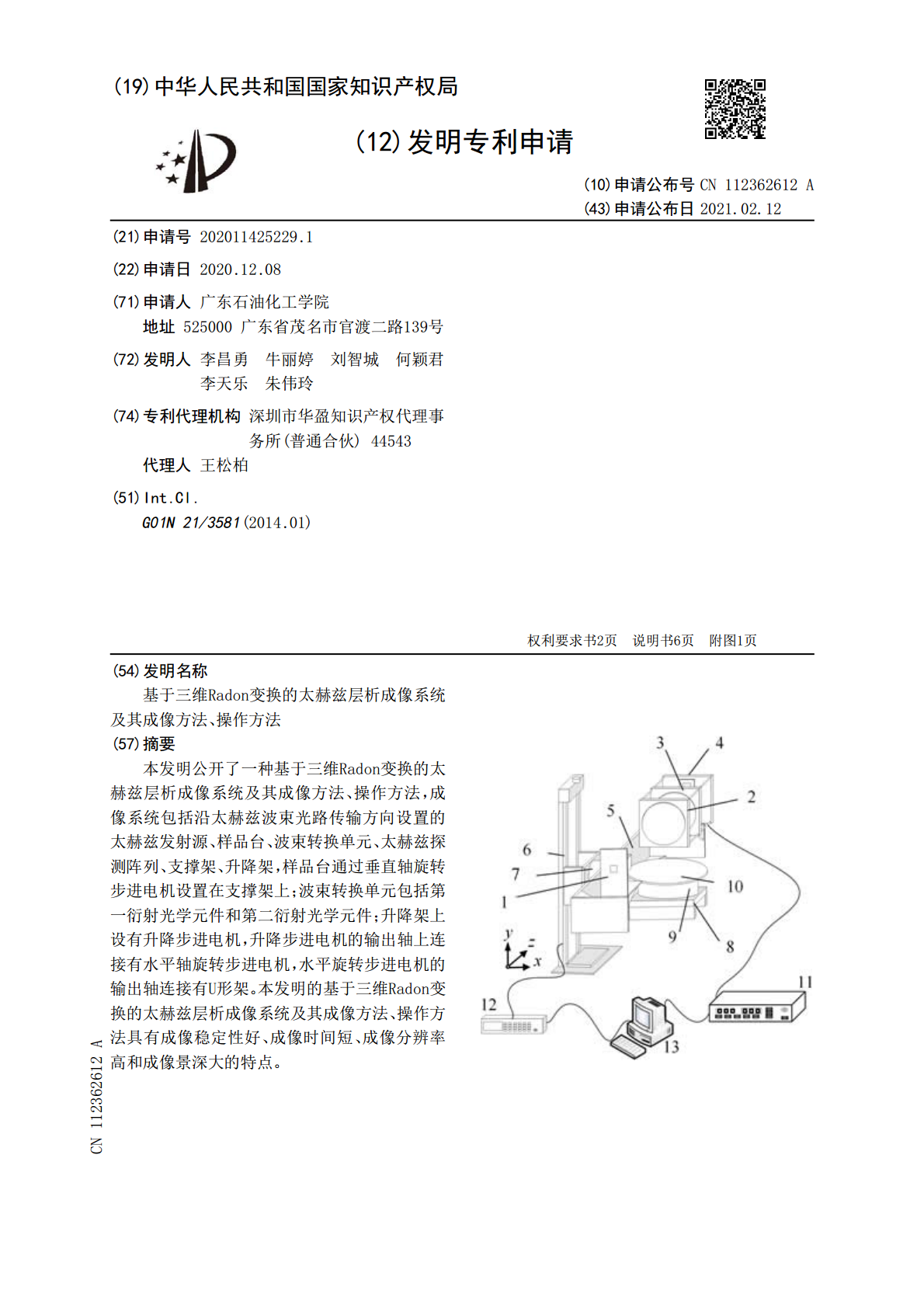
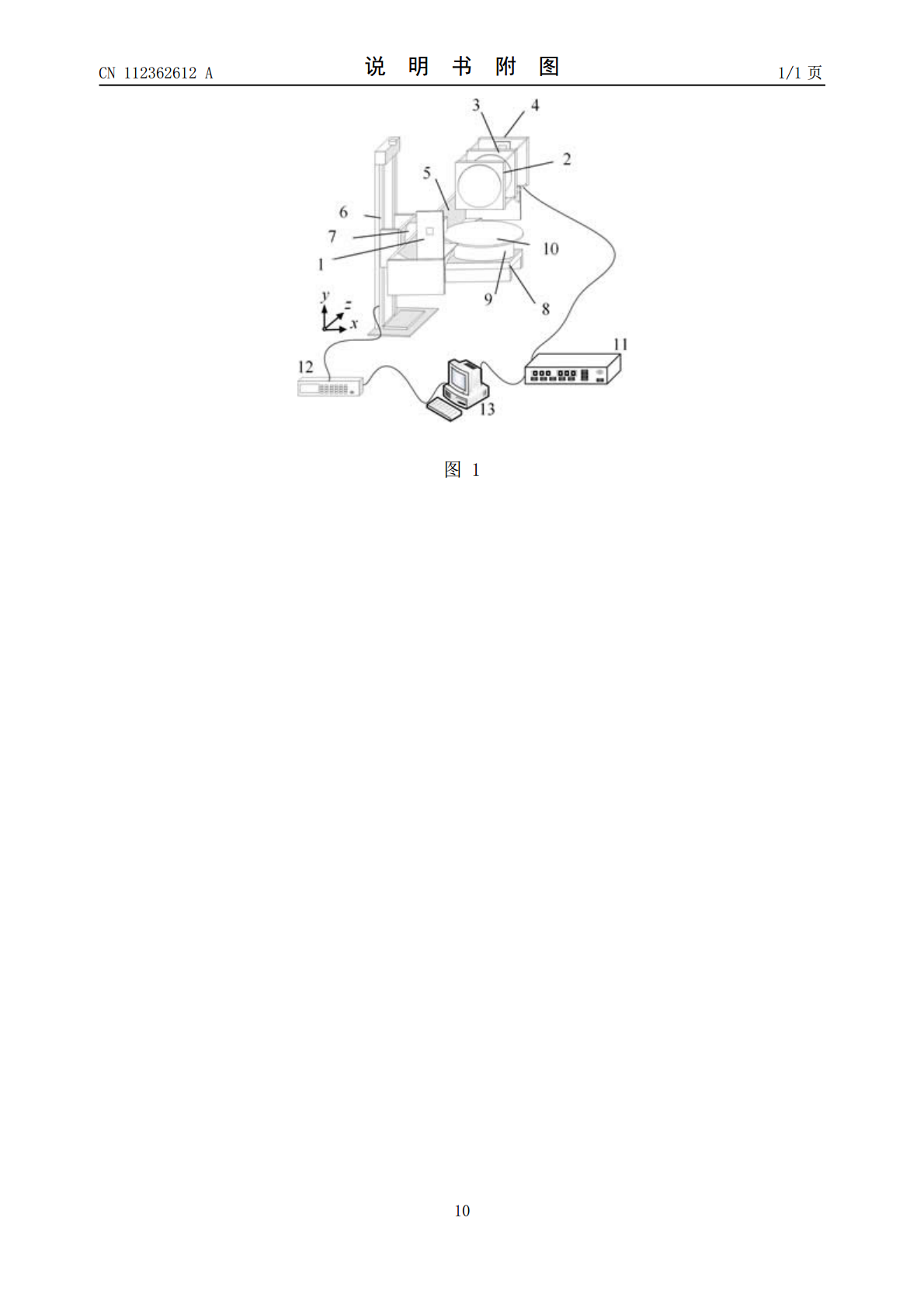
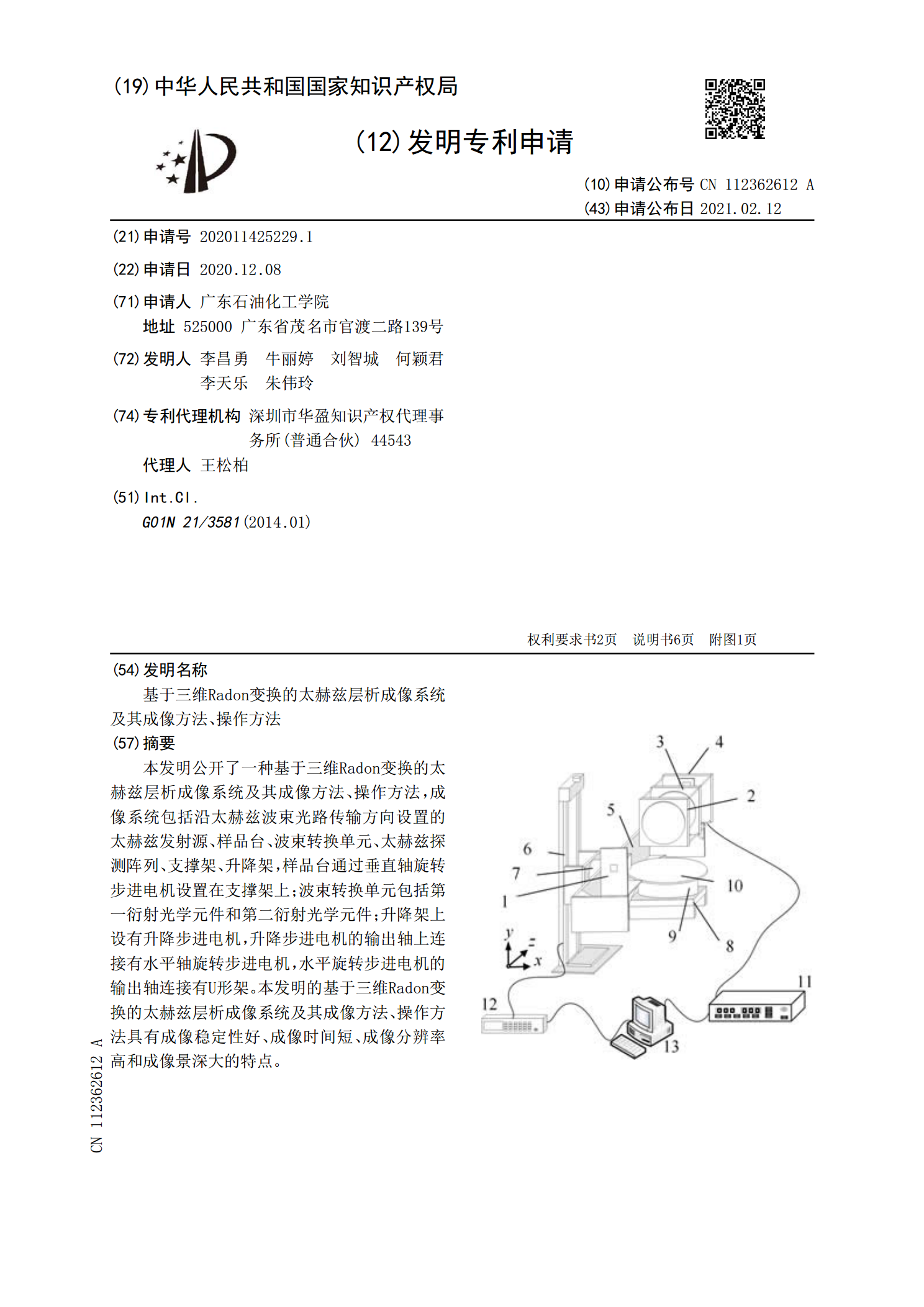
本发明公开了一种基于三维Radon变换的太赫兹层析成像系统及其成像方法、操作方法,成像系统包括沿太赫兹波束光路传输方向设置的太赫兹发射源、样品台、波束转换单元、太赫兹探测阵列、支撑架、升降架,样品台通过垂直轴旋转步进电机设置在支撑架上;波束转换单元包括第一衍射光学元件和第二衍射光学元件;升降架上设有升降步进电机,升降步进电机的输出轴上连接有水平轴旋转步进电机,水平旋转步进电机的输出轴连接有U形架。本发明的基于三维Radon变换的太赫兹层析成像系统及其成像方法、操作方法具有成像稳定性好、成像时间短、成像分辨

