
太赫兹ISAR成像系统及基于后向投影的图像重建方法.pdf

一只****生物

1/10

2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

太赫兹ISAR成像系统及基于后向投影的图像重建方法.pdf
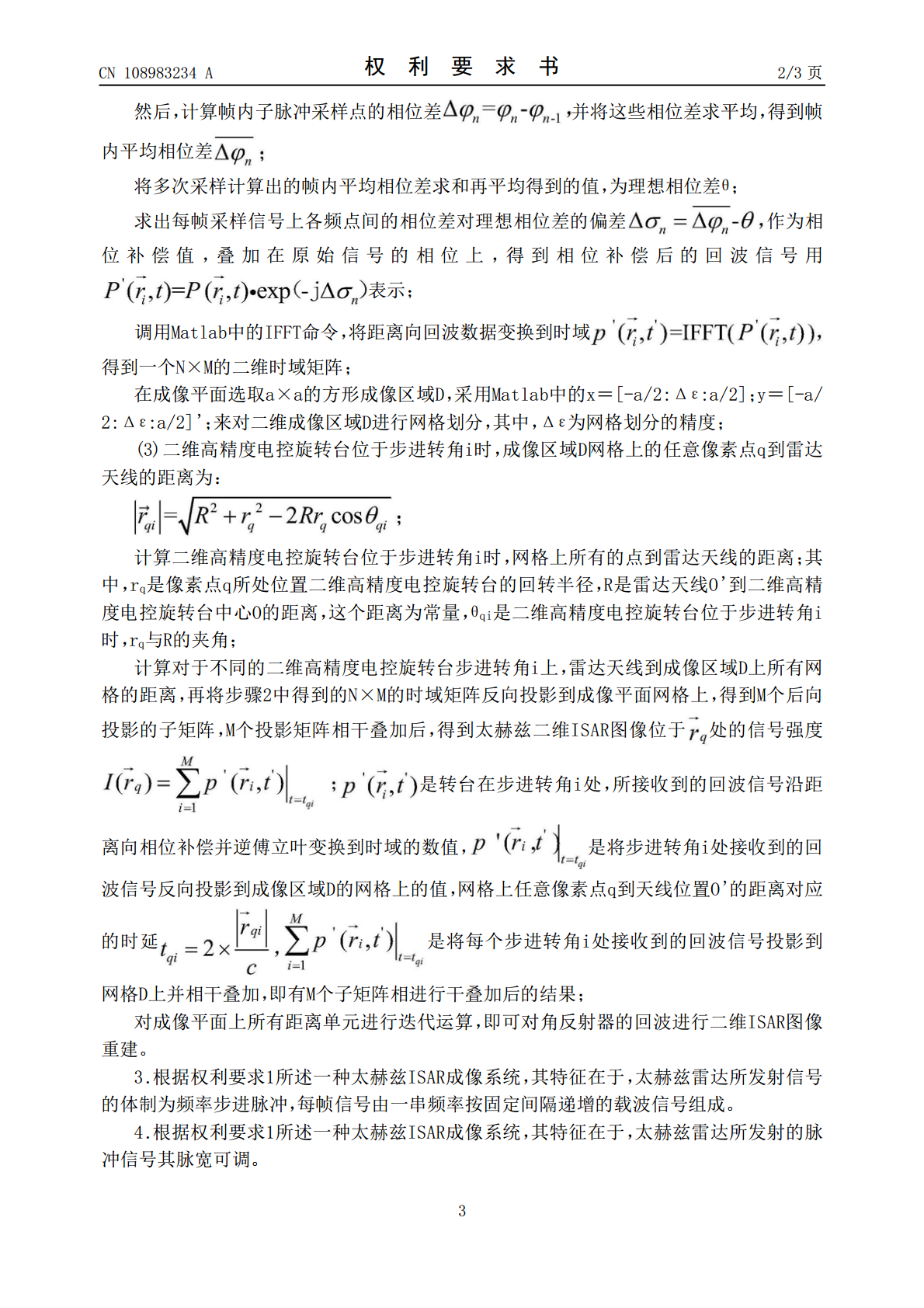
太赫兹ISAR成像系统及基于后向投影的图像重建方法,所述步进太赫兹ISAR系统,包括太赫兹频率步进逆合成孔径雷达成像系统、二维高精度电控旋转台、步进电机控制器;步进电机控制器控制二维高精度电控旋转台旋转;所述太赫兹频率步进雷达成像系统包括跳频模块、射频前端、中频模块、喇叭天线模块、信号采集与处理模块;所述二维高精度电控旋转台包括超精密轴系、精密涡轮、蜗杆传动、光栅度盘、液晶屏以及标配计算机通讯接口;所述步进电机控制器包括控制单元、电机驱动器、稳压电路。

