
一种欠驱动式肩关节康复训练装置.pdf

灵波****ng

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种欠驱动式肩关节康复训练装置.pdf
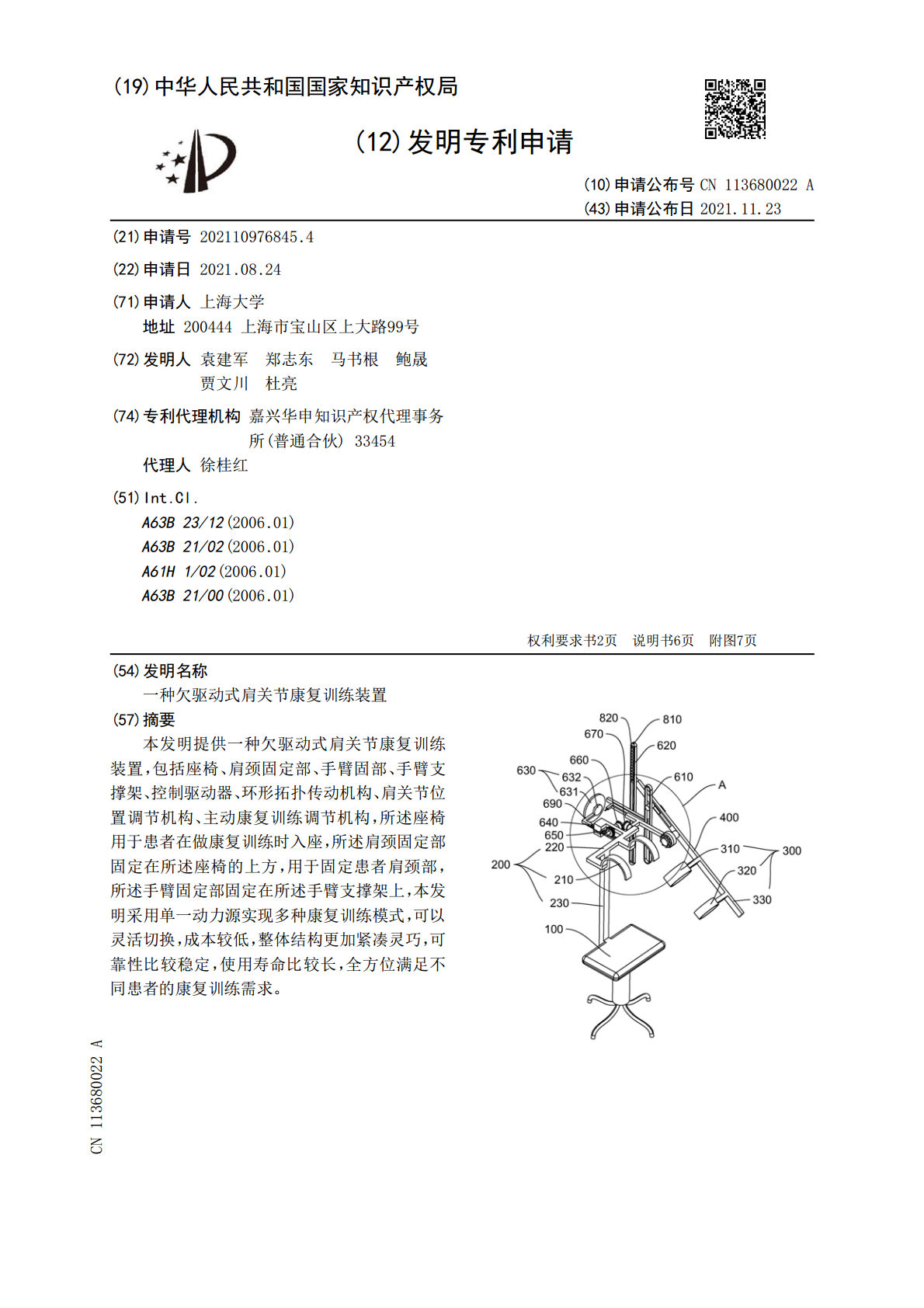
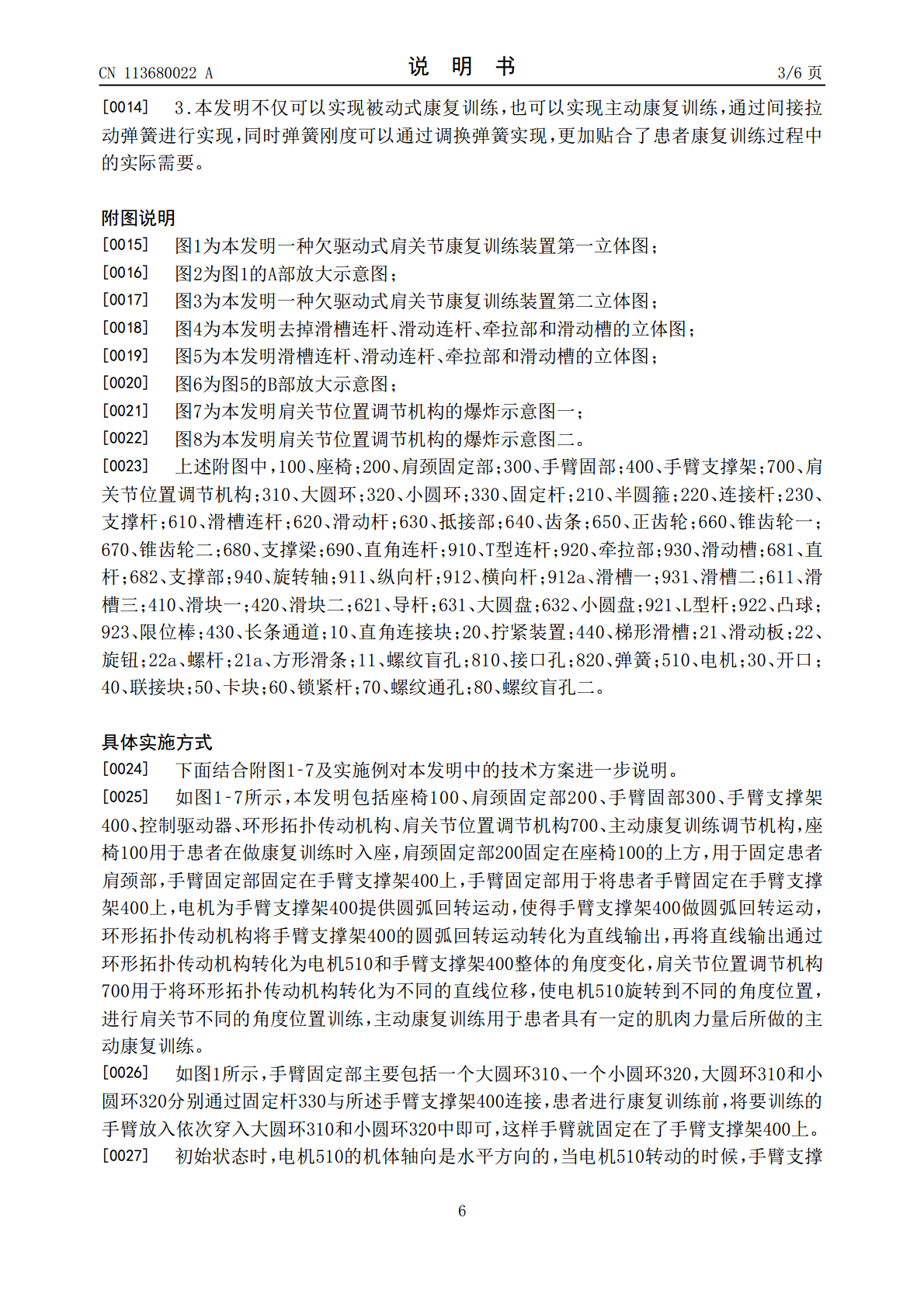
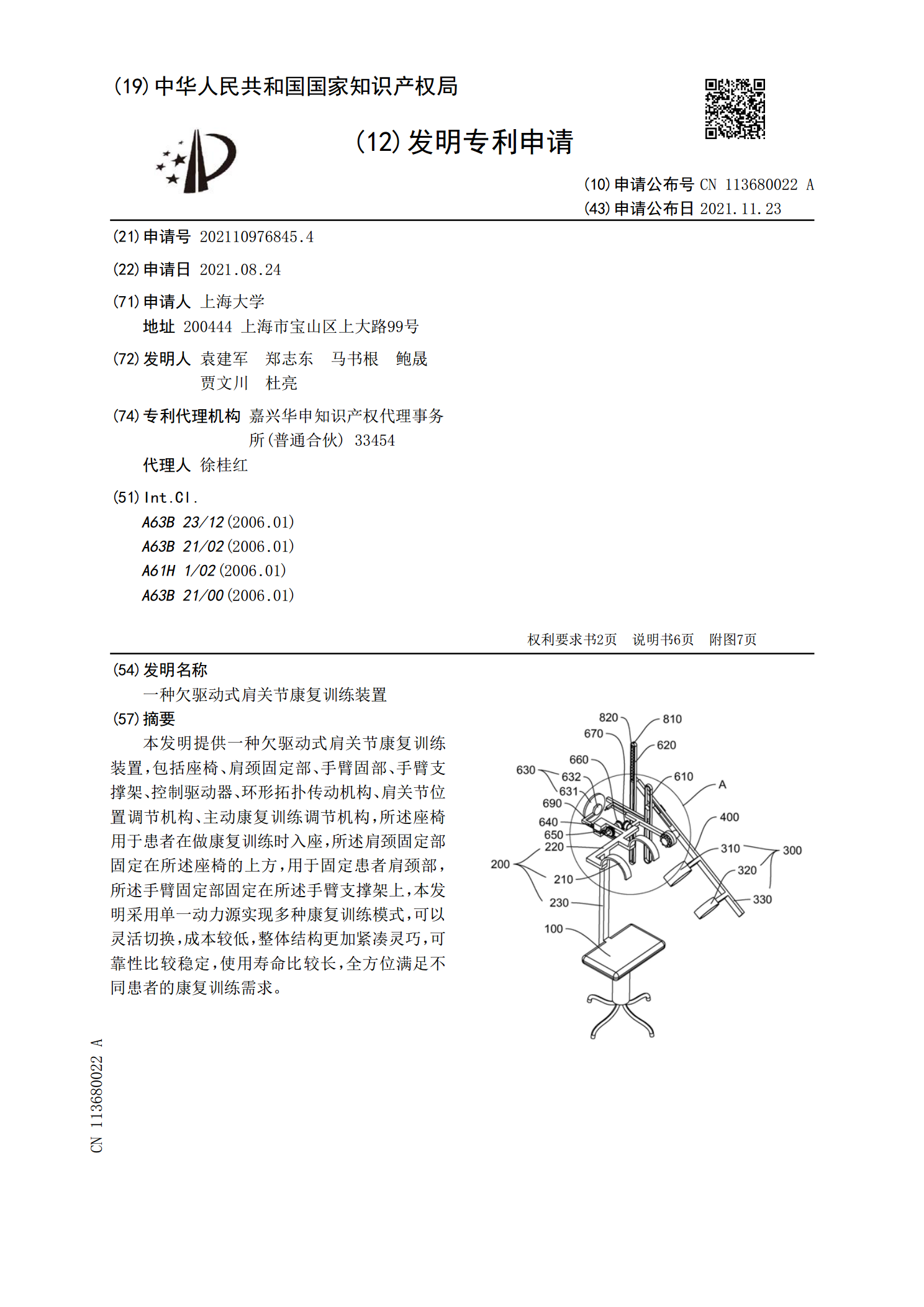
