
一种高空带电作业机器人线夹专用安装工具.pdf

努力****振宇


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种高空带电作业机器人线夹专用安装工具.pdf
一种高空带电作业机器人线夹专用安装工具,包括机械臂连接头、支撑架、安装支架、缓冲机构、线夹支撑机构和自动旋转机构,支撑架固定在机械臂连接头上,安装支架通过缓冲机构安装在支撑架上,缓冲机构用于缓冲线夹受到的冲击力对机器人机械臂的影响,线夹支撑机构和自动旋转机构均安装在安装支架上,线夹支撑机构用于安放待安装的线夹,自动旋转机构用于对悬挂在电缆线上的线夹上的夹紧螺栓进行拧紧操作;缓冲机构可包括滑轨、滑块和回位弹簧。本发明可实现自动将线夹悬挂并拧紧固定在电缆线上的高空带电作业,多种结构保证了作业顺利进行和作业安全
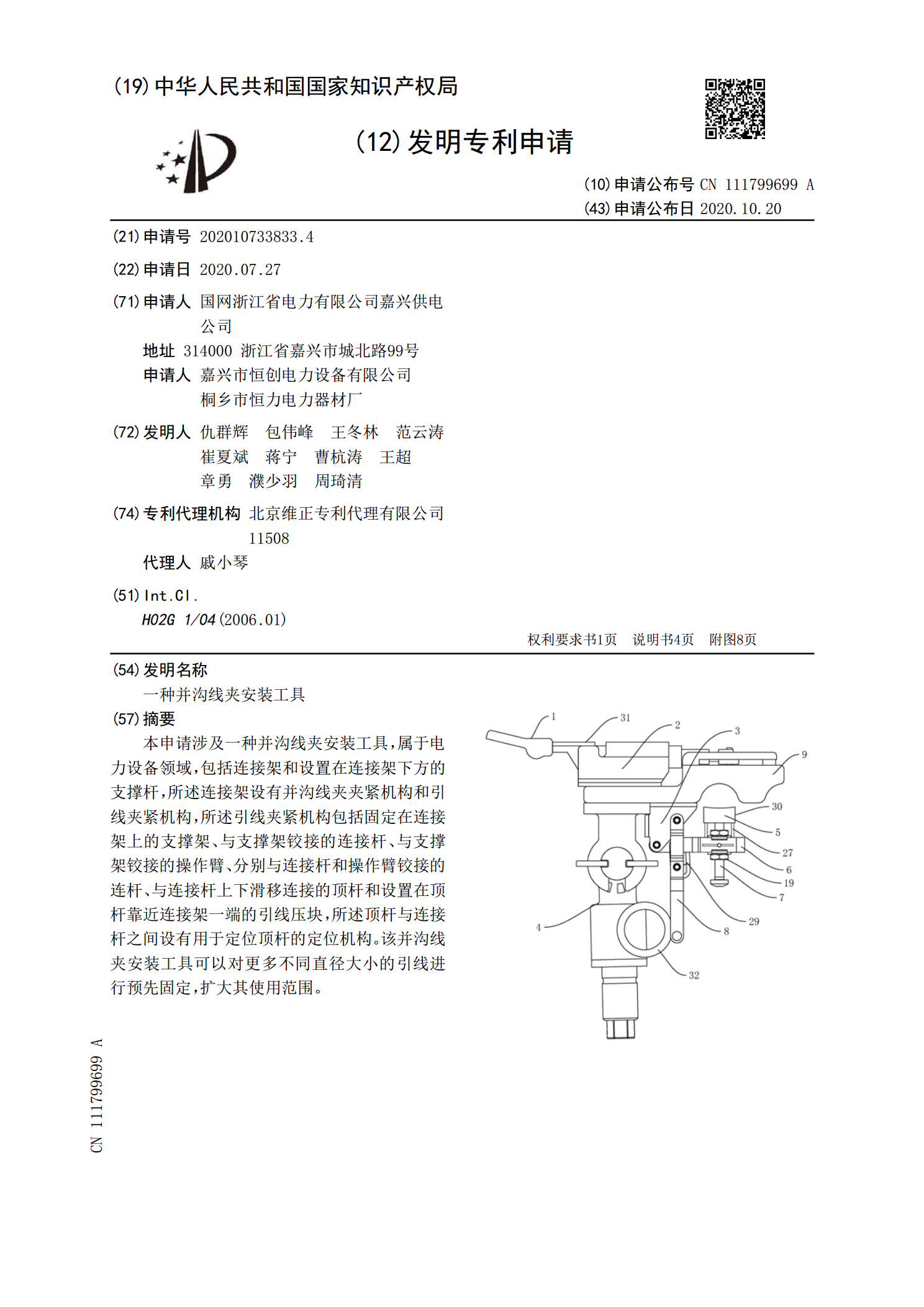
一种并沟线夹安装工具.pdf
本申请涉及一种并沟线夹安装工具,属于电力设备领域,包括连接架和设置在连接架下方的支撑杆,所述连接架设有并沟线夹夹紧机构和引线夹紧机构,所述引线夹紧机构包括固定在