太赫兹全息成像重建算法与实验研究.docx
太赫兹全息成像重建算法与实验研究摘要:太赫兹全息成像技术由于其具有非接触、非破坏、高分辨率等优点,被广泛地应用于生物医学、安检、材料检测等领域。在太赫兹全息成像中,重建算法是一项非常关键的技术,它决定了图像的质量和分辨率。本文主要介绍太赫兹全息成像的基本原理和重建算法,详细描述了全息重建的过程和步骤,并使用实验验证了算法的可行性和优越性。关键词:太赫兹全息成像,重建算法,全息重建引言:太赫兹波(THz)是介于微波和红外线之间的一种电磁波,其频率范围在0.1THz-10THz之间。太赫兹波在穿透生物组织和许

太赫兹MIMO成像重建算法与实验研究.docx
太赫兹MIMO成像重建算法与实验研究太赫兹MIMO成像重建算法与实验研究摘要:太赫兹(THz)成像技术已经成为一种用于非侵入式检测和成像的重要工具。然而,由于太赫兹波在传播中的弱穿透能力和散射特性,太赫兹成像的分辨率和图像质量有限。为了解决这些问题,本文基于多输入多输出(MIMO)成像技术,提出了一种太赫兹MIMO成像重建算法,并进行了相关的实验研究。实验结果表明,所提出的算法可以显著提高太赫兹成像的分辨率和图像质量,具有较好的应用前景。关键词:太赫兹MIMO成像;重建算法;分辨率;图像质量1.引言太赫兹

基于太赫兹电磁波的火灾主动成像系统.docx
基于太赫兹电磁波的火灾主动成像系统基于太赫兹电磁波的火灾主动成像系统摘要:火灾是一种常见且具有严重威胁的灾害,造成了巨大的人员伤亡和财产损失。因此,有效的火灾监测和控制方法对于保护人民生命和财产安全至关重要。本文介绍了一种基于太赫兹电磁波的火灾主动成像系统,该系统利用太赫兹波的渗透能力和火焰辐射的特点来实现火灾的早期检测和成像。实验结果表明,该系统在火灾检测和成像方面具有较高的精度和稳定性,可为火灾救援工作提供有力的支持。引言:火灾是一种常见的灾害事件,给人民的生命和财产安全带来了严重威胁。因此,火灾的早

基于时域后向投影的光声谱成像系统研究.docx
基于时域后向投影的光声谱成像系统研究光声谱成像技术是一种可以基于光学和声学原理相结合的成像技术,它可以应用于生物医学、工业检测、材料分析和环境监测等领域。在这些应用中,精确的成像结果是至关重要的,因此如何优化光声成像系统的性能和精度一直是研究的热点和难点之一。本文将讨论一种基于时域后向投影的光声谱成像系统。一、光声成像原理光声成像技术是基于光声效应而来的,即普通光在光学介质中传播时被吸收后,会在介质中产生热量,进而导致介质体积的热膨胀,从而形成了声学信号。因此,光声成像的基本原理就是利用可见光激光的吸收产