本发明提供一种欠驱动式肩关节康复训练装置,包括座椅、肩颈固定部、手臂固部、手臂支撑架、控制驱动器、环形拓扑传动机构、肩关节位置调节机构、主动康复训练调节机构,所述座椅用于患者在做康复训练时入座,所述肩颈固定部固定在所述座椅的上方,用于固定患者肩颈部,所述手臂固定部固定在所述手臂支撑架上,本发明采用单一动力源实现多种康复训练模式,可以灵活切换,成本较低,整体结构更加紧凑灵巧,可靠性比较稳定,使用寿命比较长,全方位满足不同患者的康复训练需求。
一种广义肩关节康复训练装置.pdf
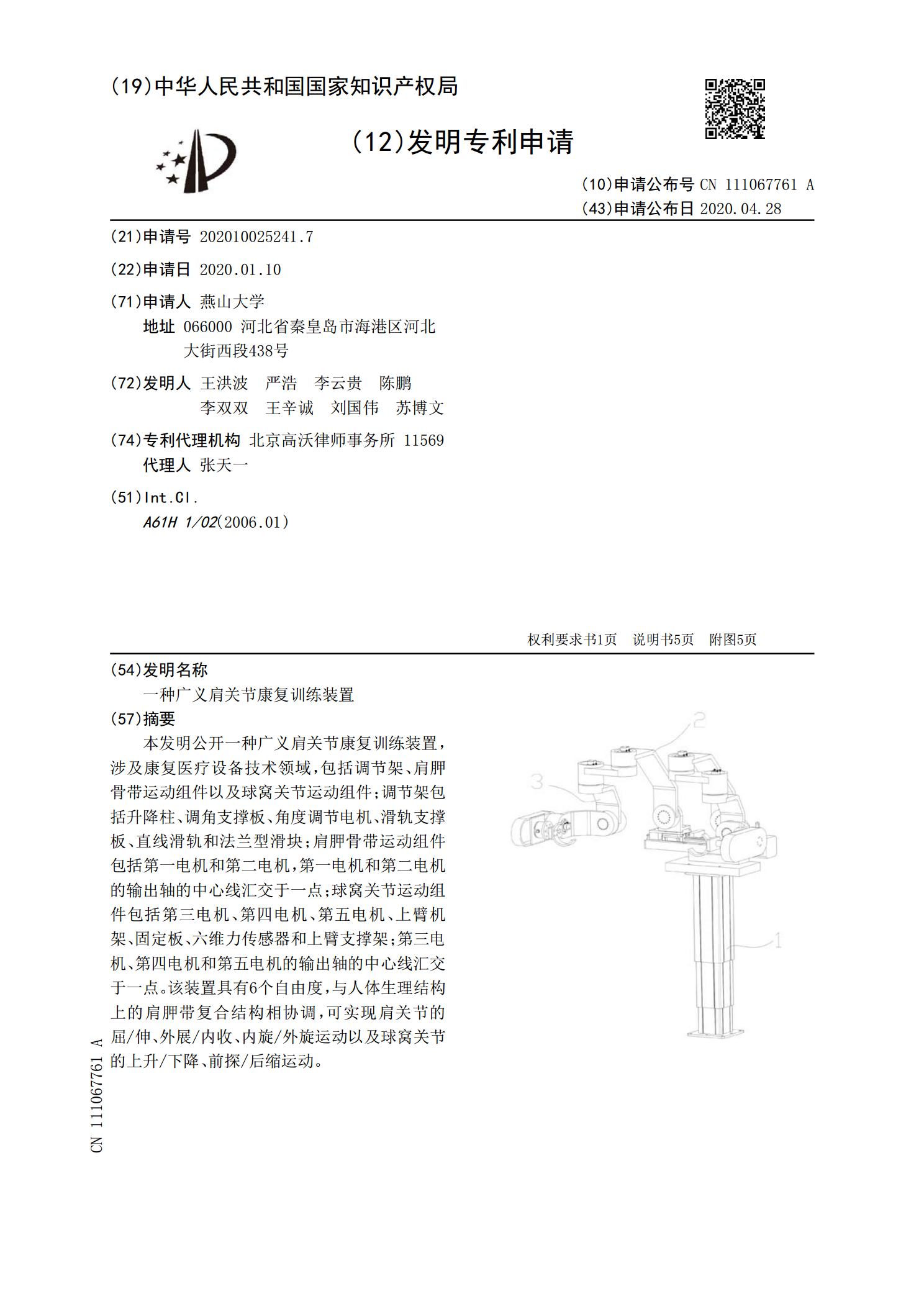
本发明公开一种广义肩关节康复训练装置,涉及康复医疗设备技术领域,包括调节架、肩胛骨带运动组件以及球窝关节运动组件;调节架包括升降柱、调角支撑板、角度调节电机、滑轨支撑板、直线滑轨和法兰型滑块;肩胛骨带运动组件包括第一电机和第二电机,第一电机和第二电机的输出轴的中心线汇交于一点;球窝关节运动组件包括第三电机、第四电机、第五电机、上臂机架、固定板、六维力传感器和上臂支撑架;第三电机、第四电机和第五电机的输出轴的中心线汇交于一点。