基于Radon变换的运动目标成像方法、装置及电子设备.pdf
本发明适用于雷达识别技术领域,提供了一种基于Radon变换的运动目标成像方法、成像装置、电子设备及计算机可读存储介质,所述成像方法包括:获取运动目标的回波信号,对所述获取的回波信号进行距离压缩,并进行距离弯曲校正,再通过Radon变换计算所述运动目标的径向速度,并对计算过程中引入的相位项进行补偿校正,最后再利用BIDI技术计算所述运动目标的方位向速度,将所述运动目标在方位多普勒域进行匹配滤波,从而得到所述运动目标的聚焦成像,应用本发明所提供的成像方法能够提高对运动目标的定位和成像结果的准确性。

太赫兹ISAR成像系统及基于后向投影的图像重建方法.pdf
太赫兹ISAR成像系统及基于后向投影的图像重建方法,所述步进太赫兹ISAR系统,包括太赫兹频率步进逆合成孔径雷达成像系统、二维高精度电控旋转台、步进电机控制器;步进电机控制器控制二维高精度电控旋转台旋转;所述太赫兹频率步进雷达成像系统包括跳频模块、射频前端、中频模块、喇叭天线模块、信号采集与处理模块;所述二维高精度电控旋转台包括超精密轴系、精密涡轮、蜗杆传动、光栅度盘、液晶屏以及标配计算机通讯接口;所述步进电机控制器包括控制单元、电机驱动器、稳压电路。

基于多发多收阵列的太赫兹近场稀疏成像方法.pdf
本发明涉及一种基于多发多收阵列的太赫兹近场稀疏成像方法,经过成像场景设置、获取太赫兹回波、回波离散化、通过Akaike信息量准则估计出散射点数目、最后通过稀疏重构算法估计目标点坐标,实现多发多收阵列的太赫兹近场稀疏成像。所提方法保留了目标信息在路径延迟中的非线性,利用观测矩阵列原子序号与目标场景之间的一一映射关系,基于稀疏重构技术的贪婪思想实现目标重构。