连接架上的支撑架、与支撑架铰接的连接杆、与支撑架铰接的操作臂、分别与连接杆和操作臂铰接的连杆、与连接杆上下滑移连接的顶杆和设置在顶杆靠近连接架一端的引线压块,所述顶杆与连接杆之间设有用于定位顶杆的定位机构。该并沟线夹安装工具可以对更多不同直径大小的引线进行预先固定,扩大其使用范围。

一种10kV配网带电作业机器人专用剥线工具.pdf
本发明涉及电力作业设备技术领域,提出了一种kV配网带电作业机器人专用剥线工具,其便于代替人力对电线进行自动剥线,较为省时省力,危险性较低,保护了操作人员的生命安全,包括固定架,调节机构;调节机构安装在固定架上,用于调节剥线位置;夹紧机构,夹紧机构设置在固定架上,用于对电线进行夹紧和切割;切割机构,切割机构设置在固定架上,用于对电线进行剥皮,调节机构包括第一电机,第一电机安装在固定架上,第一电机的输出端贯穿固定架并连接有转动齿轮,固定架上滑动连接有两个调节齿带,转动齿轮与两个调节齿轮啮合,夹紧机构包括两个固

一种绝缘穿刺线夹安装工具.pdf
一种绝缘穿刺线夹安装工具,涉及一种绝缘穿刺线夹安装装置,在绝缘杆(7)上端设有块体(3),转杆(2)套在块体上部的转杆座(1)上,在转杆的一端设有旋转机构,转杆另一端的所述伞齿轮(18)齿连接块体一端设置的旋转块(23)上部的另一伞齿轮,在旋转块上设有内六方孔(17),在平板(13)上部间隔设有两个夹持钩(16),所述两个夹持钩的相对一侧中部连接两根拉线(12)的上端,两根拉线的下部穿过平板、托线杆(11)后连接绝缘杆(7)下部另一侧手柄(9)上设置的拉杆(10);本发明通过旋转机构控制旋转块使绝缘穿刺线
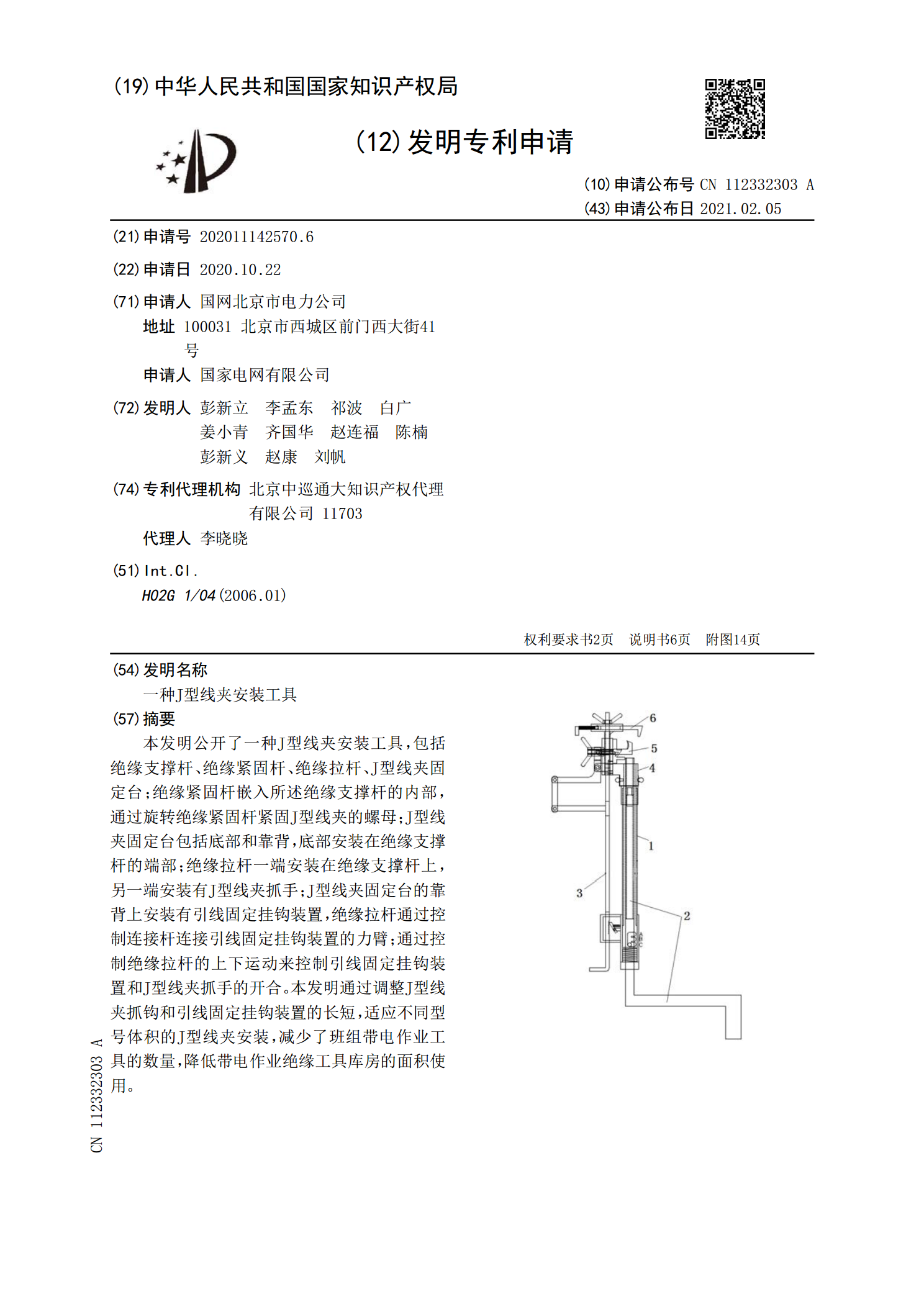
一种J型线夹安装工具.pdf
本发明公开了一种J型线夹安装工具,包括绝缘支撑杆、绝缘紧固杆、绝缘拉杆、J型线夹固定台;绝缘紧固杆嵌入所述绝缘支撑杆的内部,通过旋转绝缘紧固杆紧固J型线夹的螺母;J型线夹固定台包括底部和靠背,底部安装在绝缘支撑杆的端部;绝缘拉杆一端安装在绝缘支撑杆上,另一端安装有J型线夹抓手;J型线夹固定台的靠背上安装有引线固定挂钩装置,绝缘拉杆通过控制连接杆连接引线固定挂钩装置的力臂;通过控制绝缘拉杆的上下运动来控制引线固定挂钩装置和J型线夹抓手的开合。本发明通过调整J型线夹抓钩和引线固定挂钩装置的长短,适应不同型号体