该装置具有6个自由度,与人体生理结构上的肩胛带复合结构相协调,可实现肩关节的屈/伸
一种多功能肩关节康复训练装置.pdf
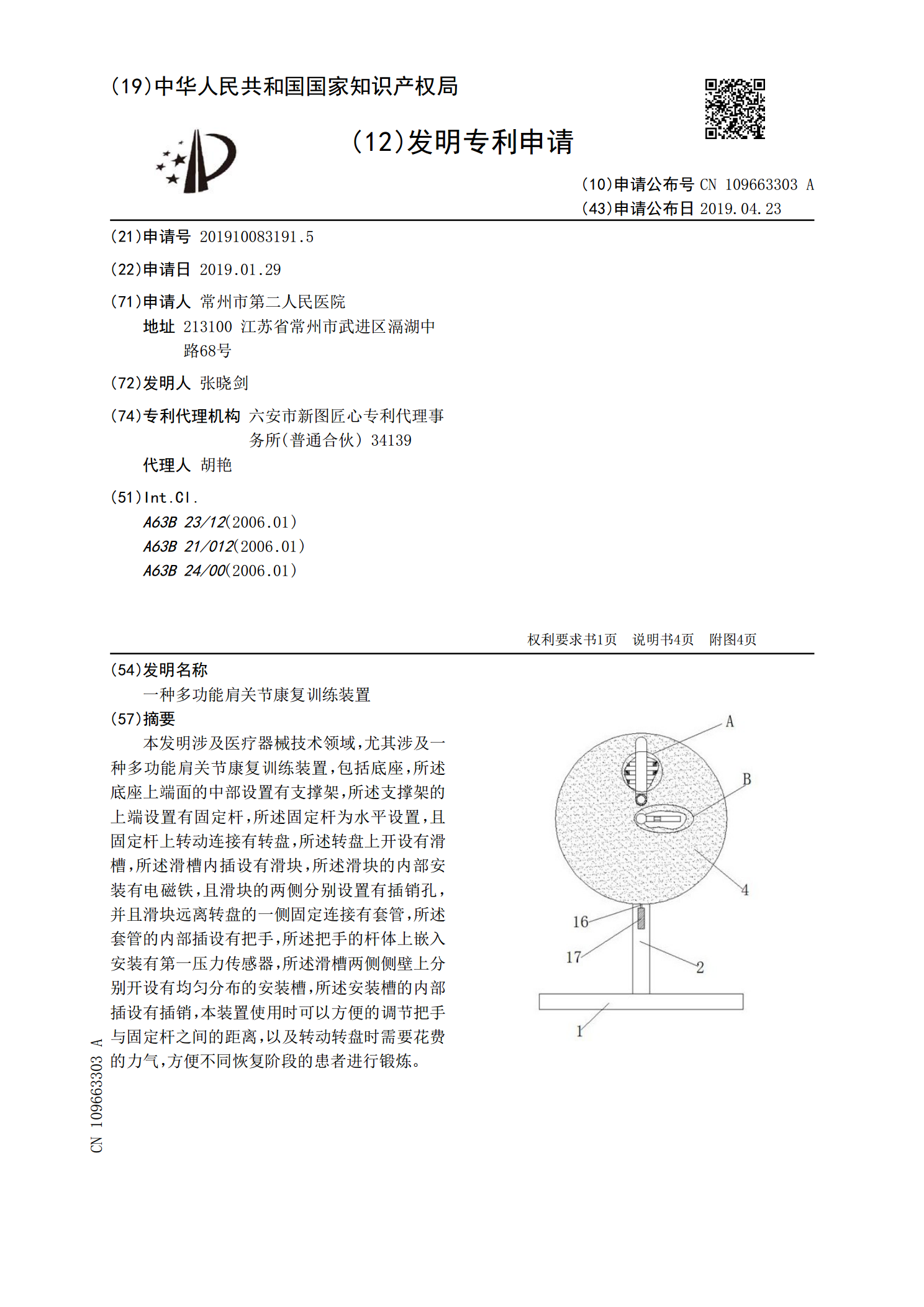
本发明涉及医疗器械技术领域,尤其涉及一种多功能肩关节康复训练装置,包括底座,所述底座上端面的中部设置有支撑架,所述支撑架的上端设置有固定杆,所述固定杆为水平设置,且固定杆上转动连接有转盘,所述转盘上开设有滑槽,所述滑槽内插设有滑块,所述滑块的内部安装