其中,为了改善经典贪婪算法对目标稀疏度(即散射点个数)的依赖性,所提算法在每次迭代选择原子序列时,利用Akaike信息量准则,基于余量对目标的稀疏度进行自
成像系统及其操作方法.pdf
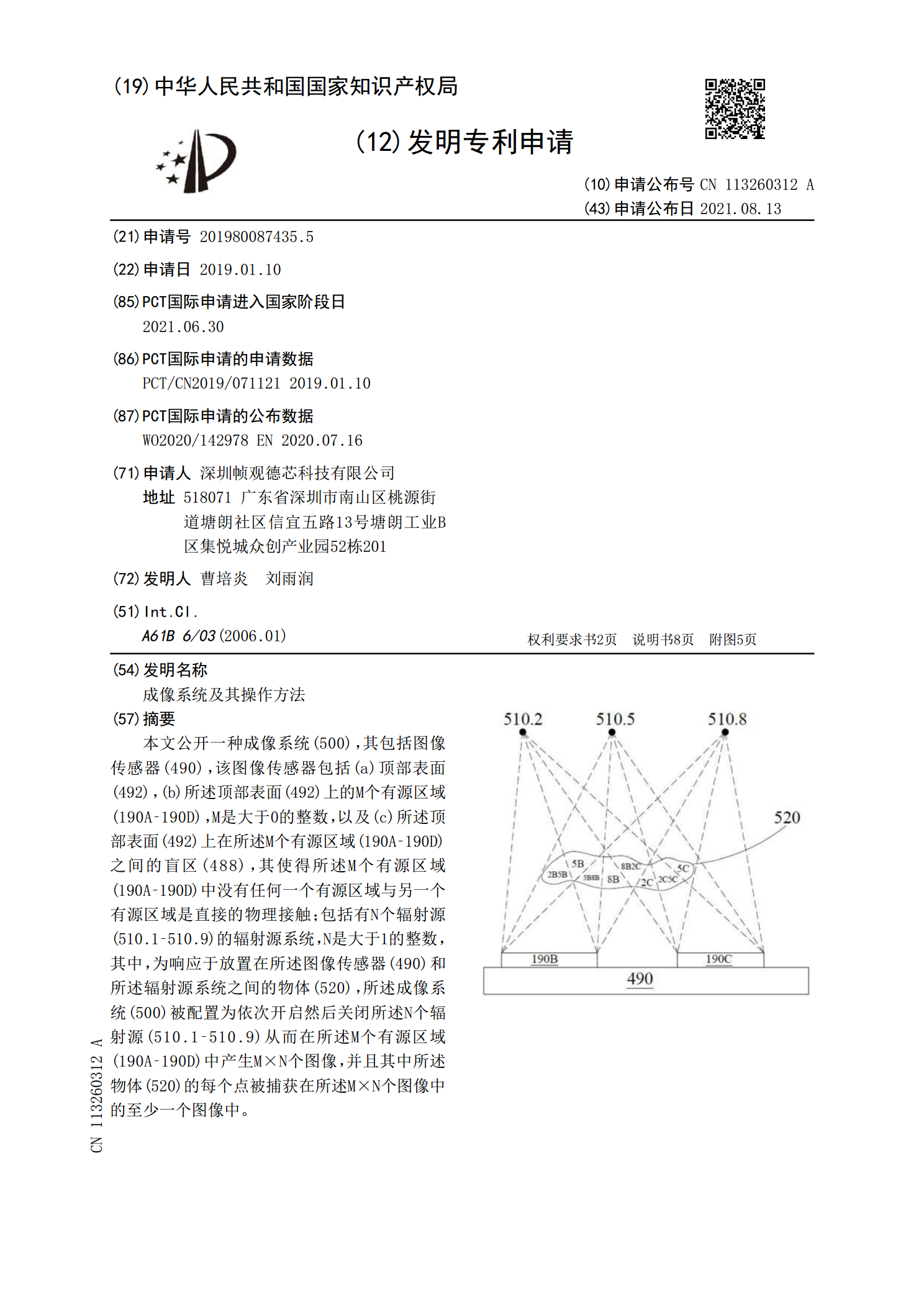
本文公开一种成像系统(500),其包括图像传感器(490),该图像传感器包括(a)顶部表面(492),(b)所述顶部表面(492)上的M个有源区域(190A‑190D),M是大于0的整数,以及(c)所述顶部表面(492)上在所述M个有源区域(190A‑190D)之间的盲区(488),其使得所述M个有源区域(190A‑190D)中没有任何一个有源区域与另一个有源区域是直接的物理接触;包括有N个辐射源(510.1‑510.9)的辐射源系统,N是大于1的整数,其中,为响应于放置在所述图像传感器(490)和所述辐