有电磁铁,且滑块的两侧分别设置有插销孔,并且滑块远离转盘的一侧固定连接有套管,所述套管的内部插设有把手,所述把手的杆体上嵌入安装有第一压力传感器,所述滑槽两侧侧壁上分别开设有均匀分布的安装槽,所述安装槽的内部插设有插销,本装置使用时可以方便的调节把手与固定杆之

一种腱式欠驱动自适应多指手装置.pdf
腱式欠驱动自适应多指手装置,属于拟人机器人技术领域。本发明食指(2)、中指(3)、无名指(4)的驱动机构相同,尺寸不同;拇指(1)的驱动原理与各指相同,设计了能模拟人手拇指运动的机构;腱(37)固定于各指末指节,通过指节上滑轮导向(32);各指关节安装有左右两个扭转弹簧;各指的一端固定连接于掌部(6);掌部设有腱槽和导向滑轮(7),将腱导向到手臂的驱动单元中;每个指节上装有橡胶片(5)。本发明驱动器少,每个手指只需要一个电机驱动,结构简单,控制难度低,可实现对物体的自适应包络抓取。
一种残疾人肩关节康复训练装置.pdf
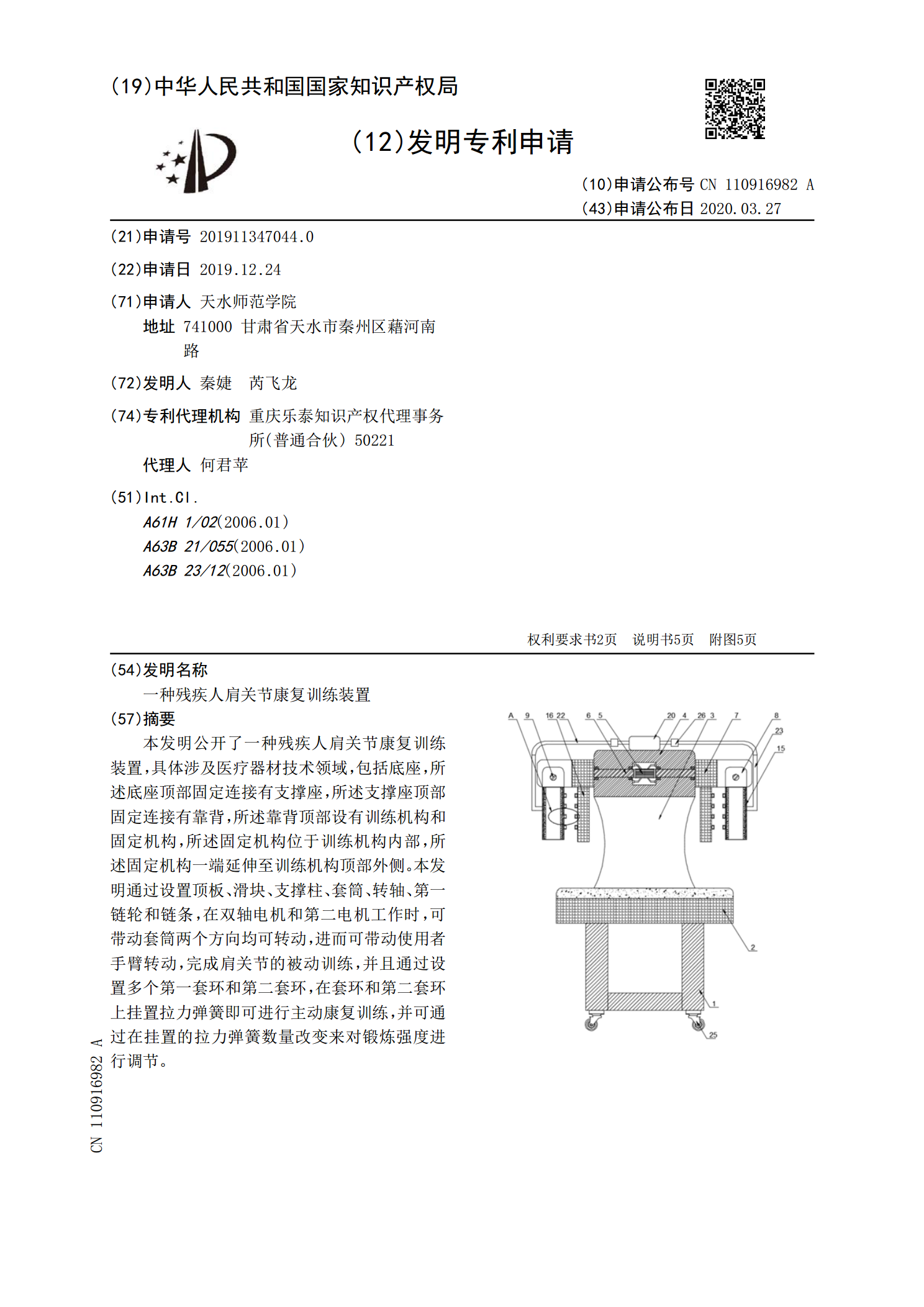
本发明公开了一种残疾人肩关节康复训练装置,具体涉及医疗器材技术领域,包括底座,所述底座顶部固定连接有支撑座,所述支撑座顶部固定连接有靠背,所述靠背顶部设有训练机构和固定机构,所述固定机构位于训练机构内部,所述固定机构一端延伸至训练机构顶部外侧。本发明通过设置顶板、滑块、支撑柱、套筒、转轴、第一链轮和链条,在双轴电机和第二电机工作时,可带动套筒两个方向均可转动,进而可带动使用者手臂转动,完成肩关节的被动训练,并且通过设置多个第一套环和第二套环,在套环和第二套环上挂置拉力弹簧即可进行主动康复训练,并可通过在挂